Starling drone shut down mid flight
-
I attempted to connect to the drone, but initially, the connection failed. After some time, I was able to establish the connection. While flying the Starling drone in offboard mode, it suddenly shut down mid-flight and fell to the ground. Following the incident, I was unable to connect to the drone using ADB or Wi-Fi for some time. What could be the reason for this, and what can I do to solve this issue?
-
I attempted to connect to the drone, but initially, the connection failed. After some time, I was able to establish the connection. While flying the Starling drone in offboard mode, it suddenly shut down mid-flight and fell to the ground. Following the incident, I was unable to connect to the drone using ADB or Wi-Fi for some time. What could be the reason for this, and what can I do to solve this issue?
@Shivam-Sehgal , are you able to ADB into VOXL2 and download the PX4 log from the flight?
Also, what SDK version were you using?
-
@Shivam-Sehgal , are you able to ADB into VOXL2 and download the PX4 log from the flight?
Also, what SDK version were you using?
@Alex-Kushleyev , I am unable to ADB into VOXL2 today but I did download the flight controller log file after I was able to log in again that day from QGC.
https://review.px4.io/plot_app?log=81e3f3cc-1cf2-419a-8202-073a9dd46c3e link to flight review for the log file. I don't remember the sdk version.
-
@Shivam-Sehgal , are you able to ADB into VOXL2 and download the PX4 log from the flight?
Also, what SDK version were you using?
@Alex-Kushleyev My Voxl SDK version is 1.1.2.
------------------------------------------------------------------------------- system-image: 1.7.1-M0054-14.1a-perf-nightly-20231025 kernel: #1 SMP PREEMPT Thu Oct 26 03:25:38 UTC 2023 4.19.125 -------------------------------------------------------------------------------- hw version: M0054 -------------------------------------------------------------------------------- voxl-suite: 1.1.2 -------------------------------------------------------------------------------- Packages: Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/sdk-1.1/binary-arm64/ Last Updated: 2024-05-07 02:01:12 List: libmodal-cv 0.4.0 libmodal-exposure 0.1.0 libmodal-journal 0.2.2 libmodal-json 0.4.3 libmodal-pipe 2.9.2 libqrb5165-io 0.4.2 libvoxl-cci-direct 0.2.1 libvoxl-cutils 0.1.1 mv-voxl 0.1-r0 qrb5165-bind 0.1-r0 qrb5165-dfs-server 0.2.0 qrb5165-imu-server 1.0.1 qrb5165-rangefinder-server 0.1.1 qrb5165-slpi-test-sig 01-r0 qrb5165-system-tweaks 0.2.3 qrb5165-tflite 2.8.0-2 voxl-bind-spektrum 0.1.0 voxl-camera-calibration 0.5.3 voxl-camera-server 1.8.9.1 voxl-configurator 0.4.8 voxl-cpu-monitor 0.4.7 voxl-docker-support 1.3.0 voxl-elrs 0.1.3 voxl-esc 1.3.7 voxl-feature-tracker 0.3.2 voxl-flow-server 0.3.3 voxl-gphoto2-server 0.0.10 voxl-jpeg-turbo 2.1.3-5 voxl-lepton-server 1.2.0 voxl-libgphoto2 0.0.4 voxl-libuvc 1.0.7 voxl-logger 0.3.5 voxl-mavcam-manager 0.5.3 voxl-mavlink 0.1.1 voxl-mavlink-server 1.3.2 voxl-microdds-agent 2.4.1-0 voxl-modem 1.0.8 voxl-mongoose 7.7.0-1 voxl-mpa-to-ros 0.3.7 voxl-mpa-to-ros2 0.0.2 voxl-mpa-tools 1.1.3 voxl-neopixel-manager 0.0.3 voxl-opencv 4.5.5-2 voxl-portal 0.6.3 voxl-px4 1.14.0-2.0.63 voxl-px4-imu-server 0.1.2 voxl-px4-params 0.3.3 voxl-qvio-server 1.0.0 voxl-remote-id 0.0.9 voxl-ros2-foxy 0.0.1 voxl-streamer 0.7.4 voxl-suite 1.1.2 voxl-tag-detector 0.0.4 voxl-tflite-server 0.3.2 voxl-utils 1.3.3 voxl-uvc-server 0.1.6 voxl-vision-hub 1.7.3 voxl2-system-image 1.7.1-r0 voxl2-wlan 1.0-r0 -------------------------------------------------------------------------------- -
@Alex-Kushleyev My Voxl SDK version is 1.1.2.
