Arming VOXL, but motors won't spin up
-
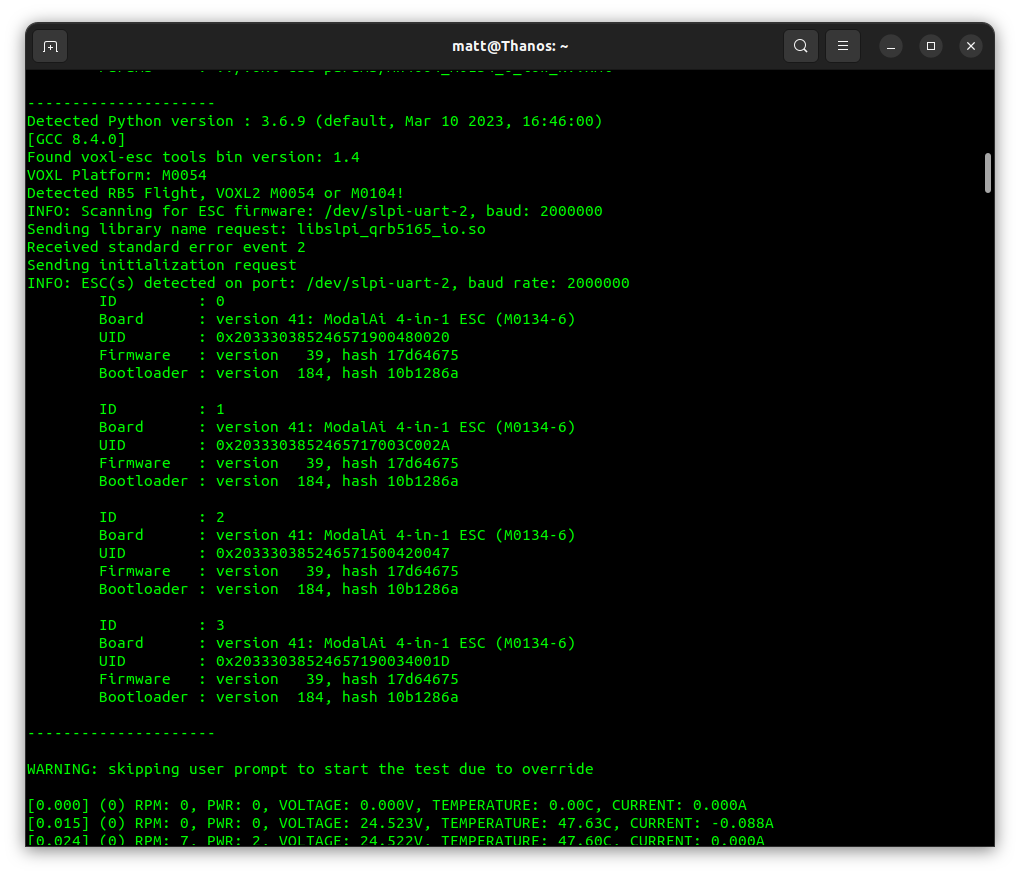
@Matthew-Wellner , the baud rate is 2000000 (2Mbit), not 200K, can you please double check your PX4 params?
