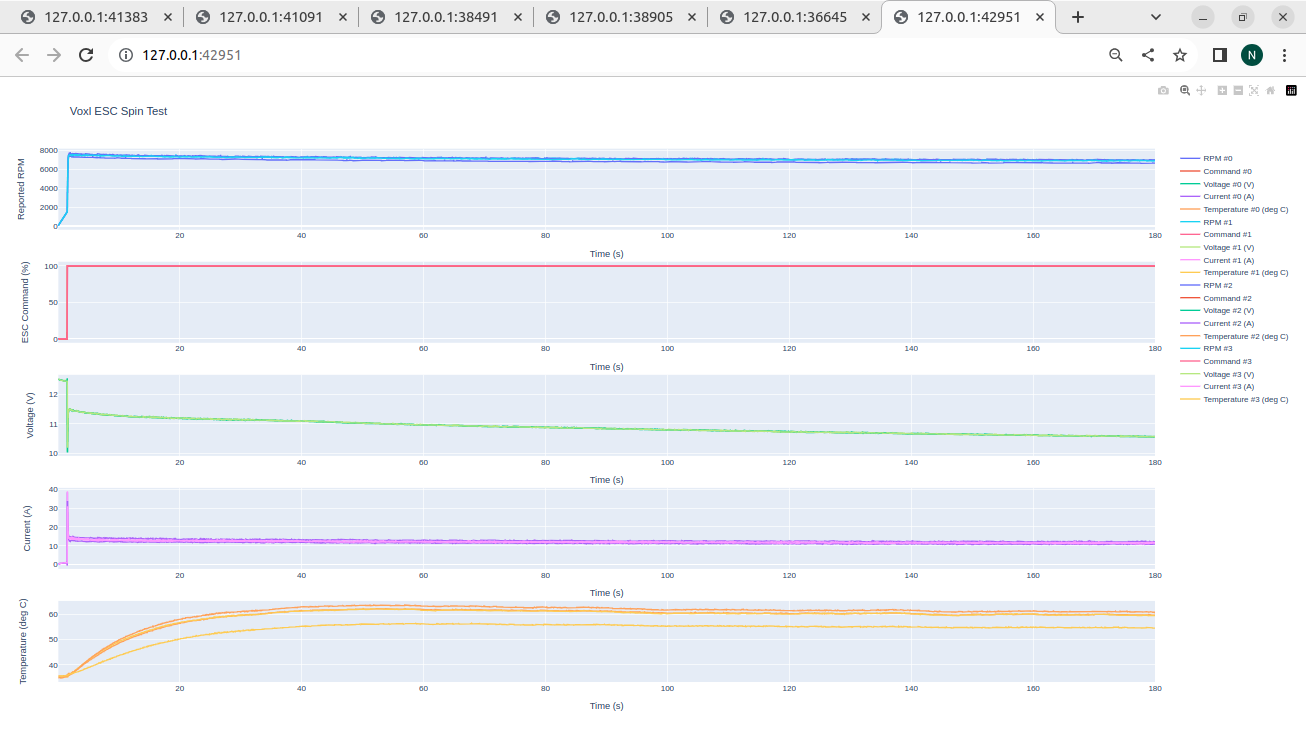
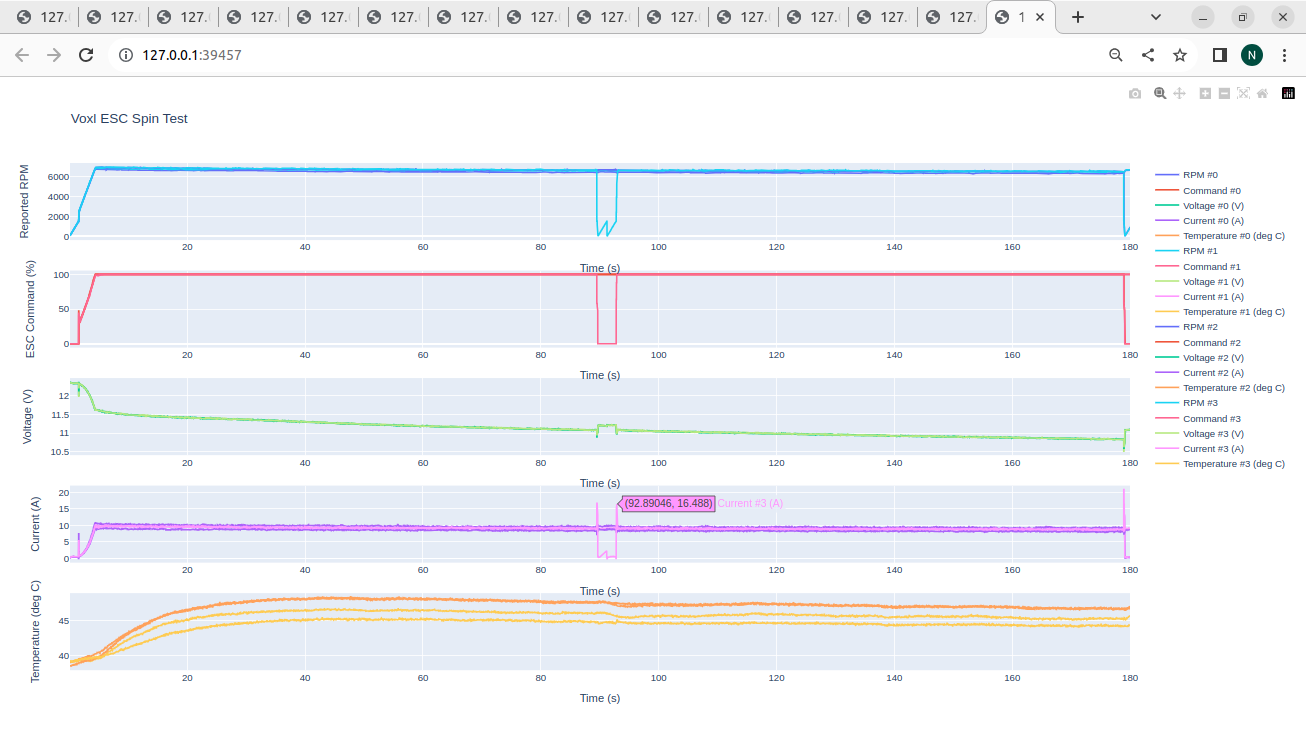
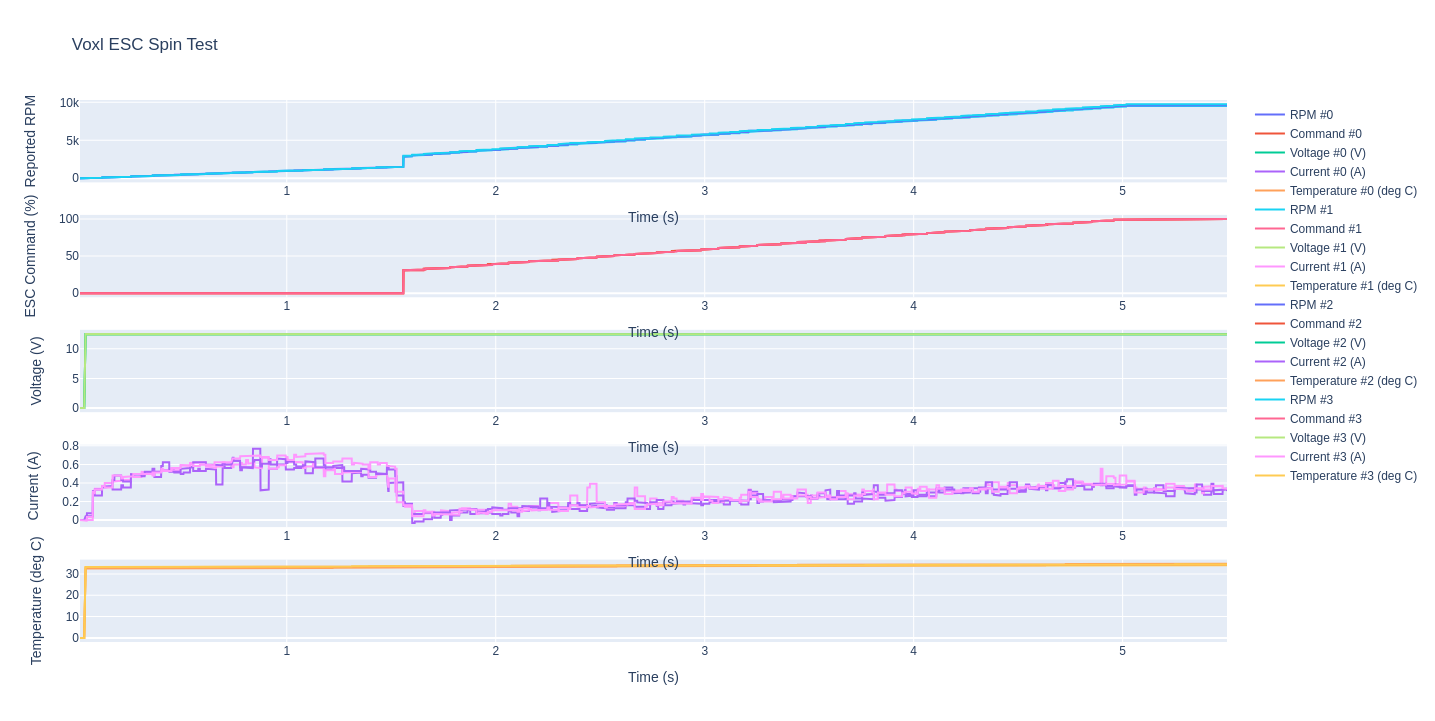
Case-1 ./voxl-esc-spin.py --id 255 --rpm 8000 --timeout 180
[44.181] (0) RPM: 7380, PWR: 95, VOLTAGE: 10.792V, TEMPERATURE: 44.69C, CURRENT: 7.920A
[44.181] (1) RPM: 7401, PWR: 96, VOLTAGE: 10.794V, TEMPERATURE: 43.98C, CURRENT: 8.952A
[44.181] (2) RPM: 7400, PWR: 94, VOLTAGE: 10.794V, TEMPERATURE: 44.67C, CURRENT: 7.656A
[44.181] (3) RPM: 7398, PWR: 96, VOLTAGE: 10.783V, TEMPERATURE: 42.78C, CURRENT: 8.704A
[44.191] (0) RPM: 7380, PWR: 95, VOLTAGE: 10.792V, TEMPERATURE: 44.69C, CURRENT: 7.920A
[44.191] (1) RPM: 7401, PWR: 96, VOLTAGE: 10.794V, TEMPERATURE: 43.98C, CURRENT: 8.952A
[44.191] (2) RPM: 7400, PWR: 94, VOLTAGE: 10.794V, TEMPERATURE: 44.67C, CURRENT: 7.656A
[44.191] (3) RPM: 7506, PWR: 93, VOLTAGE: 10.798V, TEMPERATURE: 42.70C, CURRENT: 8.584A
[44.202] (0) RPM: 7380, PWR: 95, VOLTAGE: 10.792V, TEMPERATURE: 44.69C, CURRENT: 7.920A
[44.202] (1) RPM: 7401, PWR: 96, VOLTAGE: 10.794V, TEMPERATURE: 43.98C, CURRENT: 8.952A
[44.202] (2) RPM: 7400, PWR: 94, VOLTAGE: 10.794V, TEMPERATURE: 44.67C, CURRENT: 7.656A
[44.202] (3) RPM: 7506, PWR: 93, VOLTAGE: 10.798V, TEMPERATURE: 42.70C, CURRENT: 8.584A
[44.212] (0) RPM: 7380, PWR: 95, VOLTAGE: 10.792V, TEMPERATURE: 44.69C, CURRENT: 7.920A
[44.212] (1) RPM: 7401, PWR: 96, VOLTAGE: 10.794V, TEMPERATURE: 43.98C, CURRENT: 8.952A
[44.212] (2) RPM: 7400, PWR: 94, VOLTAGE: 10.794V, TEMPERATURE: 44.67C, CURRENT: 7.656A
[44.212] (3) RPM: 7506, PWR: 93, VOLTAGE: 10.798V, TEMPERATURE: 42.70C, CURRENT: 8.584A
[44.222] (0) RPM: 7386, PWR: 94, VOLTAGE: 10.797V, TEMPERATURE: 44.61C, CURRENT: 7.976A
[44.222] (1) RPM: 7387, PWR: 97, VOLTAGE: 10.754V, TEMPERATURE: 43.79C, CURRENT: 8.272A
[44.222] (2) RPM: 7400, PWR: 94, VOLTAGE: 10.794V, TEMPERATURE: 44.67C, CURRENT: 7.656A
[44.222] (3) RPM: 7506, PWR: 93, VOLTAGE: 10.798V, TEMPERATURE: 42.70C, CURRENT: 8.584A
[44.231] (0) RPM: 7386, PWR: 94, VOLTAGE: 10.797V, TEMPERATURE: 44.61C, CURRENT: 7.976A
[44.231] (1) RPM: 7387, PWR: 97, VOLTAGE: 10.754V, TEMPERATURE: 43.79C, CURRENT: 8.272A
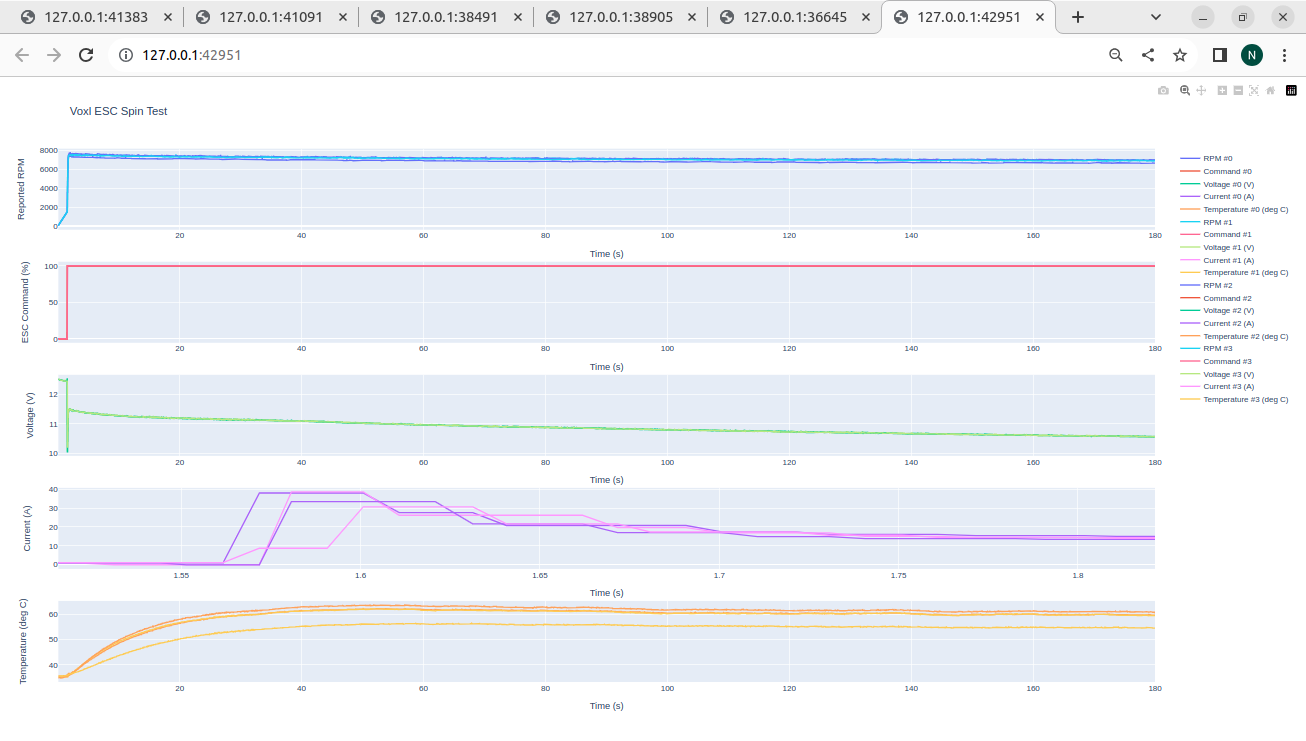