------------------------------------------------------------------------------- system-image: 1.7.1-M0054-14.1a-perf-nightly-20231025 kernel: #1 SMP PREEMPT Thu Oct 26 03:25:38 UTC 2023 4.19.125 -------------------------------------------------------------------------------- hw version: M0054 -------------------------------------------------------------------------------- voxl-suite: 1.1.2 -------------------------------------------------------------------------------- Packages: Repo: http://voxl-packages.modalai.com/ ./dists/qrb5165/sdk-1.1/binary-arm64/ Last Updated: 2024-05-07 02:01:12 List: libmodal-cv 0.4.0 libmodal-exposure 0.1.0 libmodal-journal 0.2.2 libmodal-json 0.4.3 libmodal-pipe 2.9.2 libqrb5165-io 0.4.2 libvoxl-cci-direct 0.2.1 libvoxl-cutils 0.1.1 mv-voxl 0.1-r0 qrb5165-bind 0.1-r0 qrb5165-dfs-server 0.2.0 qrb5165-imu-server 1.0.1 qrb5165-rangefinder-server 0.1.1 qrb5165-slpi-test-sig 01-r0 qrb5165-system-tweaks 0.2.3 qrb5165-tflite 2.8.0-2 voxl-bind-spektrum 0.1.0 voxl-camera-calibration 0.5.3 voxl-camera-server 1.8.9.1 voxl-configurator 0.4.8 voxl-cpu-monitor 0.4.7 voxl-docker-support 1.3.0 voxl-elrs 0.1.3 voxl-esc 1.3.7 voxl-feature-tracker 0.3.2 voxl-flow-server 0.3.3 voxl-gphoto2-server 0.0.10 voxl-jpeg-turbo 2.1.3-5 voxl-lepton-server 1.2.0 voxl-libgphoto2 0.0.4 voxl-libuvc 1.0.7 voxl-logger 0.3.5 voxl-mavcam-manager 0.5.3 voxl-mavlink 0.1.1 voxl-mavlink-server 1.3.2 voxl-microdds-agent 2.4.1-0 voxl-modem 1.0.8 voxl-mongoose 7.7.0-1 voxl-mpa-to-ros 0.3.7 voxl-mpa-to-ros2 0.0.2 voxl-mpa-tools 1.1.3 voxl-neopixel-manager 0.0.3 voxl-opencv 4.5.5-2 voxl-portal 0.6.3 voxl-px4 1.14.0-2.0.63 voxl-px4-imu-server 0.1.2 voxl-px4-params 0.3.3 voxl-qvio-server 1.0.0 voxl-remote-id 0.0.9 voxl-ros2-foxy 0.0.1 voxl-streamer 0.7.4 voxl-suite 1.1.2 voxl-tag-detector 0.0.4 voxl-tflite-server 0.3.2 voxl-utils 1.3.3 voxl-uvc-server 0.1.6 voxl-vision-hub 1.7.3 voxl2-system-image 1.7.1-r0 voxl2-wlan 1.0-r0 --------------------------------------------------------------------------------@Shivam-Sehgal , I have reviewed the log and unfortunately do not see any issues. The log terminates prematurely (before the crash), which may suggest that the PX4 process crashed (as opposed to a sensor issue or ESC issue, causing motor to stop, for example). But this is just a guess.
SDK 1.1.2 is quite old, we recommend using latest SDK if possible, since we always make improvements and fixes.
My recommendation is to get the vehicle back up and running and try to migrate to SDK 1.3.
-
@Shivam-Sehgal , I have reviewed the log and unfortunately do not see any issues. The log terminates prematurely (before the crash), which may suggest that the PX4 process crashed (as opposed to a sensor issue or ESC issue, causing motor to stop, for example). But this is just a guess.
SDK 1.1.2 is quite old, we recommend using latest SDK if possible, since we always make improvements and fixes.
My recommendation is to get the vehicle back up and running and try to migrate to SDK 1.3.
@Alex-Kushleyev i can update the system but I am unable to connect to voxl 2. How can I update the system?
-
@Alex-Kushleyev i can update the system but I am unable to connect to voxl 2. How can I update the system?
@Shivam-Sehgal , quick question.. So after the crash, were you able to connect to VOXL2 (how? ADB or wifi) to get the log from it? And now it no longer connects using ADB?
Here is unbricking procedure for VOX2 https://docs.modalai.com/voxl2-unbricking/, however that is typically done when a software update fails or the file system.