Also, some helpful commands:
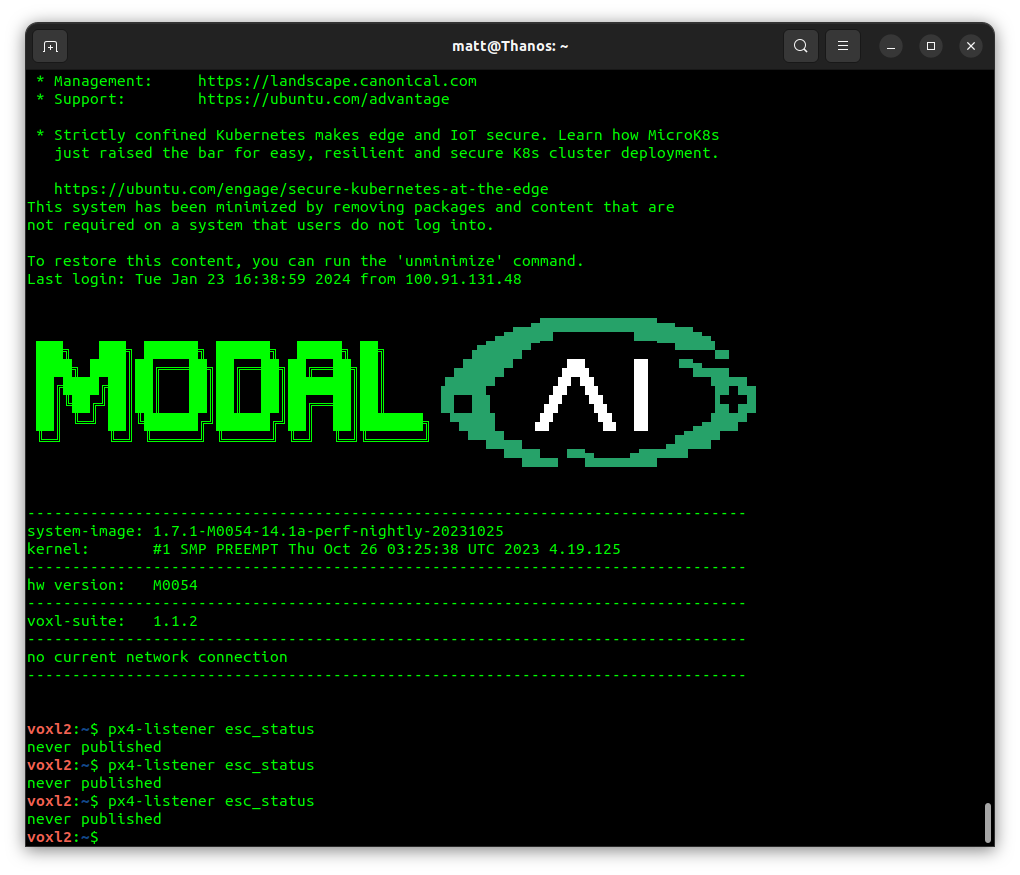
px4-listener esc_statusthis will print out the esc_status message, which the ESC driver should be sending out
Also, if you run voxl-px4 in foreground
systemctl stop voxl-px4 voxl-px4 -dthen you can open another terminal / adb and run:
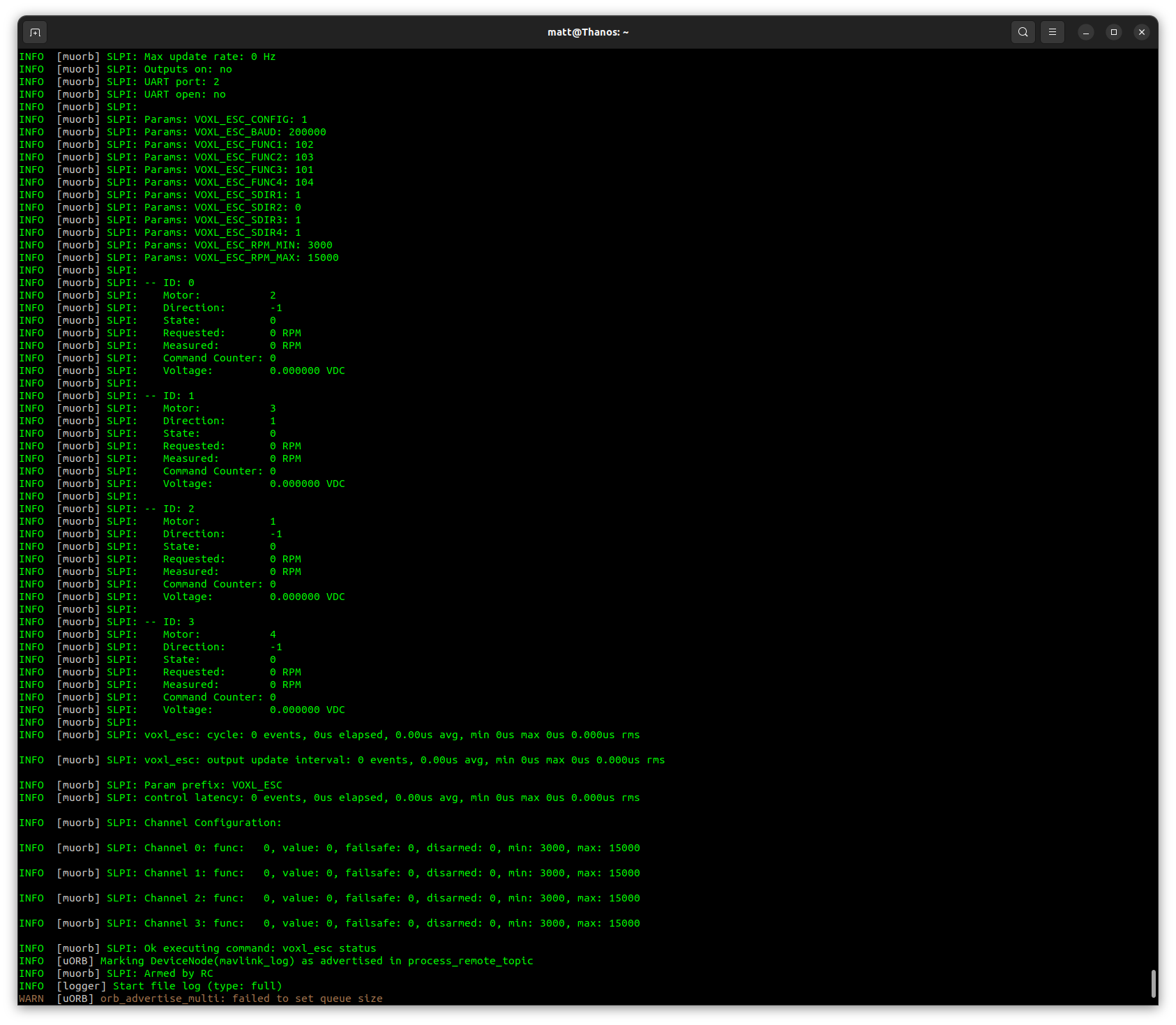
px4-qshell voxl_esc statusthis will print status of voxl esc driver and the params (in the window where voxl-px4 -d is running)
@Alex-Kushleyev This is the results I get from running
px4-listener esc_statusand capturing the results of runningpx4-qshell voxl_esc status.voxl2:/$ px4-listener esc_status TOPIC: esc_status esc_status timestamp: 28243762 (0.002512 seconds ago) counter: 12602 esc_count: 4 esc_connectiontype: 1 esc_online_flags: 15 (0b1111) esc_armed_flags: 15 (0b1111) esc[0] (esc_report): timestamp: 28241456 (0.005087 seconds ago) esc_errorcount: 0 esc_rpm: 0 esc_voltage: 24.03100 esc_current: -0.05600 esc_temperature: 31.00000 failures: 0 esc_address: 3 esc_cmdcount: 56 esc_state: 0 actuator_function: 0 esc_power: 0 esc[1] (esc_report): timestamp: 28242530 (0.004309 seconds ago) esc_errorcount: 0 esc_rpm: 0 esc_voltage: 24.03000 esc_current: -0.01600 esc_temperature: 30.00000 failures: 0 esc_address: 2 esc_cmdcount: 57 esc_state: 0 actuator_function: 0 esc_power: 0 esc[2] (esc_report): timestamp: 28243762 (0.003363 seconds ago) esc_errorcount: 0 esc_rpm: 0 esc_voltage: 24.03300 esc_current: -0.05600 esc_temperature: 30.00000 failures: 0 esc_address: 4 esc_cmdcount: 58 esc_state: 0 actuator_function: 0 esc_power: 0 esc[3] (esc_report): timestamp: 28240673 (0.006735 seconds ago) esc_errorcount: 0 esc_rpm: 0 esc_voltage: 24.01200 esc_current: -0.02400 esc_temperature: 30.00000 failures: 0 esc_address: 1 esc_cmdcount: 55 esc_state: 0 actuator_function: 0 esc_power: 0 esc[4] (esc_report): timestamp: 