Drone losing position / crashing in Offboard mode
-
And I have one more question @Eric-Katzfey , I have to start the mavlink stream everytime. Is there a way to start the mavlink stream as soon the system is powered on?
-
@Jetson-Nano Yes, there is a way to do that. Probably best to consult the PX4 documentation or ask on the PX4 forum for best way to do that on a Cube Orange.
-
@Eric-Katzfey What about the previous question I asked?
-
@Jetson-Nano I really don't know what would cause that lag. You say it goes away if you wait awhile. How long do you have to wait for that to happen? And what is the baud rate of the UART that connects the CUBE Orange to VOXL 2? It's possible that the UART has too much data going over it and needs a higher baudrate.
-
@Eric-Katzfey The baudrate is 921600, sometimes I'll have to wait for more than 5 minutes and sometimes within seconds it will be ready to fly with required Hz
-
@Jetson-Nano Part of the startup sequence when running with QGC or MP is to upload a full set of parameters. There are hundreds of parameters and this can take quite a while to complete. While this is happening the serial link is inundated with PARAM_VALUE mavlink messages. Once that has been completed then the link will have much less traffic. While it is laggy you can look at the mavlink console and see if it is receiving those PARAM_VALUE messages. That is a possible reason.
-
J Jetson Nano referenced this topic on
-
@Eric-Katzfey I'm currently integrating VOXL2 with Flight Core V2.
PX4 version: v1.14.3 (from modalAI fork)
I am trying to use offboard mode and do
figure-eight, but the problem I'm facing is, whenever I switch to offboard, the drone sometimes moves randomly.Once I reboot the FC once and start flying from same position, and then switching to
offboard, I observe that the drone does figure 8, but loses height sequentially and drifts over the ground and crashes after a few cycles.For height estimation, I rely on using a Rangefinder.
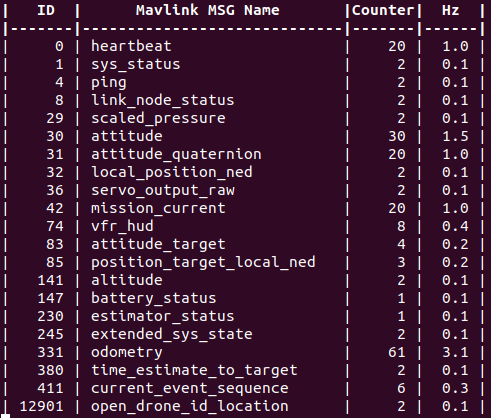
Also, when I run,
voxl-inspect-mavlink mavlink_onboardI'm not able to observe, the #331 ODOMETRY message.
-
@Jetson-Nano What happens if you don't use the rangefinder? If VIO is working then you get the height from that.
-
@Eric-Katzfey Thanks for reverting back.
I had tried earlier disabling the Rangefinder and relying only on VIO.
VIO works fine in feature rich environment, when it crosses low-feature environment, there is a random motion of system which could observed serving the main reason for using external Rangefinder.
Also, height estimation goes off even if the drone does
figure-eightwithin offboard, height estimation goes off.Is there any way I can view the #331 ODOMETRY message being pushed from FC to Compute?
-
Hey @Eric-Katzfey I was able to solve it. I was able to shift the drone to
offboard-mode, the drone doesn't drift away. Invoxl-vision-hub, I have the set the parameter tofigure_eight.I'm getting the stream to VOXL2 from Flight Core v2. I had to run it on 2 different ports.
mavlink stream -r 30 -s ODOMETRY -d /dev/ttyS4
mavlink stream -r 30 -s ODOMETRY -d /dev/ttyS6
But I'm getting the #331 odometry message when using onlyttyS6port.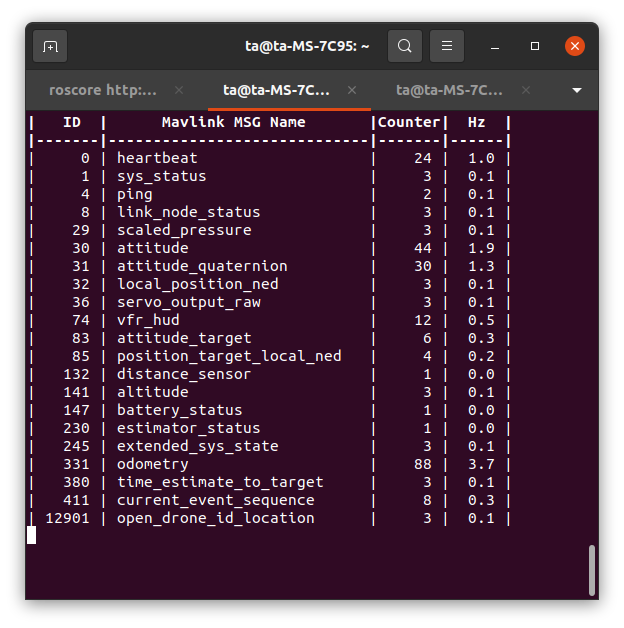
Now the drone is able to
figure_eightloop without loosing height estimates.