RC connection/MH carrier directly to VOXL2, while using Flight core V2
-
@Jetson-Nano Which connector would you use for this on VOXL 2? In order to send RC values to PX4 running on an external FC v2 you need to send the RC values in an RC_CHANNELS_OVERRIDE Mavlink message. (https://mavlink.io/en/messages/common.html#RC_CHANNELS_OVERRIDE) So, you would need a custom program on the VOXL 2 to read the input from the RC receiver, create the Mavlink message, and send it to the external FC over the UART.
-
@Jetson-Nano Which connector would you use for this on VOXL 2? In order to send RC values to PX4 running on an external FC v2 you need to send the RC values in an RC_CHANNELS_OVERRIDE Mavlink message. (https://mavlink.io/en/messages/common.html#RC_CHANNELS_OVERRIDE) So, you would need a custom program on the VOXL 2 to read the input from the RC receiver, create the Mavlink message, and send it to the external FC over the UART.
@Eric-Katzfey thanks for reverting back. can you be little more specific about where to create the custom program and run it. is it inside any servers or externally.
could guide me with the development. -
@Eric-Katzfey thanks for reverting back. can you be little more specific about where to create the custom program and run it. is it inside any servers or externally.
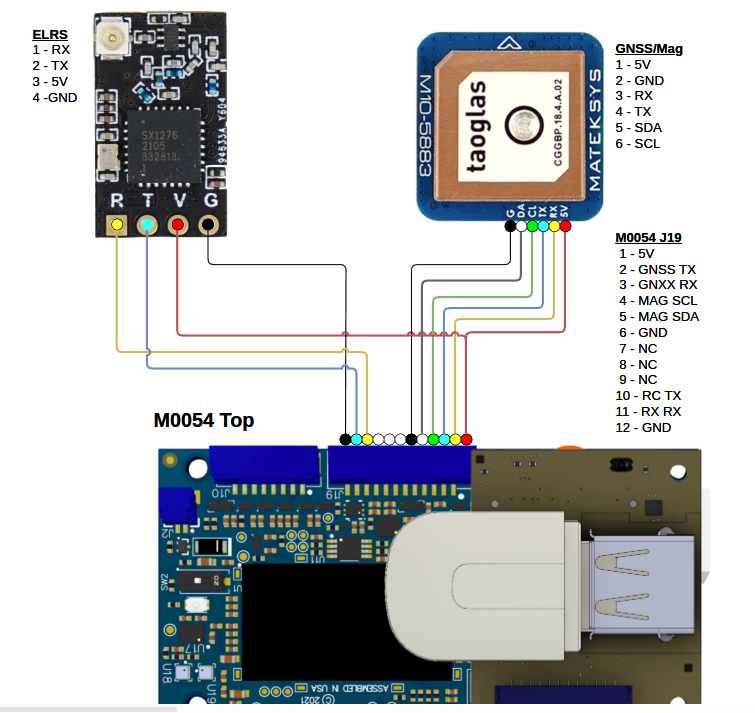
could guide me with the development.@Eric-Katzfey I'm planning to use the similar case as in Starling 2 Drone. I'm planning to use the J19 port.
-
@Eric-Katzfey I'm planning to use the similar case as in Starling 2 Drone. I'm planning to use the J19 port.
@Jetson-Nano I think what you are trying to do is entirely possible. But it isn't anything we have ever tried. So I'm just throwing out some ideas that could maybe help you develop this. Or maybe you have some better ideas. One possibility, that I was referring to above, is to create a new program running on the Linux applications processor. It would have to use the libqrb5165-io library to get access to the UART on J19 that is mapped to the SLPI DSP. Another idea is to actually run PX4 on VOXL 2 and either use
px4-listenerto monitor the input_rc topic or monitor the RC_CHANNELS Mavlink message via voxl-mavlink-server or even voxl-vision-hub and use that to create an RC_CHANNELS_OVERRIDE Mavlink message to send to the external FC. I'm just brainstorming here and can't really provide much more support than offering some high level ideas. -
@Jetson-Nano I think what you are trying to do is entirely possible. But it isn't anything we have ever tried. So I'm just throwing out some ideas that could maybe help you develop this. Or maybe you have some better ideas. One possibility, that I was referring to above, is to create a new program running on the Linux applications processor. It would have to use the libqrb5165-io library to get access to the UART on J19 that is mapped to the SLPI DSP. Another idea is to actually run PX4 on VOXL 2 and either use
px4-listenerto monitor the input_rc topic or monitor the RC_CHANNELS Mavlink message via voxl-mavlink-server or even voxl-vision-hub and use that to create an RC_CHANNELS_OVERRIDE Mavlink message to send to the external FC. I'm just brainstorming here and can't really provide much more support than offering some high level ideas.@Eric-Katzfey Thank you for reverting back. I would like to try out the voxl-mavlink-server approach. I had question with regards to that, how will i be able to get the DATA
(RC_CHANNELS) from the mavlink-server. Any ideas regarding that.
@Alex-Kushleyev -
@Eric-Katzfey Thank you for reverting back. I would like to try out the voxl-mavlink-server approach. I had question with regards to that, how will i be able to get the DATA
(RC_CHANNELS) from the mavlink-server. Any ideas regarding that.
@Alex-Kushleyev
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login