0 esc_errorcount: 0 esc_rpm: 0 esc_voltage: 0.00000 esc_current: 0.00000 esc_temperature: 0.00000 failures: 0 esc_address: 0 esc_cmdcount: 0 esc_state: 0 actuator_function: 0 esc_power: 0 esc[5] (esc_report): timestamp: 0 esc_errorcount: 0 esc_rpm: 0 esc_voltage: 0.00000 esc_current: 0.00000 esc_temperature: 0.00000 failures: 0 esc_address: 0 esc_cmdcount: 0 esc_state: 0 actuator_function: 0 esc_power: 0 esc[6] (esc_report): timestamp: 0 esc_errorcount: 0 esc_rpm: 0 esc_voltage: 0.00000 esc_current: 0.00000 esc_temperature: 0.00000 failures: 0 esc_address: 0 esc_cmdcount: 0 esc_state: 0 actuator_function: 0 esc_power: 0 esc[7] (esc_report): timestamp: 0 esc_errorcount: 0 esc_rpm: 0 esc_voltage: 0.00000 esc_current: 0.00000 esc_temperature: 0.00000 failures: 0 esc_address: 0 esc_cmdcount: 0 esc_state: 0 actuator_function: 0 esc_power: 0INFO [muorb] SLPI: qshell gotten: voxl_esc status INFO [muorb] SLPI: arg0 = 'voxl_esc' INFO [muorb] SLPI: arg1 = 'status' INFO [muorb] SLPI: Max update rate: 0 Hz INFO [muorb] SLPI: Outputs on: no INFO [muorb] SLPI: UART port: 2 INFO [muorb] SLPI: UART open: yes INFO [muorb] SLPI: INFO [muorb] SLPI: Params: VOXL_ESC_CONFIG: 1 INFO [muorb] SLPI: Params: VOXL_ESC_BAUD: 2000000 INFO [muorb] SLPI: Params: VOXL_ESC_FUNC1: 103 INFO [muorb] SLPI: Params: VOXL_ESC_FUNC2: 102 INFO [muorb] SLPI: Params: VOXL_ESC_FUNC3: 104 INFO [muorb] SLPI: Params: VOXL_ESC_FUNC4: 101 INFO [muorb] SLPI: Params: VOXL_ESC_SDIR1: 0 INFO [muorb] SLPI: Params: VOXL_ESC_SDIR2: 0 INFO [muorb] SLPI: Params: VOXL_ESC_SDIR3: 0 INFO [muorb] SLPI: Params: VOXL_ESC_SDIR4: 0 INFO [muorb] SLPI: Params: VOXL_ESC_RPM_MIN: 700 INFO [muorb] SLPI: Params: VOXL_ESC_RPM_MAX: 8000 INFO [muorb] SLPI: INFO [muorb] SLPI: -- ID: 0 INFO [muorb] SLPI: Motor: 3 INFO [muorb] SLPI: Direction: 1 INFO [muorb] SLPI: State: 0 INFO [muorb] SLPI: Requested: 0 RPM INFO [muorb] SLPI: Measured: 0 RPM INFO [muorb] SLPI: Command Counter: 137 INFO [muorb] SLPI: Voltage: 24.010000 VDC INFO [muorb] SLPI: INFO [muorb] SLPI: -- ID: 1 INFO [muorb] SLPI: Motor: 2 INFO [muorb] SLPI: Direction: 1 INFO [muorb] SLPI: State: 0 INFO [muorb] SLPI: Requested: 0 RPM INFO [muorb] SLPI: Measured: 0 RPM INFO [muorb] SLPI: Command Counter: 138 INFO [muorb] SLPI: Voltage: 24.028002 VDC INFO [muorb] SLPI: INFO [muorb] SLPI: -- ID: 2 INFO [muorb] SLPI: Motor: 4 INFO [muorb] SLPI: Direction: 1 INFO [muorb] SLPI: State: 0 INFO [muorb] SLPI: Requested: 0 RPM INFO [muorb] SLPI: Measured: 0 RPM INFO [muorb] SLPI: Command Counter: 139 INFO [muorb] SLPI: Voltage: 24.020000 VDC INFO [muorb] SLPI: INFO [muorb] SLPI: -- ID: 3 INFO [muorb] SLPI: Motor: 1 INFO [muorb] SLPI: Direction: 1 INFO [muorb] SLPI: State: 0 INFO [muorb] SLPI: Requested: 0 RPM INFO [muorb] SLPI: Measured: 0 RPM INFO [muorb] SLPI: Command Counter: 136 INFO [muorb] SLPI: Voltage: 24.010000 VDC INFO [muorb] SLPI: INFO [muorb] SLPI: voxl_esc: cycle: 44256 events, 37887531us elapsed, 856.10us avg, min 64us max 2164us 318. INFO [muorb] SLPI: voxl_esc: output update interval: 44255 events, 1271.43us avg, min 196us max 50628us 1397 INFO [muorb] SLPI: Param prefix: VOXL_ESC INFO [muorb] SLPI: control latency: 44218 events, 60898443us elapsed, 1377.23us avg, min 314us max 3288us 48 INFO [muorb] SLPI: Switched to rate_ctrl work queue INFO [muorb] SLPI: Channel Configuration: INFO [muorb] SLPI: Channel 0: func: 103, value: 0, failsafe: 0, disarmed: 0, min: 700, max: 8000 INFO [muorb] SLPI: Channel 1: func: 102, value: 0, failsafe: 0, disarmed: 0, min: 700, max: 8000 INFO [muorb] SLPI: Channel 2: func: 104, value: 0, failsafe: 0, disarmed: 0, min: 700, max: 8000 INFO [muorb] SLPI: Channel 3: func: 101, value: 0, failsafe: 0, disarmed: 0, min: 700, max: 8000 INFO [muorb] SLPI: Ok executing command: voxl_esc status -