Can you please clarify whether you were able to use VOXL2 between the time after crash and now?
-
@Shivam-Sehgal , quick question.. So after the crash, were you able to connect to VOXL2 (how? ADB or wifi) to get the log from it? And now it no longer connects using ADB?
Here is unbricking procedure for VOX2 https://docs.modalai.com/voxl2-unbricking/, however that is typically done when a software update fails or the file system.
Can you please clarify whether you were able to use VOXL2 between the time after crash and now?
@Alex-Kushleyev Yes I was able to connect to drone both via wifi and adb that day, then next day I wasn't able to do so.
(Some Observation if it helps)
Also, I have 3 other starling drone in all of them there are four blue lights on the ESC that constantly flash.
In the one that does not connect there is no flashing. -
@Shivam-Sehgal , quick question.. So after the crash, were you able to connect to VOXL2 (how? ADB or wifi) to get the log from it? And now it no longer connects using ADB?
Here is unbricking procedure for VOX2 https://docs.modalai.com/voxl2-unbricking/, however that is typically done when a software update fails or the file system.
Can you please clarify whether you were able to use VOXL2 between the time after crash and now?
@Alex-Kushleyev should I follow the unbricking process?
-
@Alex-Kushleyev should I follow the unbricking process?
@Shivam-Sehgal , Yes, you should try it, however i am not sure whether the recovery attempt will be successful. Typically unbricking is required when something goes wrong during SDK update or something like that, when the system is left in incomplete state. In your case, the drone was flying and stopped responding after a crash. The fact that it shut off during flight could mean there was a pre-existing issue (before the crash) which may be causing the board not to boot now. However, it is worth to try the unbricking and if does not work, please contact our RMA department, they will help you out.
Alex
-
@Shivam-Sehgal , Yes, you should try it, however i am not sure whether the recovery attempt will be successful. Typically unbricking is required when something goes wrong during SDK update or something like that, when the system is left in incomplete state. In your case, the drone was flying and stopped responding after a crash. The fact that it shut off during flight could mean there was a pre-existing issue (before the crash) which may be causing the board not to boot now. However, it is worth to try the unbricking and if does not work, please contact our RMA department, they will help you out.
Alex
@Alex-Kushleyev I did not unbrick it it had opened the voxl2 board and I was able to connect to it, then when I closed it it did not connect again.
What I found out is when the hires and tracking camera are connected to the board I am unable to connect to the drone. What could be the reason for this? -
@Alex-Kushleyev I did not unbrick it it had opened the voxl2 board and I was able to connect to it, then when I closed it it did not connect again.
What I found out is when the hires and tracking camera are connected to the board I am unable to connect to the drone. What could be the reason for this?@Shivam-Sehgal , most likely one of the camera flex cables is broken and it is shorting one of the power rails to ground, which prevents voxl2 from booting. I suggest trying to connect one camera at a time to narrow down the issue to a specific camera and then inspect the “bad” camera’s flex cable or extension flex cable.
-
@Shivam-Sehgal , most likely one of the camera flex cables is broken and it is shorting one of the power rails to ground, which prevents voxl2 from booting. I suggest trying to connect one camera at a time to narrow down the issue to a specific camera and then inspect the “bad” camera’s flex cable or extension flex cable.
@Alex-Kushleyev I connected both cameras to the other connector on which tof sensor was connected. I could connect to the board. Also the tof sensor worked on the other board.
But I could not connect to the tracking and hires camera, I could only connected to TOF sensor.
-
@Alex-Kushleyev I connected both cameras to the other connector on which tof sensor was connected. I could connect to the board. Also the tof sensor worked on the other board.
But I could not connect to the tracking and hires camera, I could only connected to TOF sensor.
@Shivam-Sehgal I connected the cameras back in their basic configration that it is shipped with.