[44.231] (2) RPM: 1726, PWR: 48, VOLTAGE: 10.572V, TEMPERATURE: 44.64C, CURRENT: 19.544A
[44.231] (3) RPM: 7386, PWR: 97, VOLTAGE: 10.668V, TEMPERATURE: 42.72C, CURRENT: 8.896A
[44.241] (0) RPM: 7386, PWR: 94, VOLTAGE: 10.797V, TEMPERATURE: 44.61C, CURRENT: 7.976A
[44.241] (1) RPM: 7387, PWR: 97, VOLTAGE: 10.754V, TEMPERATURE: 43.79C, CURRENT: 8.272A
[44.241] (2) RPM: 1726, PWR: 48, VOLTAGE: 10.572V, TEMPERATURE: 44.64C, CURRENT: 19.544A
[44.241] (3) RPM: 7386, PWR: 97, VOLTAGE: 10.668V, TEMPERATURE: 42.72C, CURRENT: 8.896A
[44.252] (0) RPM: 7376, PWR: 95, VOLTAGE: 10.713V, TEMPERATURE: 44.82C, CURRENT: 8.216A
[44.252] (1) RPM: 7387, PWR: 97, VOLTAGE: 10.754V, TEMPERATURE: 43.79C, CURRENT: 8.272A
[44.252] (2) RPM: 1726, PWR: 48, VOLTAGE: 10.572V, TEMPERATURE: 44.64C, CURRENT: 19.544A
[44.252] (3) RPM: 7386, PWR: 97, VOLTAGE: 10.668V, TEMPERATURE: 42.72C, CURRENT: 8.896A
[44.261] (0) RPM: 7376, PWR: 95, VOLTAGE: 10.713V, TEMPERATURE: 44.82C, CURRENT: 8.216A
[44.261] (1) RPM: 7391, PWR: 97, VOLTAGE: 10.741V, TEMPERATURE: 43.79C, CURRENT: 9.104A
[44.261] (2) RPM: 1113, PWR: 41, VOLTAGE: 10.741V, TEMPERATURE: 44.78C, CURRENT: 9.416A
[44.261] (3) RPM: 7386, PWR: 97, VOLTAGE: 10.668V, TEMPERATURE: 42.72C, CURRENT: 8.896A
[44.271] (0) RPM: 7376, PWR: 95, VOLTAGE: 10.713V, TEMPERATURE: 44.82C, CURRENT: 8.216A
[44.271] (1) RPM: 7391, PWR: 97, VOLTAGE: 10.741V, TEMPERATURE: 43.79C, CURRENT: 9.104A
[44.271] (2) RPM: 1113, PWR: 41, VOLTAGE: 10.741V, TEMPERATURE: 44.78C, CURRENT: 9.416A
[44.271] (3) RPM: 7386, PWR: 97, VOLTAGE: 10.668V, TEMPERATURE: 42.72C, CURRENT: 8.896A
[44.282] (0) RPM: 7376, PWR: 95, VOLTAGE: 10.713V, TEMPERATURE: 44.82C, CURRENT: 8.216A
[44.282] (1) RPM: 7391, PWR: 97, VOLTAGE: 10.741V, TEMPERATURE: 43.79C, CURRENT: 9.104A
[44.282] (2) RPM: 1113, PWR: 41, VOLTAGE: 10.741V, TEMPERATURE: 44.78C, CURRENT: 9.416A
[44.282] (3) RPM: 7411, PWR: 96, VOLTAGE: 10.753V, TEMPERATURE: 42.88C, CURRENT: 8.504A
[44.291] (0) RPM: 7369, PWR: 95, VOLTAGE: 10.750V, TEMPERATURE: 44.70C, CURRENT: 8.088A
[44.291] (1) RPM: 7396, PWR: 96, VOLTAGE: 10.782V, TEMPERATURE: 43.82C, CURRENT: 9.008A
