Voxl2 flight deck -attitude estimator not running ( works fine before )
-
Hi guys
we have a 5" drone equipped with voxl2 flight deck and voxl 4-1 esc.
all works fine for few flights and suddenly we got an error says
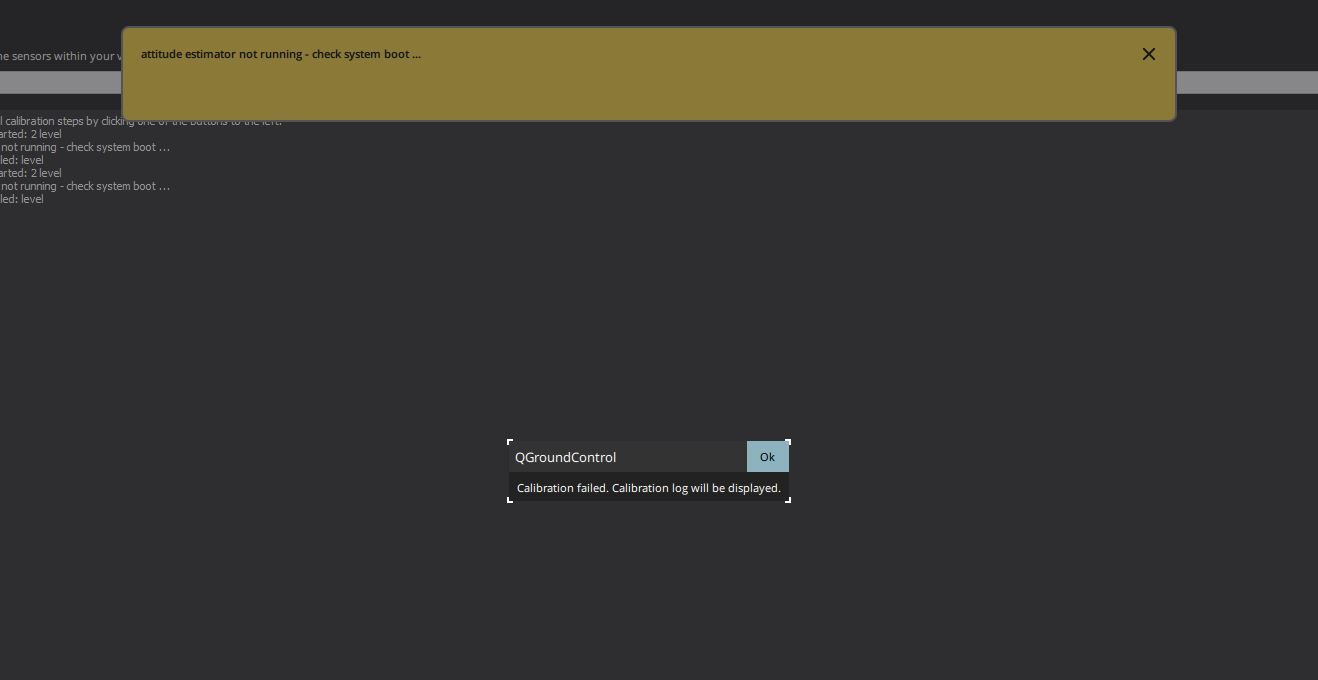
"attitude estimator not running - check system boo and Pref-fight checks failed Baro Sensors 0 Missing"
we tried all sensor calibration list that went well but failed on level horizon calibration with this error .we tried few things that we have found in the forum but none of it work .
we also tried to use another gps/compass (M8n holybro that you provide us ) and nothing change .no movements on qgc even when enter to pid tab there is no gyro/ accelerometer reading , no graph movements .
also in mavlink inspector there is no attitude line.
 .
.there is gps satellite & hdop reading .
any suggestions pls?
-
I am not the best person to answer this one.. @Eric-Katzfey , can you help?
-
Hi guys
we have a 5" drone equipped with voxl2 flight deck and voxl 4-1 esc.
all works fine for few flights and suddenly we got an error says
"attitude estimator not running - check system boo and Pref-fight checks failed Baro Sensors 0 Missing"
we tried all sensor calibration list that went well but failed on level horizon calibration with this error .we tried few things that we have found in the forum but none of it work .
we also tried to use another gps/compass (M8n holybro that you provide us ) and nothing change .no movements on qgc even when enter to pid tab there is no gyro/ accelerometer reading , no graph movements .
also in mavlink inspector there is no attitude line.
.there is gps satellite & hdop reading .
any suggestions pls?
@bensusana This is not something we have seen before so we will have to try to debug what you are seeing. The first thing that jumps out is the missing baro sensor failure. The barometer is physically soldered on to the VOXL2 board so if PX4 cannot set that up then it points to a hardware issue. What version of px4 are you using?