Then I ran voxl-camera-cameras and set it to 06 - D0005 Starling pmd-tof imx214 hires ov7251 tracking.
voxl2:/$ voxl-configure-cameras Available camera config IDs are as follows: 01 - ov7251 tracking ov7251 stereo 02 - ov7251 tracking 03 - ov7251 tracking ov7251 stereo imx214 hires 04 - ov7251 tracking imx214 hires 05 - pmd-tof ov7251 tracking 06 - D0005 Starling pmd-tof imx214 hires ov7251 tracking 08 - imx214 09 - pmd-tof 10 - ov7251 stereo 11 - D0006 Sentinel 12 - ov9782 stereo 13 - ov9782 stereo imx214 hires 14 - ov9782 stereo pmd-tof ov7251 tracking (copy) 15 - D0008 dual 9782 tracking 16 - pmd-tof ov7251 dual tracking imx214 hires 17 - D0010 pmd-tof imx412 hires ov7251 tracking ov9782 stereo 18 - D0008 triple ov9782 19 - D0005 without tof imx214 hires ov7251 tracking 20 - D0011 imx412 hires ar0144 tracking 21 - old C6 22 - D0013 imx412 flipped ov7251 23 - D0010 without stereo C - use user-defined custom camera config in (/data/modalai/custom_camera_config.txt) q - Quit The Wizard selection: 6 Selected numerical camera config Camera Configuration: 6 camera server config helper list: tof:pmd-tof:0: hires:imx214:1: tracking:ov7251:2: driver binary list: /usr/share/modalai/chi-cdk/irs1645/com.qti.sensormodule.irs1645_0.bin /usr/share/modalai/chi-cdk/imx214/com.qti.sensormodule.imx214_2.bin /usr/share/modalai/chi-cdk/ov7251/com.qti.sensormodule.ov7251_3.bin calling camera-server-config-helper tof:pmd-tof:0: hires:imx214:1: tracking:ov7251:2: detected system image 1.7.1 using new imx214 defaults successfully wrote this camera config to disk: ================================================================= configuration for 3 cameras: cam #0 name: tof sensor type: pmd-tof isEnabled: 1 camId: 0 camId2: -1 fps: 5 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 224 pre_height: 1557 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: off standby_enabled: 0 decimator: 5 independent_exposure:0 cam #1 name: hires sensor type: imx214 isEnabled: 1 camId: 1 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 0 pre_width: 640 pre_height: 480 en_raw_preview: 0 en_small_video: 1 small_video_width: 1024 small_video_height: 768 en_large_video: 1 large_video_width: 4208 large_video_height: 3120 en_snapshot: 1 snap_width: 4208 snap_height: 3120 ae_mode: isp standby_enabled: 0 decimator: 1 independent_exposure:0 cam #2 name: tracking sensor type: ov7251 isEnabled: 1 camId: 2 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 640 pre_height: 480 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: lme_msv standby_enabled: 0 decimator: 1 independent_exposure:0 ================================================================= camera_server_config_helper is done copying required camera drivers in place /usr/share/modalai/chi-cdk/irs1645/com.qti.sensormodule.irs1645_0.bin /usr/share/modalai/chi-cdk/imx214/com.qti.sensormodule.imx214_2.bin /usr/share/modalai/chi-cdk/ov7251/com.qti.sensormodule.ov7251_3.bin enabling voxl-camera-server ------------------------------------------------------------------ Done Configuring Cameras Please power cycle VOXL to load new drivers camera server will start on next reboot ------------------------------------------------------------------After this I manually restarted the voxl-camera-server and the connection broke after the output below.
voxl2:/$ voxl-camera-server detected system image 1.7.1 using new imx214 defaults ================================================================= configuration for 3 cameras: cam #0 name: tof sensor type: pmd-tof isEnabled: 1 camId: 0 camId2: -1 fps: 5 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 224 pre_height: 1557 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: off standby_enabled: 0 decimator: 5 independent_exposure:0 cam #1 name: hires sensor type: imx214 isEnabled: 1 camId: 1 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 0 pre_width: 640 pre_height: 480 en_raw_preview: 0 en_small_video: 1 small_video_width: 1024 small_video_height: 768 en_large_video: 1 large_video_width: 4208 large_video_height: 3120 en_snapshot: 1 snap_width: 4208 snap_height: 3120 ae_mode: isp standby_enabled: 0 decimator: 1 independent_exposure:0 cam #2 name: tracking sensor type: ov7251 isEnabled: 1 camId: 2 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 640 pre_height: 480 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: lme_msv standby_enabled: 0 decimator: 1 independent_exposure:0 ================================================================= GPS server Connected Starting Camera: tof (id #0) Using gain limits min: 54 max: 8000 gbm_create_device(156): Info: backend name is: msm_drm Starting Camera: hires (id #1) Using gain limits min: 54 max: 431 WARNING: Port Def 0: Count Min: 8 Count Actual: 16 Size: 0x180000 Buffers Contiguous: Yes Buffer Alignment: 0 WARNING: Port Def 1: Count Min: 4 Count Actual: 16 Size: 0x5a0000 Buffers Contiguous: No Buffer Alignment: 0 gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm WARNING: Port Def 0: Count Min: 8 Count Actual: 16 Size: 0x17a0000 Buffers Contiguous: Yes Buffer Alignment: 0 WARNING: Port Def 1: Count Min: 4 Count Actual: 16 Size: 0x5ec000 Buffers Contiguous: No Buffer Alignment: 0 gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm Starting Camera: tracking (id #2) Using gain limits min: 54 max: 3451 setting ov7251 BLC register for cam id 2 ------ voxl-camera-server: Started 3 of 3 cameras ------ voxl-camera-server: Camera server is now running -
@Shivam-Sehgal I connected the cameras back in their basic configration that it is shipped with.