@Alex-Kushleyev This is the results I get from running
px4-listener esc_statusand capturing the results of runningpx4-qshell voxl_esc status.voxl2:/$ px4-listener esc_status TOPIC: esc_status esc_status timestamp: 28243762 (0.002512 seconds ago) counter: 12602 esc_count: 4 esc_connectiontype: 1 esc_online_flags: 15 (0b1111) esc_armed_flags: 15 (0b1111) esc[0] (esc_report): timestamp: 28241456 (0.005087 seconds ago) esc_errorcount: 0 esc_rpm: 0 esc_voltage: 24.03100 esc_current: -0.05600 esc_temperature: 31.00000 failures: 0 esc_address: 3 esc_cmdcount: 56 esc_state: 0 actuator_function: 0 esc_power: 0 esc[1] (esc_report): timestamp: 28242530 (0.004309 seconds ago) esc_errorcount: 0 esc_rpm: 0 esc_voltage: 24.03000 esc_current: -0.01600 esc_temperature: 30.00000 failures: 0 esc_address: 2 esc_cmdcount: 57 esc_state: 0 actuator_function: 0 esc_power: 0 esc[2] (esc_report): timestamp: 28243762 (0.003363 seconds ago) esc_errorcount: 0 esc_rpm: 0 esc_voltage: 24.03300 esc_current: -0.05600 esc_temperature: 30.00000 failures: 0 esc_address: 4 esc_cmdcount: 58 esc_state: 0 actuator_function: 0 esc_power: 0 esc[3] (esc_report): timestamp: 28240673 (0.006735 seconds ago) esc_errorcount: 0 esc_rpm: 0 esc_voltage: 24.01200 esc_current: -0.02400 esc_temperature: 30.00000 failures: 0 esc_address: 1 esc_cmdcount: 55 esc_state: 0 actuator_function: 0 esc_power: 0 esc[4] (esc_report): timestamp: 0 esc_errorcount: 0 esc_rpm: 0 esc_voltage: 0.00000 esc_current: 0.00000 esc_temperature: 0.00000 failures: 0 esc_address: 0 esc_cmdcount: 0 esc_state: 0 actuator_function: 0 esc_power: 0 esc[5] (esc_report): timestamp: 0 esc_errorcount: 0 esc_rpm: 0 esc_voltage: 0.00000 esc_current: 0.00000 esc_temperature: 0.00000 failures: 0 esc_address: 0 esc_cmdcount: 0 esc_state: 0 actuator_function: 0 esc_power: 0 esc[6] (esc_report): timestamp: 0 