-
@bensusana This is not something we have seen before so we will have to try to debug what you are seeing. The first thing that jumps out is the missing baro sensor failure. The barometer is physically soldered on to the VOXL2 board so if PX4 cannot set that up then it points to a hardware issue. What version of px4 are you using?
@Eric-Katzfey
thanks for the quick reply ,
version 1.12.31 beta , we didn't change any version from the versions provided with the flight deck .
we tried also reset to default version parameters and nothing changed . -
@Eric-Katzfey
thanks for the quick reply ,
version 1.12.31 beta , we didn't change any version from the versions provided with the flight deck .
we tried also reset to default version parameters and nothing changed .@bensusana I'm guessing that the lack of barometer data is what is causing the trouble here so let's see if we can figure out what is going on with that. Can you log into the VOXL2 (adb or ssh) and type the command
px4-listener sensor_baro? You should see barometer data and if you keep entering that command you should see that data changing. -
@bensusana I'm guessing that the lack of barometer data is what is causing the trouble here so let's see if we can figure out what is going on with that. Can you log into the VOXL2 (adb or ssh) and type the command
px4-listener sensor_baro? You should see barometer data and if you keep entering that command you should see that data changing.@Eric-Katzfey
Hi Eric
I’ve contacted through and shell
When entering px4-listener sensor_baro
I’m getting : “ never published “ -
@bensusana I'm guessing that the lack of barometer data is what is causing the trouble here so let's see if we can figure out what is going on with that. Can you log into the VOXL2 (adb or ssh) and type the command
px4-listener sensor_baro? You should see barometer data and if you keep entering that command you should see that data changing.@Eric-Katzfey
ok tried it again , I'm getting this :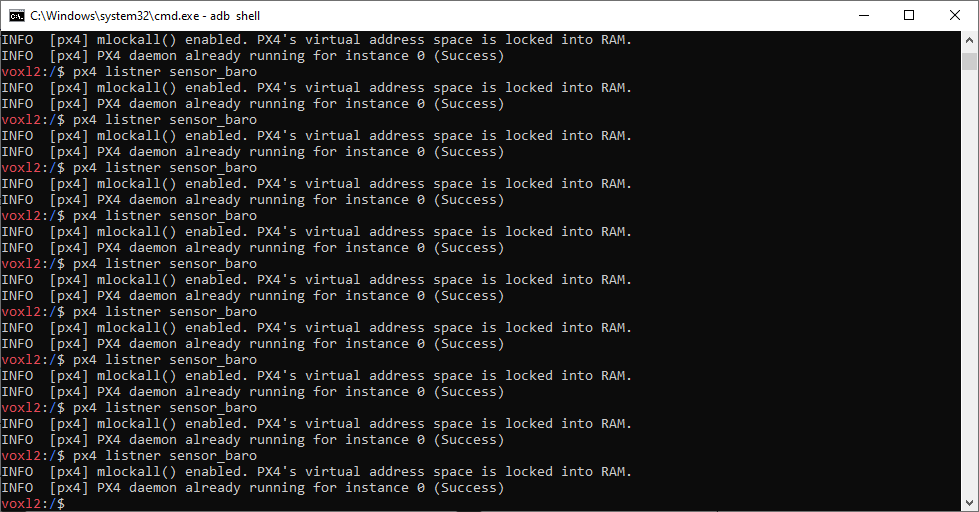
-
@Eric-Katzfey
ok tried it again , I'm getting this : -
@bensusana In that screenshot you have a few mispellings in the command,
you're running
px4 listner sensor_baro, you should be runningpx4-listener sensor_baro@tom my bad ,
So as I mentioned in the last comment, I’m getting “never published “ after checking baro status with the correct command. -
@tom my bad ,
So as I mentioned in the last comment, I’m getting “never published “ after checking baro status with the correct command.@bensusana Okay, that's not a good sign. Can you do the command
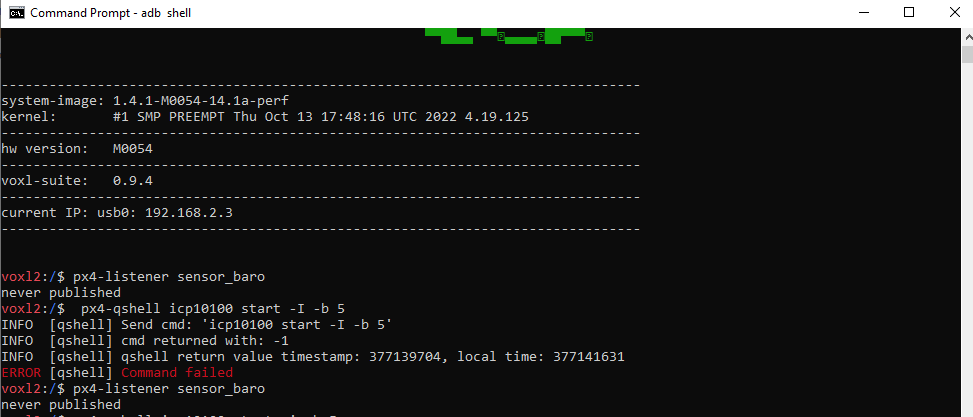
px4-qshell icp10100 start -I -b 5, wait a couple of seconds, and then try thepx4-listener sensor_barocommand again? If the barometer driver is not able to communicate with the barometer then that indicates some sort of hardware failure. -
@bensusana Okay, that's not a good sign. Can you do the command
px4-qshell icp10100 start -I -b 5, wait a couple of seconds, and then try thepx4-listener sensor_barocommand again? If the barometer driver is not able to communicate with the barometer then that indicates some sort of hardware failure.I'm not getting anything...