Then I ran voxl-camera-cameras and set it to 06 - D0005 Starling pmd-tof imx214 hires ov7251 tracking.
voxl2:/$ voxl-configure-cameras Available camera config IDs are as follows: 01 - ov7251 tracking ov7251 stereo 02 - ov7251 tracking 03 - ov7251 tracking ov7251 stereo imx214 hires 04 - ov7251 tracking imx214 hires 05 - pmd-tof ov7251 tracking 06 - D0005 Starling pmd-tof imx214 hires ov7251 tracking 08 - imx214 09 - pmd-tof 10 - ov7251 stereo 11 - D0006 Sentinel 12 - ov9782 stereo 13 - ov9782 stereo imx214 hires 14 - ov9782 stereo pmd-tof ov7251 tracking (copy) 15 - D0008 dual 9782 tracking 16 - pmd-tof ov7251 dual tracking imx214 hires 17 - D0010 pmd-tof imx412 hires ov7251 tracking ov9782 stereo 18 - D0008 triple ov9782 19 - D0005 without tof imx214 hires ov7251 tracking 20 - D0011 imx412 hires ar0144 tracking 21 - old C6 22 - D0013 imx412 flipped ov7251 23 - D0010 without stereo C - use user-defined custom camera config in (/data/modalai/custom_camera_config.txt) q - Quit The Wizard selection: 6 Selected numerical camera config Camera Configuration: 6 camera server config helper list: tof:pmd-tof:0: hires:imx214:1: tracking:ov7251:2: driver binary list: /usr/share/modalai/chi-cdk/irs1645/com.qti.sensormodule.irs1645_0.bin /usr/share/modalai/chi-cdk/imx214/com.qti.sensormodule.imx214_2.bin /usr/share/modalai/chi-cdk/ov7251/com.qti.sensormodule.ov7251_3.bin calling camera-server-config-helper tof:pmd-tof:0: hires:imx214:1: tracking:ov7251:2: detected system image 1.7.1 using new imx214 defaults successfully wrote this camera config to disk: ================================================================= configuration for 3 cameras: cam #0 name: tof sensor type: pmd-tof isEnabled: 1 camId: 0 camId2: -1 fps: 5 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 224 pre_height: 1557 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: off standby_enabled: 0 decimator: 5 independent_exposure:0 cam #1 name: hires sensor type: imx214 isEnabled: 1 camId: 1 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 0 pre_width: 640 pre_height: 480 en_raw_preview: 0 en_small_video: 1 small_video_width: 1024 small_video_height: 768 en_large_video: 1 large_video_width: 4208 large_video_height: 3120 en_snapshot: 1 snap_width: 4208 snap_height: 3120 ae_mode: isp standby_enabled: 0 decimator: 1 independent_exposure:0 cam #2 name: tracking sensor type: ov7251 isEnabled: 1 camId: 2 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 640 pre_height: 480 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: lme_msv standby_enabled: 0 decimator: 1 independent_exposure:0 ================================================================= camera_server_config_helper is done copying required camera drivers in place /usr/share/modalai/chi-cdk/irs1645/com.qti.sensormodule.irs1645_0.bin /usr/share/modalai/chi-cdk/imx214/com.qti.sensormodule.imx214_2.bin /usr/share/modalai/chi-cdk/ov7251/com.qti.sensormodule.ov7251_3.bin enabling voxl-camera-server ------------------------------------------------------------------ Done Configuring Cameras Please power cycle VOXL to load new drivers camera server will start on next reboot ------------------------------------------------------------------After this I manually restarted the voxl-camera-server and the connection broke after the output below.