esc_errorcount: 0 esc_rpm: 0 esc_voltage: 0.00000 esc_current: 0.00000 esc_temperature: 0.00000 failures: 0 esc_address: 0 esc_cmdcount: 0 esc_state: 0 actuator_function: 0 esc_power: 0 esc[7] (esc_report): timestamp: 0 esc_errorcount: 0 esc_rpm: 0 esc_voltage: 0.00000 esc_current: 0.00000 esc_temperature: 0.00000 failures: 0 esc_address: 0 esc_cmdcount: 0 esc_state: 0 actuator_function: 0 esc_power: 0INFO [muorb] SLPI: qshell gotten: voxl_esc status INFO [muorb] SLPI: arg0 = 'voxl_esc' INFO [muorb] SLPI: arg1 = 'status' INFO [muorb] SLPI: Max update rate: 0 Hz INFO [muorb] SLPI: Outputs on: no INFO [muorb] SLPI: UART port: 2 INFO [muorb] SLPI: UART open: yes INFO [muorb] SLPI: INFO [muorb] SLPI: Params: VOXL_ESC_CONFIG: 1 INFO [muorb] SLPI: Params: VOXL_ESC_BAUD: 2000000 INFO [muorb] SLPI: Params: VOXL_ESC_FUNC1: 103 INFO [muorb] SLPI: Params: VOXL_ESC_FUNC2: 102 INFO [muorb] SLPI: Params: VOXL_ESC_FUNC3: 104 INFO [muorb] SLPI: Params: VOXL_ESC_FUNC4: 101 INFO [muorb] SLPI: Params: VOXL_ESC_SDIR1: 0 INFO [muorb] SLPI: Params: VOXL_ESC_SDIR2: 0 INFO [muorb] SLPI: Params: VOXL_ESC_SDIR3: 0 INFO [muorb] SLPI: Params: VOXL_ESC_SDIR4: 0 INFO [muorb] SLPI: Params: VOXL_ESC_RPM_MIN: 700 INFO [muorb] SLPI: Params: VOXL_ESC_RPM_MAX: 8000 INFO [muorb] SLPI: INFO [muorb] SLPI: -- ID: 0 INFO [muorb] SLPI: Motor: 3 INFO [muorb] SLPI: Direction: 1 INFO [muorb] SLPI: State: 0 INFO [muorb] SLPI: Requested: 0 RPM INFO [muorb] SLPI: Measured: 0 RPM INFO [muorb] SLPI: Command Counter: 137 INFO [muorb] SLPI: Voltage: 24.010000 VDC INFO [muorb] SLPI: INFO [muorb] SLPI: -- ID: 1 INFO [muorb] SLPI: Motor: 2 INFO [muorb] SLPI: Direction: 1 INFO [muorb] SLPI: State: 0 INFO [muorb] SLPI: Requested: 0 RPM INFO [muorb] SLPI: Measured: 0 RPM INFO [muorb] SLPI: Command Counter: 138 INFO [muorb] SLPI: Voltage: 24.028002 VDC INFO [muorb] SLPI: INFO [muorb] SLPI: -- ID: 2 