[44.291] (2) RPM: 1113, PWR: 41, VOLTAGE: 10.741V, TEMPERATURE: 44.78C, CURRENT: 9.416A
[44.291] (3) RPM: 7411, PWR: 96, VOLTAGE: 10.753V, TEMPERATURE: 42.88C, CURRENT: 8.504A
[44.301] (0) RPM: 7369, PWR: 95, VOLTAGE: 10.750V, TEMPERATURE: 44.70C, CURRENT: 8.088A
[44.301] (1) RPM: 7396, PWR: 96, VOLTAGE: 10.782V, TEMPERATURE: 43.82C, CURRENT: 9.008A
[44.301] (2) RPM: 1113, PWR: 41, VOLTAGE: 10.741V, TEMPERATURE: 44.78C, CURRENT: 9.416A
[44.301] (3) RPM: 7411, PWR: 96, VOLTAGE: 10.753V, TEMPERATURE: 42.88C, CURRENT: 8.504A
[44.312] (0) RPM: 7369, PWR: 95, VOLTAGE: 10.750V, TEMPERATURE: 44.70C, CURRENT: 8.088A
[44.312] (1) RPM: 7396, PWR: 96, VOLTAGE: 10.782V, TEMPERATURE: 43.82C, CURRENT: 9.008A
[44.312] (2) RPM: 709, PWR: 37, VOLTAGE: 10.764V, TEMPERATURE: 44.83C, CURRENT: 9.600A
[44.312] (3) RPM: 7411, PWR: 96, VOLTAGE: 10.753V, TEMPERATURE: 42.88C, CURRENT: 8.504A
[44.321] (0) RPM: 7383, PWR: 95, VOLTAGE: 10.790V, TEMPERATURE: 44.59C, CURRENT: 7.984A
[44.321] (1) RPM: 7396, PWR: 96, VOLTAGE: 10.782V, TEMPERATURE: 43.82C, CURRENT: 9.008A
[44.321] (2) RPM: 709, PWR: 37, VOLTAGE: 10.764V, TEMPERATURE: 44.83C, CURRENT: 9.600A
[44.321] (3) RPM: 7417, PWR: 96, VOLTAGE: 10.774V, TEMPERATURE: 42.82C, CURRENT: 8.512A
[44.331] (0) RPM: 7383, PWR: 95, VOLTAGE: 10.790V, TEMPERATURE: 44.59C, CURRENT: 7.984A
[44.331] (1) RPM: 7396, PWR: 96, VOLTAGE: 10.782V, TEMPERATURE: 43.82C, CURRENT: 9.008A
[44.331] (2) RPM: 709, PWR: 37, VOLTAGE: 10.764V, TEMPERATURE: 44.83C, CURRENT: 9.600A
[44.331] (3) RPM: 7417, PWR: 96, VOLTAGE: 10.774V, TEMPERATURE: 42.82C, CURRENT: 8.512A
[44.341] (0) RPM: 7383, PWR: 95, VOLTAGE: 10.790V, TEMPERATURE: 44.59C, CURRENT: 7.984A
[44.341] (1) RPM: 7396, PWR: 96, VOLTAGE: 10.782V, TEMPERATURE: 43.82C, CURRENT: 9.008A
[44.341] (2) RPM: 709, PWR: 37, VOLTAGE: 10.764V, TEMPERATURE: 44.83C, CURRENT: 9.600A
[44.341] (3) RPM: 7417, PWR: 96, VOLTAGE: 10.774V, TEMPERATURE: 42.82C, CURRENT: 8.512A
[44.351] (0) RPM: 7383, PWR: 95, VOLTAGE: 10.790V, TEMPERATURE: 44.59C, CURRENT: 7.984A
[44.351] (1) RPM: 7406, PWR: 96, VOLTAGE: 10.780V, TEMPERATURE: 43.85C, CURRENT: 8.952A
[44.351] (2) RPM: 519, PWR: 36, VOLTAGE: 10.786V, TEMPERATURE: 44.66C, CURRENT: 7.424A
