Hi @Moderator, @modaltb
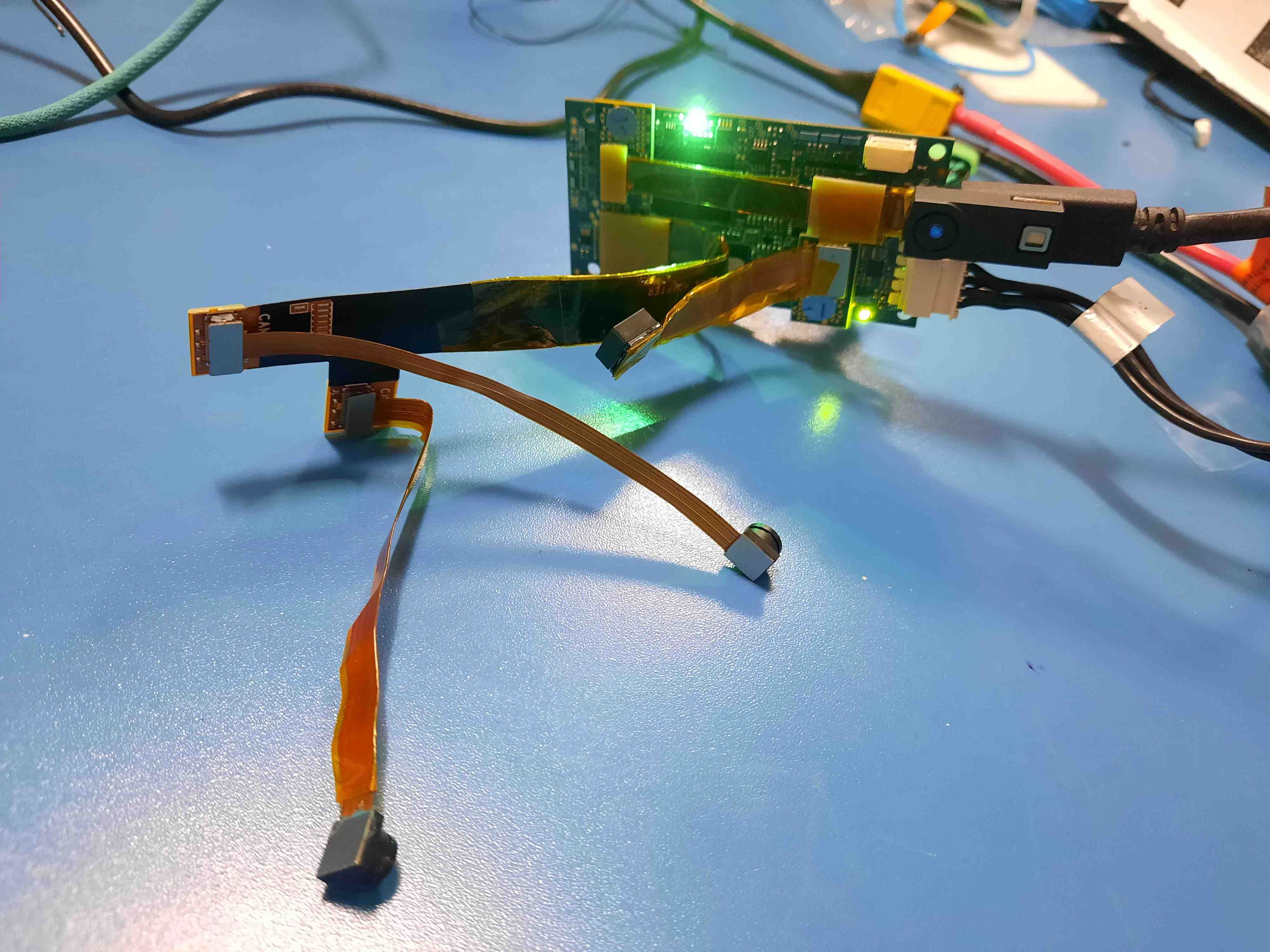
Any update on the configuration of tracking camera in HW Sensor ID- 3. Camera Server crashes whenever i connect tracking camera in HW sensor ID-3 (J7U) but in the camera server configuration, SDK 1.0 (C-06, C-14 , C-16, C-17 ) configurations shows that the tracking camera is connected to J7U.
Can you please give me update on this?