ROS2 bag /qvio
-
Hi! I'm using ros2 bag for a project. For now I have successfully recevied and used Imu, image and pointcloud data. Because inaccuracy of imu I would like to use qvio data.
Is there way of ros2 bag recording qvio?/qvio topic publish 2 different messages - PoseStamped and odometry I haven't found any working command for recording qvio. Is there any? I would prefer PoseStamped.
-
Hi! I'm using ros2 bag for a project. For now I have successfully recevied and used Imu, image and pointcloud data. Because inaccuracy of imu I would like to use qvio data.
Is there way of ros2 bag recording qvio?/qvio topic publish 2 different messages - PoseStamped and odometry I haven't found any working command for recording qvio. Is there any? I would prefer PoseStamped.
@Aapo_Rei Hi Aapo, all of the source code is open so folks can extend to suit their needs. We're happy to take merge requests. You could start by looking here: https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-mpa-to-ros2/-/blob/master/colcon_ws/src/voxl_mpa_to_ros2/src/interface_manager.cpp?ref_type=heads
-
@Moderator said in ROS2 bag /qvio:
@Aapo_Rei Hi Aapo, all of the source code is open so folks can extend to suit their needs. We're happy to take merge requests. You could start by looking here: https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-mpa-to-ros2/-/blob/master/colcon_ws/src/voxl_mpa_to_ros2/src/interface_manager.cpp?ref_type=heads
Reply
@Aapo_Rei I am a bit confused by your question as qvio technically is a position in space or a combination or PoseStamped and Odometry - so what exactly are you trying to record from qvio that is not in the ros2 message?
-
@Moderator said in ROS2 bag /qvio:
@Aapo_Rei Hi Aapo, all of the source code is open so folks can extend to suit their needs. We're happy to take merge requests. You could start by looking here: https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-mpa-to-ros2/-/blob/master/colcon_ws/src/voxl_mpa_to_ros2/src/interface_manager.cpp?ref_type=heads
Reply
@Aapo_Rei I am a bit confused by your question as qvio technically is a position in space or a combination or PoseStamped and Odometry - so what exactly are you trying to record from qvio that is not in the ros2 message?
@Zachary-Lowell-0 Thanks for the reply!
I ment that I can't record qvio data same way as the other msgs. Trying to record qvio gives me error code like below.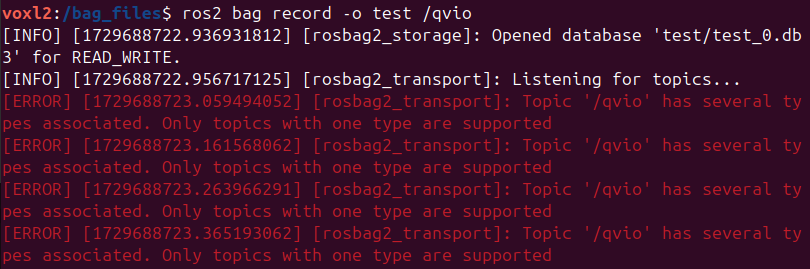
Still the data can be view like this "ros2 topic echo /qvio geometry_msgs/msg/PoseStamped" And I thought you cloud record this same data, but haven't found a way.
My question is - is there working way to record ros2 bag for qvio and what is it? I'm asking before I start making ros2 node for that.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login