[44.351] (3) RPM: 7417, PWR: 96, VOLTAGE: 10.774V, TEMPERATURE: 42.82C, CURRENT: 8.512A
[44.360] (0) RPM: 7383, PWR: 95, VOLTAGE: 10.790V, TEMPERATURE: 44.59C, CURRENT: 7.984A
[44.360] (1) RPM: 7406, PWR: 96, VOLTAGE: 10.780V, TEMPERATURE: 43.85C, CURRENT: 8.952A
[44.360] (2) RPM: 519, PWR: 36, VOLTAGE: 10.786V, TEMPERATURE: 44.66C, CURRENT: 7.424A
[44.360] (3) RPM: 7436, PWR: 95, VOLTAGE: 10.838V, TEMPERATURE: 42.90C, CURRENT: 8.752A
[44.371] (0) RPM: 7383, PWR: 95, VOLTAGE: 10.790V, TEMPERATURE: 44.59C, CURRENT: 7.984A
[44.371] (1) RPM: 7406, PWR: 96, VOLTAGE: 10.780V, TEMPERATURE: 43.85C, CURRENT: 8.952A
[44.371] (2) RPM: 519, PWR: 36, VOLTAGE: 10.786V, TEMPERATURE: 44.66C, CURRENT: 7.424A
[44.371] (3) RPM: 7436, PWR: 95, VOLTAGE: 10.838V, TEMPERATURE: 42.90C, CURRENT: 8.752A
[44.381] (0) RPM: 7401, PWR: 93, VOLTAGE: 10.901V, TEMPERATURE: 44.73C, CURRENT: 8.016A
[44.381] (1) RPM: 7407, PWR: 95, VOLTAGE: 10.924V, TEMPERATURE: 43.94C, CURRENT: 8.776A
[44.381] (2) RPM: 519, PWR: 36, VOLTAGE: 10.786V, TEMPERATURE: 44.66C, CURRENT: 7.424A
[44.381] (3) RPM: 7436, PWR: 95, VOLTAGE: 10.838V, TEMPERATURE: 42.90C, CURRENT: 8.752A
[44.392] (0) RPM: 7401, PWR: 93, VOLTAGE: 10.901V, TEMPERATURE: 44.73C, CURRENT: 8.016A
[44.392] (1) RPM: 7407, PWR: 95, VOLTAGE: 10.924V, TEMPERATURE: 43.94C, CURRENT: 8.776A
[44.392] (2) RPM: 19, PWR: 0, VOLTAGE: 10.921V, TEMPERATURE: 44.48C, CURRENT: -0.464A
[44.392] (3) RPM: 7436, PWR: 95, VOLTAGE: 10.838V, TEMPERATURE: 42.90C, CURRENT: 8.752A
[44.402] (0) RPM: 7401, PWR: 93, VOLTAGE: 10.901V, TEMPERATURE: 44.73C, CURRENT: 8.016A
[44.402] (1) RPM: 7407, PWR: 95, VOLTAGE: 10.924V, TEMPERATURE: 43.94C, CURRENT: 8.776A
[44.402] (2) RPM: 19, PWR: 0, VOLTAGE: 10.921V, TEMPERATURE: 44.48C, CURRENT: -0.464A
[44.402] (3) RPM: 7436, PWR: 95, VOLTAGE: 10.838V, TEMPERATURE: 42.90C, CURRENT: 8.752A
[44.412] (0) RPM: 7387, PWR: 93, VOLTAGE: 10.935V, TEMPERATURE: 44.68C, CURRENT: 7.888A
[44.412] (1) RPM: 7407, PWR: 95, VOLTAGE: 10.924V, TEMPERATURE: 43.94C, CURRENT: 8.776A
[44.412] (2) RPM: 19, PWR: 0, VOLTAGE: 10.921V, TEMPERATURE: 44.48C, CURRENT: -0.464A
[44.412] (3) RPM: 7410, PWR: 94, VOLTAGE: 10.931V, TEMPERATURE: 42.84C, CURRENT: 8.512A
