Position mode works, but offboard mode don't
-
Dang! @Dawid-Mościcki to stay in offboard mode you need to consistently be feeding into the PX4 instance setpoint commands or else it will fall back to position mode. Once you changed the offboard_Mode to off, did you restart voxl-vision-hub and or reboot the voxl2?
@Alex-Kushleyev looks like they are having some ESC trouble - any recommendations?
-
Dang! @Dawid-Mościcki to stay in offboard mode you need to consistently be feeding into the PX4 instance setpoint commands or else it will fall back to position mode. Once you changed the offboard_Mode to off, did you restart voxl-vision-hub and or reboot the voxl2?
@Alex-Kushleyev looks like they are having some ESC trouble - any recommendations?
Let's do a quick check of ESCs. Please follow this procedure:
#stop px4 which will conflict with ESC tools systemctl stop voxl-px4 #udpate voxl-esc tools to get the latest (if you have internet connection) apt-get update apt-get install voxl-esc #run ESC scan cd /usr/share/modalai/voxl-esc-tools/ ./voxl-esc-scan.pyThis should detect the modalai ESCs without using PX4. Hopefully there is no issue in doing that, please let us know.
-
Let's do a quick check of ESCs. Please follow this procedure:
#stop px4 which will conflict with ESC tools systemctl stop voxl-px4 #udpate voxl-esc tools to get the latest (if you have internet connection) apt-get update apt-get install voxl-esc #run ESC scan cd /usr/share/modalai/voxl-esc-tools/ ./voxl-esc-scan.pyThis should detect the modalai ESCs without using PX4. Hopefully there is no issue in doing that, please let us know.
@Alex-Kushleyev
I tried to update voxl-esc, but its already newest version ...
I 3d printed drone's skid and fly tested. Drone was having trouble with managing constant altitude, and when trying to land (it was on the ground) somehow flew up to 1.5m and made rapid descend to ground and crashed. Could You help me review this issue ? This is link to logs, params, and esc output on gdrive : linkIt was very strange ... I'm almost certain that we got a bug in params at this point.
Best regards
-
@Alex-Kushleyev
I tried to update voxl-esc, but its already newest version ...
I 3d printed drone's skid and fly tested. Drone was having trouble with managing constant altitude, and when trying to land (it was on the ground) somehow flew up to 1.5m and made rapid descend to ground and crashed. Could You help me review this issue ? This is link to logs, params, and esc output on gdrive : linkIt was very strange ... I'm almost certain that we got a bug in params at this point.
Best regards
@Dawid-Mościcki , i took a look at the log, the ESC performance looks good. I do see the jump at the end, which you described, but it is not clear to my why this happened.
@Zachary-Lowell-0 , any suggestions how to diagnose further? Position and offboard mode use VIO, for x-y-z control, right? (sorry if I am off, not entirely familiar). Can we log and look at VIO quality?
-
@Dawid-Mościcki , i took a look at the log, the ESC performance looks good. I do see the jump at the end, which you described, but it is not clear to my why this happened.
@Zachary-Lowell-0 , any suggestions how to diagnose further? Position and offboard mode use VIO, for x-y-z control, right? (sorry if I am off, not entirely familiar). Can we log and look at VIO quality?
@Alex-Kushleyev Any updates on reviewing this issue ? TBH i'm scared to take off this drone from ground again without finding cause of that strange behavior ...
-
@Alex-Kushleyev said in Position mode works, but offboard mode don't:
for
@Dawid-Mościcki I would say it is safe for now to just fly via position mode or mannual mode and have a kill switch linked to the rC controller. Then you can try swapping over to positio mode. Then try your offboard code.
If the esc chimes when booted then it is getting the right data to control the motors.
-
@Alex-Kushleyev said in Position mode works, but offboard mode don't:
for
@Dawid-Mościcki I would say it is safe for now to just fly via position mode or mannual mode and have a kill switch linked to the rC controller. Then you can try swapping over to positio mode. Then try your offboard code.
If the esc chimes when booted then it is getting the right data to control the motors.
@Zachary-Lowell-0 that crash happened in position mode .......
-
Got it - if you are certain this is an issue in the parameters of PX4, you can reconfigure the MPA to match that of the m500 - just run
voxl-configure-mpaand it will then ask for the drone you are using. Then it will parse through all the config files for the m500 and setup the MPA and px4. Then reboot and everything should be back to factory defaults. -
Got it - if you are certain this is an issue in the parameters of PX4, you can reconfigure the MPA to match that of the m500 - just run
voxl-configure-mpaand it will then ask for the drone you are using. Then it will parse through all the config files for the m500 and setup the MPA and px4. Then reboot and everything should be back to factory defaults.@Zachary-Lowell-0
I did it, and configured drone accordingly to https://docs.modalai.com/flying-with-vio/ so that drone could fly without GPS.
Drone can't fly at all, doesnt respond to stick inputs, logs : https://review.px4.io/plot_app?log=f4e0abee-f370-4932-91c4-2e19aa6e66cf
Vibration metrics is too high, what can we do ?
Please help
-
@Zachary-Lowell-0
I did it, and configured drone accordingly to https://docs.modalai.com/flying-with-vio/ so that drone could fly without GPS.
Drone can't fly at all, doesnt respond to stick inputs, logs : https://review.px4.io/plot_app?log=f4e0abee-f370-4932-91c4-2e19aa6e66cf
Vibration metrics is too high, what can we do ?
Please help@Dawid-Mościcki Any 3D files for this drone are available for download ? For example landing skid ?
-
@Zachary-Lowell-0
I did it, and configured drone accordingly to https://docs.modalai.com/flying-with-vio/ so that drone could fly without GPS.