voxl2:/$ voxl-camera-server detected system image 1.7.1 using new imx214 defaults ================================================================= configuration for 3 cameras: cam #0 name: tof sensor type: pmd-tof isEnabled: 1 camId: 0 camId2: -1 fps: 5 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 224 pre_height: 1557 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: off standby_enabled: 0 decimator: 5 independent_exposure:0 cam #1 name: hires sensor type: imx214 isEnabled: 1 camId: 1 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 0 pre_width: 640 pre_height: 480 en_raw_preview: 0 en_small_video: 1 small_video_width: 1024 small_video_height: 768 en_large_video: 1 large_video_width: 4208 large_video_height: 3120 en_snapshot: 1 snap_width: 4208 snap_height: 3120 ae_mode: isp standby_enabled: 0 decimator: 1 independent_exposure:0 cam #2 name: tracking sensor type: ov7251 isEnabled: 1 camId: 2 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 640 pre_height: 480 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: lme_msv standby_enabled: 0 decimator: 1 independent_exposure:0 ================================================================= GPS server Connected Starting Camera: tof (id #0) Using gain limits min: 54 max: 8000 gbm_create_device(156): Info: backend name is: msm_drm Starting Camera: hires (id #1) Using gain limits min: 54 max: 431 WARNING: Port Def 0: Count Min: 8 Count Actual: 16 Size: 0x180000 Buffers Contiguous: Yes Buffer Alignment: 0 WARNING: Port Def 1: Count Min: 4 Count Actual: 16 Size: 0x5a0000 Buffers Contiguous: No Buffer Alignment: 0 gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm WARNING: Port Def 0: Count Min: 8 Count Actual: 16 Size: 0x17a0000 Buffers Contiguous: Yes Buffer Alignment: 0 WARNING: Port Def 1: Count Min: 4 Count Actual: 16 Size: 0x5ec000 Buffers Contiguous: No Buffer Alignment: 0 gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm Starting Camera: tracking (id #2) Using gain limits min: 54 max: 3451 setting ov7251 BLC register for cam id 2 ------ voxl-camera-server: Started 3 of 3 cameras ------ voxl-camera-server: Camera server is now running@Shivam-Sehgal , sorry, can we please take one step back and clarify something..
Does the VOXL2 board now boot with all the cameras plugged into the original configuration?
Also, when you say
After this I manually restarted the voxl-camera-server and the connection broke after the output below.-- which connection are you referring to?If you are able to connect all cameras to their original slots, but something is still not working, i suggest that you test with only one camera enabled at a time and figure out if there is still one camera that is not working.
Alex
-
@Shivam-Sehgal , sorry, can we please take one step back and clarify something..
Does the VOXL2 board now boot with all the cameras plugged into the original configuration?
Also, when you say
After this I manually restarted the voxl-camera-server and the connection broke after the output below.-- which connection are you referring to?If you are able to connect all cameras to their original slots, but something is still not working, i suggest that you test with only one camera enabled at a time and figure out if there is still one camera that is not working.
Alex
@Alex-Kushleyev I hope this clears somethings out, its confusing for me too.
no it does not boot now with all the camera's plugged in original physical connections.
It was not about the physical connections, but when the camera service started then the connection broke.First I shifted the physical connections of the camera's as mentioned above, after which I could boot but the hires and tracking camera did not work or start. (https://forum.modalai.com/post/19383)
Then restored the original physical connnections, set the voxl-configure-camera to it original configuration it's shipped with and then restarted the voxl-camera-server.
When I started the service this the output of it, after this output the adb and ssh connection broke and I was unable to connection to the voxl2 board.