[44.422] (0) RPM: 7387, PWR: 93, VOLTAGE: 10.935V, TEMPERATURE: 44.68C, CURRENT: 7.888A
[44.422] (1) RPM: 7404, PWR: 95, VOLTAGE: 10.928V, TEMPERATURE: 43.93C, CURRENT: 8.824A
[44.422] (2) RPM: 60, PWR: 0, VOLTAGE: 10.928V, TEMPERATURE: 44.43C, CURRENT: -0.256A
[44.422] (3) RPM: 7410, PWR: 94, VOLTAGE: 10.931V, TEMPERATURE: 42.84C, CURRENT: 8.512A
[44.431] (0) RPM: 7387, PWR: 93, VOLTAGE: 10.935V, TEMPERATURE: 44.68C, CURRENT: 7.888A
[44.431] (1) RPM: 7404, PWR: 95, VOLTAGE: 10.928V, TEMPERATURE: 43.93C, CURRENT: 8.824A
[44.431] (2) RPM: 60, PWR: 0, VOLTAGE: 10.928V, TEMPERATURE: 44.43C, CURRENT: -0.256A
[44.431] (3) RPM: 7410, PWR: 94, VOLTAGE: 10.931V, TEMPERATURE: 42.84C, CURRENT: 8.512A
[44.441] (0) RPM: 7387, PWR: 93, VOLTAGE: 10.935V, TEMPERATURE: 44.68C, CURRENT: 7.888A
[44.441] (1) RPM: 7404, PWR: 95, VOLTAGE: 10.928V, TEMPERATURE: 43.93C, CURRENT: 8.824A
[44.441] (2) RPM: 60, PWR: 0, VOLTAGE: 10.928V, TEMPERATURE: 44.43C, CURRENT: -0.256A
[44.441] (3) RPM: 7404, PWR: 95, VOLTAGE: 10.923V, TEMPERATURE: 42.82C, CURRENT: 8.560A
[44.451] (0) RPM: 7403, PWR: 93, VOLTAGE: 10.921V, TEMPERATURE: 44.72C, CURRENT: 7.936A
[44.451] (1) RPM: 7405, PWR: 95, VOLTAGE: 10.929V, TEMPERATURE: 43.93C, CURRENT: 8.760A
[44.451] (2) RPM: 60, PWR: 0, VOLTAGE: 10.928V, TEMPERATURE: 44.43C, CURRENT: -0.256A
[44.451] (3) RPM: 7404, PWR: 95, VOLTAGE: 10.923V, TEMPERATURE: 42.82C, CURRENT: 8.560A
[44.461] (0) RPM: 7403, PWR: 93, VOLTAGE: 10.921V, TEMPERATURE: 44.72C, CURRENT: 7.936A
[44.461] (1) RPM: 7405, PWR: 95, VOLTAGE: 10.929V, TEMPERATURE: 43.93C, CURRENT: 8.760A
[44.461] (2) RPM: 60, PWR: 0, VOLTAGE: 10.928V, TEMPERATURE: 44.43C, CURRENT: -0.256A
[44.461] (3) RPM: 7404, PWR: 95, VOLTAGE: 10.923V, TEMPERATURE: 42.82C, CURRENT: 8.560A
[44.471] (0) RPM: 7403, PWR: 93, VOLTAGE: 10.921V, TEMPERATURE: 44.72C, CURRENT: 7.936A
[44.471] (1) RPM: 7405, PWR: 95, VOLTAGE: 10.929V, TEMPERATURE: 43.93C, CURRENT: 8.760A
[44.471] (2) RPM: 99, PWR: 0, VOLTAGE: 10.917V, TEMPERATURE: 44.45C, CURRENT: -0.208A
[44.471] (3) RPM: 7404, PWR: 95, VOLTAGE: 10.923V, TEMPERATURE: 42.82C, CURRENT: 8.560A