Drone can't fly at all, doesnt respond to stick inputs, logs : https://review.px4.io/plot_app?log=f4e0abee-f370-4932-91c4-2e19aa6e66cf
Vibration metrics is too high, what can we do ?
Please help@Dawid-Mościcki i don't even know how's that possible https://review.px4.io/plot_app?log=973783b8-6262-46e3-8214-602dce495131
look at actuator FFT -
@Dawid-Mościcki said in Position mode works, but offboard mode don't:
Please help
2 Replies Last reply about 24 hours ago Reply
Hi David - can you reflash your voxl with the most recent SDK and reconfigure the SKU - we need to start from baseline. Let me know.
Zach
-
@Dawid-Mościcki said in Position mode works, but offboard mode don't:
Please help
2 Replies Last reply about 24 hours ago Reply
Hi David - can you reflash your voxl with the most recent SDK and reconfigure the SKU - we need to start from baseline. Let me know.
Zach
@Zachary-Lowell-0 what do You mean by SDK ? Is this guide that i should follow, but without full wipe ? https://docs.modalai.com/sentinel-factory-reset/
-
@Zachary-Lowell-0 what do You mean by SDK ? Is this guide that i should follow, but without full wipe ? https://docs.modalai.com/sentinel-factory-reset/
-
@tom after flashing, i've got problem with calibrating IMU, btw should 2 imu be present ? because i can see only one :
voxl-calibrate-imu-temp
voxl-imu-server currently has no calibration file
Server has IMU0 enabled and available for temperature calibration
WARNING, voxl-fan utility missing, can't turn on fan============================================================================
We're now starting the COLD stage of the calibration.
Please stop all unnecessary services in another terminal, and try your best
to cool the PCB with a fan. Alternatively, start this process on a cold PCB.We will be measuring the static gyro and accel offset as the board heats up.
VOXL must remain completely still through this entire process!
The IMU temperatures will be printed here continuously.Press ENTER to start the heating process when you are happy that the IMUs
are cold enough for the lower bound. 25-35C is a reasonable goal for this.CPU: 36.3C IMU0: 30.4C ^M
WARNING, voxl-fan utility missing, can't turn off fan============================================================================
We're now starting the HOT stage of the calibration. We just turned off
the fan, and started stressing the CPU to heat up the PCB.
This will run automatically for a while collecting data points until enough
data has been collected, something gets too hot, or the timeout is reached.CPU: 57.1C IMU0: 34.9C all imus reached steady state, finishing test
taking sample #2
not enough samples, need at least 3 -
@tom i created backup from /data folder on my pc, but i don't know if this could be helpful
-
@tom i created backup from /data folder on my pc, but i don't know if this could be helpful
@Dawid-Mościcki after importing parameters for vio-indoor without gps from https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-px4-params/-/blob/master/params/v1.14/EKF2_helpers/indoor_vio_missing_gps.params
i only armed vehicle to see vibrations : https://review.px4.io/plot_app?log=c70ab712-72c1-4abf-b954-edda6316bf05
What could I do next ?
-
@tom this is my second try https://review.px4.io/plot_app?log=cba05321-9bb5-42f2-a766-ecfa6ee01f80
-
@tom this is my dump from /data folder : https://drive.google.com/drive/folders/1ZJXCvCcAg81zJolngtlS-Y_re2BjY2pz?usp=sharing
-
@tom this is my dump from /data folder : https://drive.google.com/drive/folders/1ZJXCvCcAg81zJolngtlS-Y_re2BjY2pz?usp=sharing
@Dawid-Mościcki , the gyro / accel noise in your logs is very high.
This looks like the flight board is loose something is causing it to vibrate during flight (any wires or anything connected to VOXL2 that might be flopping around?).
Actuator controls FFT shows
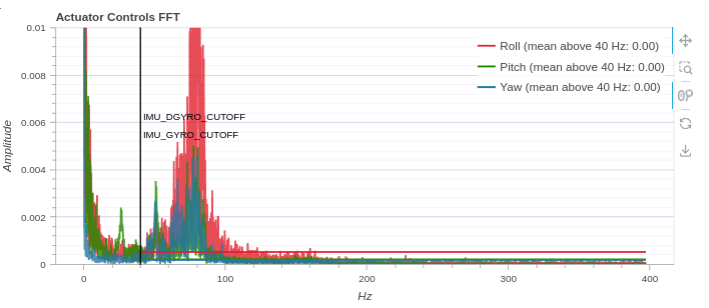
shows noise at about 80 hz (4800rpm) whch maches the average commanded / actual rpm: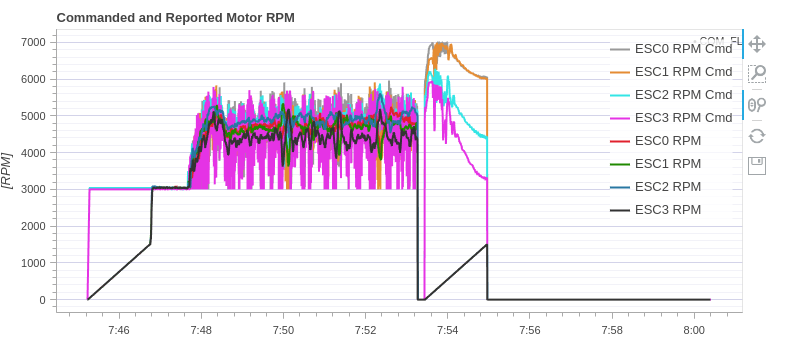
This confirms that the oscillations are coming from propeller vibrations and not oscillations due to high attitude control gains (which would be much lower frequency in the range of 15-20hz).
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login