INFO [muorb] SLPI: Motor: 4 INFO [muorb] SLPI: Direction: 1 INFO [muorb] SLPI: State: 0 INFO [muorb] SLPI: Requested: 0 RPM INFO [muorb] SLPI: Measured: 0 RPM INFO [muorb] SLPI: Command Counter: 139 INFO [muorb] SLPI: Voltage: 24.020000 VDC INFO [muorb] SLPI: INFO [muorb] SLPI: -- ID: 3 INFO [muorb] SLPI: Motor: 1 INFO [muorb] SLPI: Direction: 1 INFO [muorb] SLPI: State: 0 INFO [muorb] SLPI: Requested: 0 RPM INFO [muorb] SLPI: Measured: 0 RPM INFO [muorb] SLPI: Command Counter: 136 INFO [muorb] SLPI: Voltage: 24.010000 VDC INFO [muorb] SLPI: INFO [muorb] SLPI: voxl_esc: cycle: 44256 events, 37887531us elapsed, 856.10us avg, min 64us max 2164us 318. INFO [muorb] SLPI: voxl_esc: output update interval: 44255 events, 1271.43us avg, min 196us max 50628us 1397 INFO [muorb] SLPI: Param prefix: VOXL_ESC INFO [muorb] SLPI: control latency: 44218 events, 60898443us elapsed, 1377.23us avg, min 314us max 3288us 48 INFO [muorb] SLPI: Switched to rate_ctrl work queue INFO [muorb] SLPI: Channel Configuration: INFO [muorb] SLPI: Channel 0: func: 103, value: 0, failsafe: 0, disarmed: 0, min: 700, max: 8000 INFO [muorb] SLPI: Channel 1: func: 102, value: 0, failsafe: 0, disarmed: 0, min: 700, max: 8000 INFO [muorb] SLPI: Channel 2: func: 104, value: 0, failsafe: 0, disarmed: 0, min: 700, max: 8000 INFO [muorb] SLPI: Channel 3: func: 101, value: 0, failsafe: 0, disarmed: 0, min: 700, max: 8000 INFO [muorb] SLPI: Ok executing command: voxl_esc status@Chase-Riley, your output indicates that the ESC driver in PX4 is communicating with the ESC, I do not see any issue with that!
-
@Chase-Riley, your output indicates that the ESC driver in PX4 is communicating with the ESC, I do not see any issue with that!
@Alex-Kushleyev Not sure what happened but you are correct it is functioning now.
-
@Matthew-Wellner , the baud rate is 2000000 (2Mbit), not 200K, can you please double check your PX4 params?