[44.481] (0) RPM: 7404, PWR: 93, VOLTAGE: 10.927V, TEMPERATURE: 44.67C, CURRENT: 7.928A
[44.481] (1) RPM: 7405, PWR: 95, VOLTAGE: 10.929V, TEMPERATURE: 43.93C, CURRENT: 8.760A
[44.481] (2) RPM: 99, PWR: 0, VOLTAGE: 10.917V, TEMPERATURE: 44.45C, CURRENT: -0.208A
[44.481] (3) RPM: 7390, PWR: 95, VOLTAGE: 10.928V, TEMPERATURE: 42.72C, CURRENT: 8.632A
[44.491] (0) RPM: 7404, PWR: 93, VOLTAGE: 10.927V, TEMPERATURE: 44.67C, CURRENT: 7.928A
[44.491] (1) RPM: 7405, PWR: 95, VOLTAGE: 10.929V, TEMPERATURE: 43.93C, CURRENT: 8.760A
[44.491] (2) RPM: 99, PWR: 0, VOLTAGE: 10.917V, TEMPERATURE: 44.45C, CURRENT: -0.208A
[44.491] (3) RPM: 7390, PWR: 95, VOLTAGE: 10.928V, TEMPERATURE: 42.72C, CURRENT: 8.632A
[44.501] (0) RPM: 7404, PWR: 93, VOLTAGE: 10.927V, TEMPERATURE: 44.67C, CURRENT: 7.928A
[44.501] (1) RPM: 7412, PWR: 95, VOLTAGE: 10.926V, TEMPERATURE: 43.97C, CURRENT: 8.808A
[44.501] (2) RPM: 139, PWR: 0, VOLTAGE: 10.924V, TEMPERATURE: 44.46C, CURRENT: -0.232A
[44.501] (3) RPM: 7390, PWR: 95, VOLTAGE: 10.928V, TEMPERATURE: 42.72C, CURRENT: 8.632A
[44.514] (0) RPM: 7404, PWR: 93, VOLTAGE: 10.927V, TEMPERATURE: 44.67C, CURRENT: 7.928A
[44.514] (1) RPM: 7412, PWR: 95, VOLTAGE: 10.926V, TEMPERATURE: 43.97C, CURRENT: 8.808A
[44.514] (2) RPM: 139, PWR: 0, VOLTAGE: 10.924V, TEMPERATURE: 44.46C, CURRENT: -0.232A
[44.514] (3) RPM: 7390, PWR: 95, VOLTAGE: 10.928V, TEMPERATURE: 42.72C, CURRENT: 8.632A
[44.522] (0) RPM: 7404, PWR: 93, VOLTAGE: 10.927V, TEMPERATURE: 44.67C, CURRENT: 7.928A
[44.522] (1) RPM: 7412, PWR: 95, VOLTAGE: 10.926V, TEMPERATURE: 43.97C, CURRENT: 8.808A
[44.522] (2) RPM: 139, PWR: 0, VOLTAGE: 10.924V, TEMPERATURE: 44.46C, CURRENT: -0.232A
[44.522] (3) RPM: 7392, PWR: 95, VOLTAGE: 10.914V, TEMPERATURE: 42.74C, CURRENT: 8.856A
[44.531] (0) RPM: 7404, PWR: 93, VOLTAGE: 10.927V, TEMPERATURE: 44.67C, CURRENT: 7.928A
[44.531] (1) RPM: 7412, PWR: 95, VOLTAGE: 10.926V, TEMPERATURE: 43.97C, CURRENT: 8.808A
[44.531] (2) RPM: 139, PWR: 0, VOLTAGE: 10.924V, TEMPERATURE: 44.46C, CURRENT: -0.232A
[44.531] (3) RPM: 7392, PWR: 95, VOLTAGE: 10.914V, TEMPERATURE: 42.74C, CURRENT: 8.856A
[44.541] (0) RPM: 7398, PWR: 93, VOLTAGE: 10.918V, TEMPERATURE: 44.64C, CURRENT: 7.952A