voxl2:/$ voxl-camera-server detected system image 1.7.1 using new imx214 defaults ================================================================= configuration for 3 cameras: cam #0 name: tof sensor type: pmd-tof isEnabled: 1 camId: 0 camId2: -1 fps: 5 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 224 pre_height: 1557 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: off standby_enabled: 0 decimator: 5 independent_exposure:0 cam #1 name: hires sensor type: imx214 isEnabled: 1 camId: 1 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 0 pre_width: 640 pre_height: 480 en_raw_preview: 0 en_small_video: 1 small_video_width: 1024 small_video_height: 768 en_large_video: 1 large_video_width: 4208 large_video_height: 3120 en_snapshot: 1 snap_width: 4208 snap_height: 3120 ae_mode: isp standby_enabled: 0 decimator: 1 independent_exposure:0 cam #2 name: tracking sensor type: ov7251 isEnabled: 1 camId: 2 camId2: -1 fps: 30 en_rotate: 0 en_rotate2: 0 en_preview: 1 pre_width: 640 pre_height: 480 en_raw_preview: 1 en_small_video: 0 small_video_width: -1 small_video_height: -1 en_large_video: 0 large_video_width: -1 large_video_height: -1 en_snapshot: 0 snap_width: -1 snap_height: -1 ae_mode: lme_msv standby_enabled: 0 decimator: 1 independent_exposure:0 ================================================================= GPS server Connected Starting Camera: tof (id #0) Using gain limits min: 54 max: 8000 gbm_create_device(156): Info: backend name is: msm_drm Starting Camera: hires (id #1) Using gain limits min: 54 max: 431 WARNING: Port Def 0: Count Min: 8 Count Actual: 16 Size: 0x180000 Buffers Contiguous: Yes Buffer Alignment: 0 WARNING: Port Def 1: Count Min: 4 Count Actual: 16 Size: 0x5a0000 Buffers Contiguous: No Buffer Alignment: 0 gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm WARNING: Port Def 0: Count Min: 8 Count Actual: 16 Size: 0x17a0000 Buffers Contiguous: Yes Buffer Alignment: 0 WARNING: Port Def 1: Count Min: 4 Count Actual: 16 Size: 0x5ec000 Buffers Contiguous: No Buffer Alignment: 0 gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm gbm_create_device(156): Info: backend name is: msm_drm Starting Camera: tracking (id #2) Using gain limits min: 54 max: 3451 setting ov7251 BLC register for cam id 2 ------ voxl-camera-server: Started 3 of 3 cameras ------ voxl-camera-server: Camera server is now running -
@Shivam-Sehgal , sorry, can we please take one step back and clarify something..
Does the VOXL2 board now boot with all the cameras plugged into the original configuration?
Also, when you say
After this I manually restarted the voxl-camera-server and the connection broke after the output below.-- which connection are you referring to?If you are able to connect all cameras to their original slots, but something is still not working, i suggest that you test with only one camera enabled at a time and figure out if there is still one camera that is not working.
Alex
@Alex-Kushleyev I was able to point out maybe it's the hires camera that's the issue. I don't know why but I was singly able to run all other camera's but not the hires camera.
What defect should I look for?
Also, while doing all that I broke the tracking camera's connector and the 2 in 1 camera boards. I will be ordering those. How can I remove the 2 in 1 camera board from the voxl2 board?
-
@Alex-Kushleyev I was able to point out maybe it's the hires camera that's the issue. I don't know why but I was singly able to run all other camera's but not the hires camera.
What defect should I look for?
Also, while doing all that I broke the tracking camera's connector and the 2 in 1 camera boards. I will be ordering those. How can I remove the 2 in 1 camera board from the voxl2 board?
@Alex-Kushleyev any update?
How can can I remove the 2 in 1 camera board? -
@Alex-Kushleyev any update?
How can can I remove the 2 in 1 camera board?@Shivam-Sehgal , sorry for the delay!
Can you please contact our RMA department and send them the pictures of the current state of the board and camera adapter interposers. Our production team can evaluate the pictures. On some products the interposer boards may be glued in place for robustness, so they can suggest best way to handle it.