hardware problem ? -
@bensusana could you try flashing the Voxl and then loading the latest PX4 helper files?
-
@bensusana could you try flashing the Voxl and then loading the latest PX4 helper files?
@Adrian-Hidalgo @Alex-Kushleyev @Eric-Katzfey
UPDATE:
we have open the flightdeck and surprisingly discovered that the barometer sensor was stuck in his cover and ripped off
, look like it was glued to the barometer cover , that explain all.you should check to see if something in this cover is too tight or glued .
we have 4 flightdeck's and now we afraid to move the voxl board from it
since we never took the board out of the deck or crashed it i cant see another reason .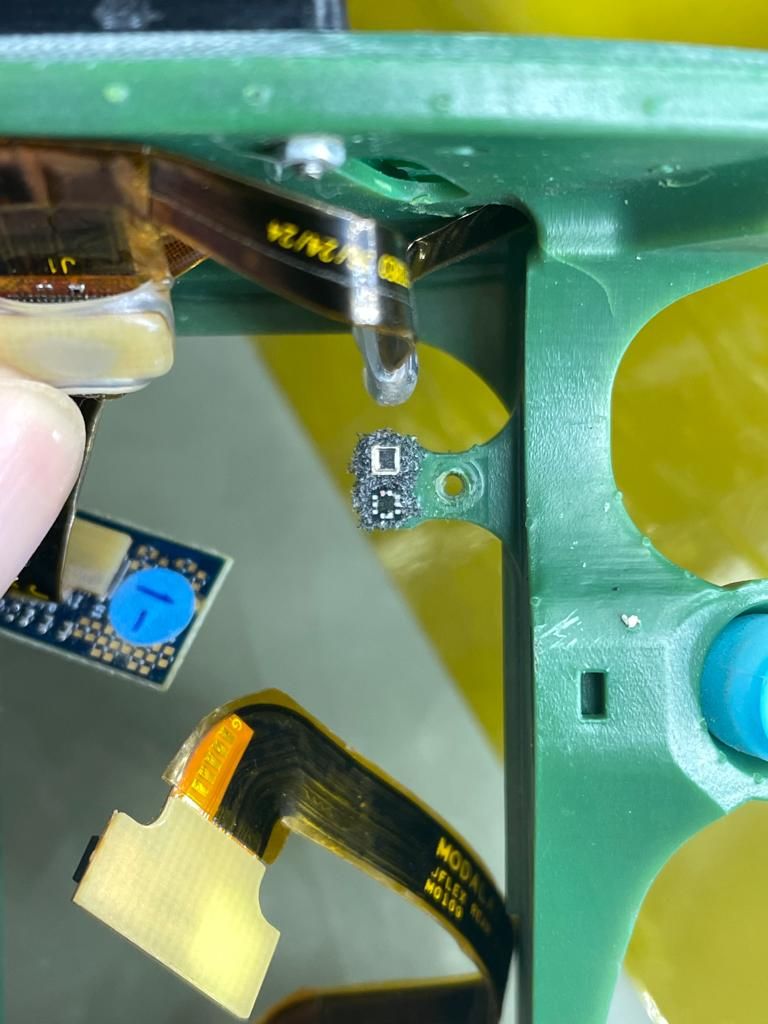

 .
. -
@Adrian-Hidalgo @Alex-Kushleyev @Eric-Katzfey
UPDATE:
we have open the flightdeck and surprisingly discovered that the barometer sensor was stuck in his cover and ripped off
, look like it was glued to the barometer cover , that explain all.you should check to see if something in this cover is too tight or glued .
we have 4 flightdeck's and now we afraid to move the voxl board from it
since we never took the board out of the deck or crashed it i cant see another reason . .@bensusana That'll cause the error for sure.
I can assure you that the barometer cap and foam are not glued to the barometer. There would have had to been a significant force applied to have it ripped off. A crash could inflict the above, but not regular disassembly.We apologize for the inconvenience this has caused you. Please fill out our RMA form with all prevalent information and send it to: contact@modalai.com where one of our representatives will reach out.
Once again, we apologize for the inconvenience and hope to resolve this in a timely manner.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login