[44.541] (1) RPM: 7410, PWR: 95, VOLTAGE: 10.917V, TEMPERATURE: 44.06C, CURRENT: 8.800A
[44.541] (2) RPM: 139, PWR: 0, VOLTAGE: 10.924V, TEMPERATURE: 44.46C, CURRENT: -0.232A
[44.541] (3) RPM: 7392, PWR: 95, VOLTAGE: 10.914V, TEMPERATURE: 42.74C, CURRENT: 8.856A
[44.551] (0) RPM: 7398, PWR: 93, VOLTAGE: 10.918V, TEMPERATURE: 44.64C, CURRENT: 7.952A
[44.551] (1) RPM: 7410, PWR: 95, VOLTAGE: 10.917V, TEMPERATURE: 44.06C, CURRENT: 8.800A
[44.551] (2) RPM: 178, PWR: 0, VOLTAGE: 10.920V, TEMPERATURE: 44.49C, CURRENT: -0.208A
[44.551] (3) RPM: 7392, PWR: 95, VOLTAGE: 10.914V, TEMPERATURE: 42.74C, CURRENT: 8.856A
[44.561] (0) RPM: 7398, PWR: 93, VOLTAGE: 10.918V, TEMPERATURE: 44.64C, CURRENT: 7.952A
[44.561] (1) RPM: 7410, PWR: 95, VOLTAGE: 10.917V, TEMPERATURE: 44.06C, CURRENT: 8.800A
[44.561] (2) RPM: 178, PWR: 0, VOLTAGE: 10.920V, TEMPERATURE: 44.49C, CURRENT: -0.208A
[44.561] (3) RPM: 7392, PWR: 95, VOLTAGE: 10.914V, TEMPERATURE: 42.74C, CURRENT: 8.856A
[44.572] (0) RPM: 7399, PWR: 93, VOLTAGE: 10.920V, TEMPERATURE: 44.71C, CURRENT: 7.904A
[44.572] (1) RPM: 7410, PWR: 95, VOLTAGE: 10.917V, TEMPERATURE: 44.06C, CURRENT: 8.800A
[44.572] (2) RPM: 178, PWR: 0, VOLTAGE: 10.920V, TEMPERATURE: 44.49C, CURRENT: -0.208A
[44.572] (3) RPM: 7385, PWR: 95, VOLTAGE: 10.910V, TEMPERATURE: 42.74C, CURRENT: 8.784A
[44.581] (0) RPM: 7399, PWR: 93, VOLTAGE: 10.920V, TEMPERATURE: 44.71C, CURRENT: 7.904A
[44.581] (1) RPM: 7413, PWR: 95, VOLTAGE: 10.931V, TEMPERATURE: 43.93C, CURRENT: 8.760A
[44.581] (2) RPM: 218, PWR: 0, VOLTAGE: 10.923V, TEMPERATURE: 44.46C, CURRENT: -0.152A
[44.581] (3) RPM: 7385, PWR: 95, VOLTAGE: 10.910V, TEMPERATURE: 42.74C, CURRENT: 8.784A
[44.591] (0) RPM: 7399, PWR: 93, VOLTAGE: 10.920V, TEMPERATURE: 44.71C, CURRENT: 7.904A
[44.591] (1) RPM: 7413, PWR: 95, VOLTAGE: 10.931V, TEMPERATURE: 43.93C, CURRENT: 8.760A
[44.591] (2) RPM: 218, PWR: 0, VOLTAGE: 10.923V, TEMPERATURE: 44.46C, CURRENT: -0.152A
[44.591] (3) RPM: 7385, PWR: 95, VOLTAGE: 10.910V, TEMPERATURE: 42.74C, CURRENT: 8.784A
[44.601] (0) RPM: 7399, PWR: 93, VOLTAGE: 10.920V, TEMPERATURE: 44.71C, CURRENT: 7.904A
[44.601] (1) RPM: 7413, PWR: 95, VOLTAGE: 10.931V, TEMPERATURE: 43.93C, CURRENT: 8.760A