Also, some helpful commands:
px4-listener esc_statusthis will print out the esc_status message, which the ESC driver should be sending out
Also, if you run voxl-px4 in foreground
systemctl stop voxl-px4 voxl-px4 -dthen you can open another terminal / adb and run:
px4-qshell voxl_esc statusthis will print status of voxl esc driver and the params (in the window where voxl-px4 -d is running)
-
When I run and the motors don't spin up here is what your second set of commands gives me:
-
When I run and the motors don't spin up here is what your second set of commands gives me:
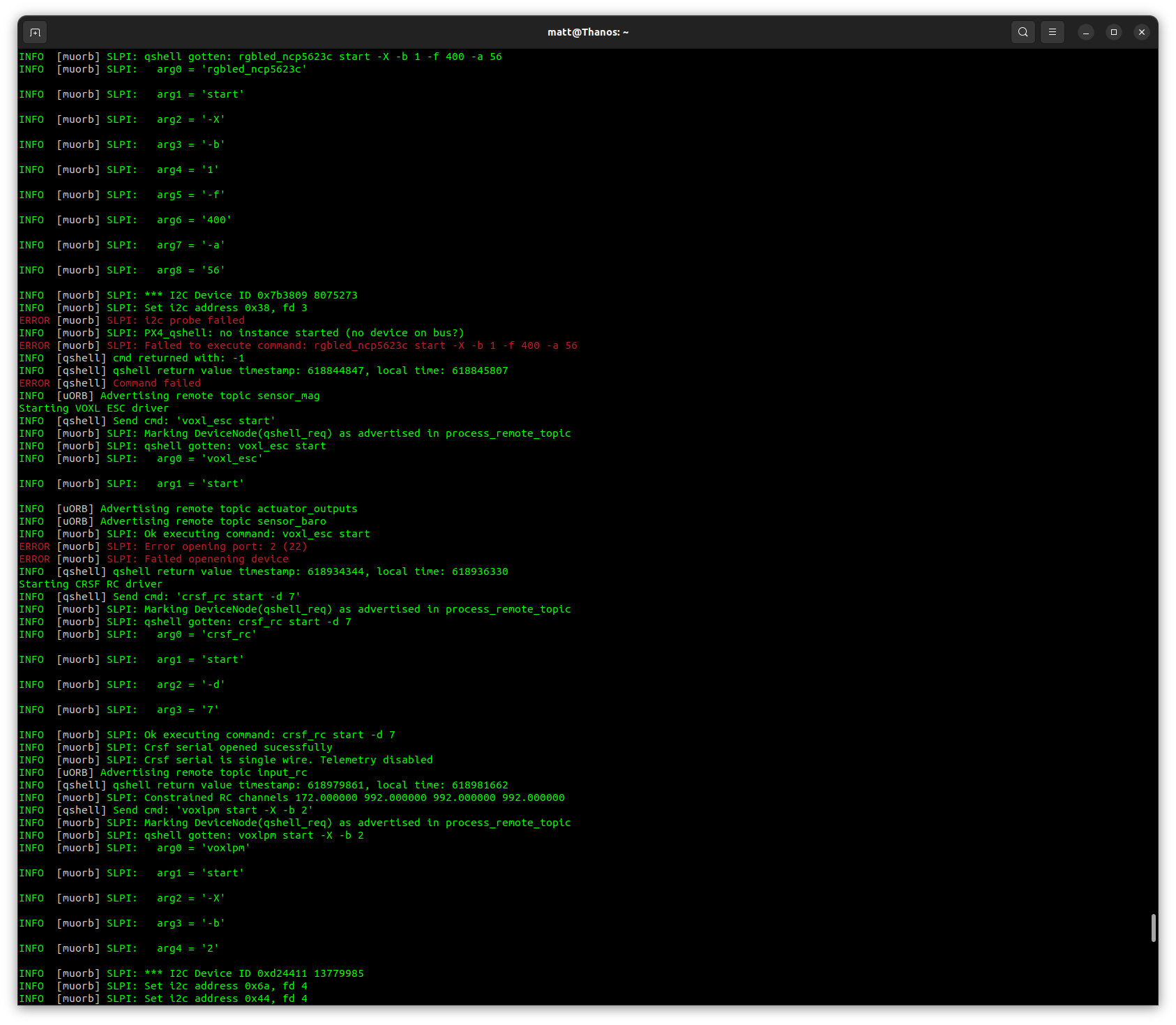
I also watched as px4 started up and it looks like the process fails to open the port for the ESC (see the red after the voxl_esc start command) -
-
I also watched as px4 started up and it looks like the process fails to open the port for the ESC (see the red after the voxl_esc start command) -
@Matthew-Wellner your ESC baud rate in PX4 params is 200,000 , not 2,000,000 which is most likely the issue.
-
@Matthew-Wellner your ESC baud rate in PX4 params is 200,000 , not 2,000,000 which is most likely the issue.
the failure to open the UART port is most likely due to unsupported baud rate (200,000) instead of desired baud rate (2,000,000)
-
the failure to open the UART port is most likely due to unsupported baud rate (200,000) instead of desired baud rate (2,000,000)
@Alex-Kushleyev - Thanks again. You were right and that was all I needed to change. Sorry!
-
@Alex-Kushleyev - Thanks again. You were right and that was all I needed to change. Sorry!
@Matthew-Wellner , no worries! I am glad you got that part working.
-
@Matthew-Wellner , no worries! I am glad you got that part working.
@Alex-Kushleyev I had a similar issue and this helped a lot. thanks.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login