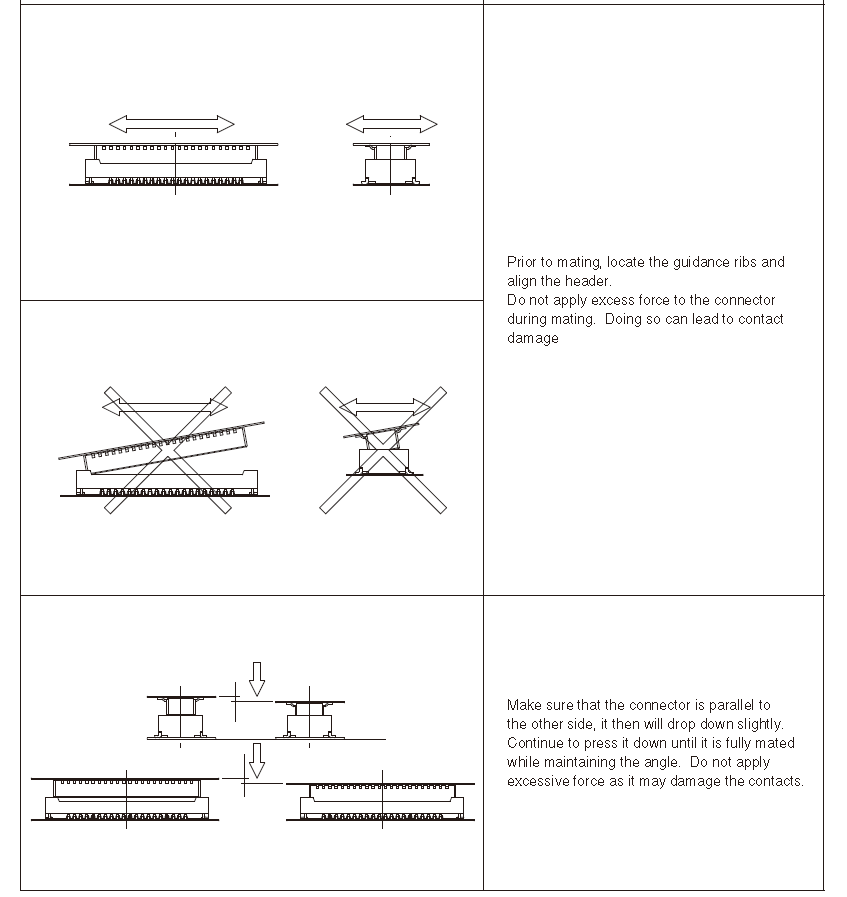
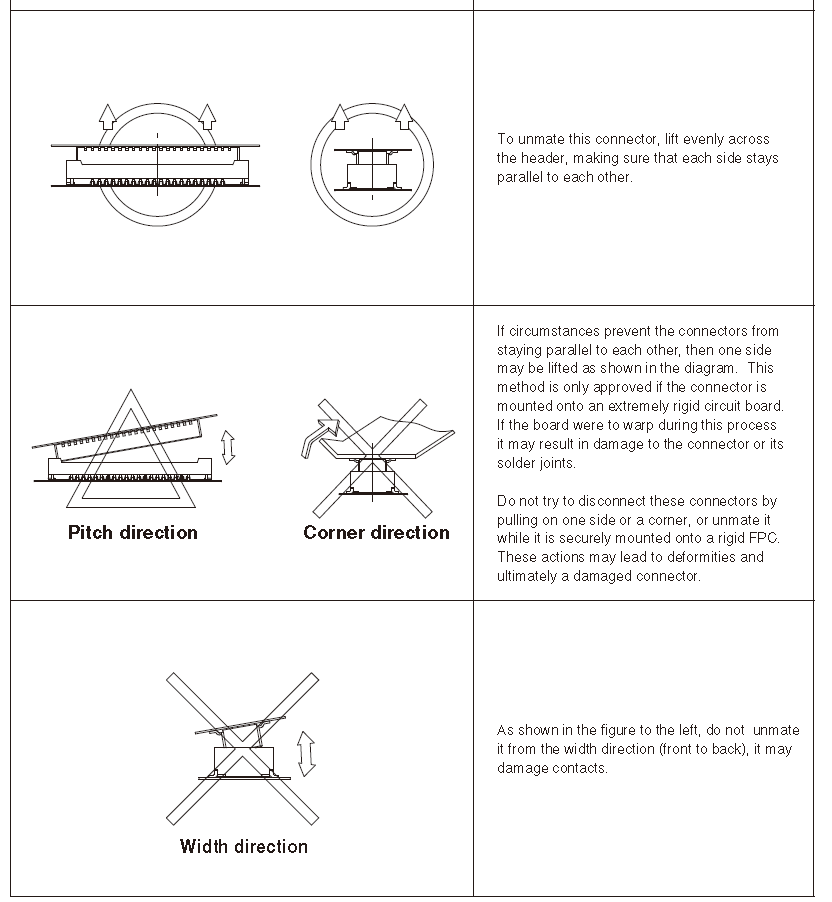
In general, here is a diagram from the Hirose's product manual that shows how typically you should remove these connnectors:
Alex
-
@Shivam-Sehgal , sorry for the delay!
Can you please contact our RMA department and send them the pictures of the current state of the board and camera adapter interposers. Our production team can evaluate the pictures. On some products the interposer boards may be glued in place for robustness, so they can suggest best way to handle it.
In general, here is a diagram from the Hirose's product manual that shows how typically you should remove these connnectors:
Alex
@Alex-Kushleyev Yes Alex, it's glued to the board. Sorry, how can I connect with RMA department?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login