[44.601] (2) RPM: 218, PWR: 0, VOLTAGE: 10.923V, TEMPERATURE: 44.46C, CURRENT: -0.152A
[44.601] (3) RPM: 7380, PWR: 95, VOLTAGE: 10.913V, TEMPERATURE: 42.77C, CURRENT: 8.696A
[44.611] (0) RPM: 7403, PWR: 93, VOLTAGE: 10.924V, TEMPERATURE: 44.74C, CURRENT: 7.936A
[44.611] (1) RPM: 7411, PWR: 95, VOLTAGE: 10.937V, TEMPERATURE: 43.87C, CURRENT: 8.744A
[44.611] (2) RPM: 218, PWR: 0, VOLTAGE: 10.923V, TEMPERATURE: 44.46C, CURRENT: -0.152A
[44.611] (3) RPM: 7380, PWR: 95, VOLTAGE: 10.913V, TEMPERATURE: 42.77C, CURRENT: 8.696A
[44.621] (0) RPM: 7403, PWR: 93, VOLTAGE: 10.924V, TEMPERATURE: 44.74C, CURRENT: 7.936A
[44.621] (1) RPM: 7411, PWR: 95, VOLTAGE: 10.937V, TEMPERATURE: 43.87C, CURRENT: 8.744A
[44.621] (2) RPM: 218, PWR: 0, VOLTAGE: 10.923V, TEMPERATURE: 44.46C, CURRENT: -0.152A
[44.621] (3) RPM: 7380, PWR: 95, VOLTAGE: 10.913V, TEMPERATURE: 42.77C, CURRENT: 8.696A
[44.631] (0) RPM: 7403, PWR: 93, VOLTAGE: 10.924V, TEMPERATURE: 44.74C, CURRENT: 7.936A
[44.631] (1) RPM: 7411, PWR: 95, VOLTAGE: 10.937V, TEMPERATURE: 43.87C, CURRENT: 8.744A
[44.631] (2) RPM: 258, PWR: 0, VOLTAGE: 10.920V, TEMPERATURE: 44.53C, CURRENT: -0.144A
[44.631] (3) RPM: 7380, PWR: 95, VOLTAGE: 10.913V, TEMPERATURE: 42.77C, CURRENT: 8.696A
[44.641] (0) RPM: 7402, PWR: 93, VOLTAGE: 10.919V, TEMPERATURE: 44.81C, CURRENT: 7.888A
[44.641] (1) RPM: 7411, PWR: 95, VOLTAGE: 10.937V, TEMPERATURE: 43.87C, CURRENT: 8.744A
[44.641] (2) RPM: 258, PWR: 0, VOLTAGE: 10.920V, TEMPERATURE: 44.53C, CURRENT: -0.144A
[44.641] (3) RPM: 7390, PWR: 95, VOLTAGE: 10.914V, TEMPERATURE: 42.82C, CURRENT: 8.680A
[44.651] (0) RPM: 7402, PWR: 93, VOLTAGE: 10.919V, TEMPERATURE: 44.81C, CURRENT: 7.888A
[44.651] (1) RPM: 7411, PWR: 95, VOLTAGE: 10.937V, TEMPERATURE: 43.87C, CURRENT: 8.744A
[44.651] (2) RPM: 258, PWR: 0, VOLTAGE: 10.920V, TEMPERATURE: 44.53C, CURRENT: -0.144A
[44.651] (3) RPM: 7390, PWR: 95, VOLTAGE: 10.914V, TEMPERATURE: 42.82C, CURRENT: 8.680A
[44.661] (0) RPM: 7402, PWR: 93, VOLTAGE: 10.919V, TEMPERATURE: 44.81C, CURRENT: 7.888A
[44.661] (1) RPM: 7411, PWR: 95, VOLTAGE: 10.937V, TEMPERATURE: 43.87C, CURRENT: 8.744A
[44.661] (2) RPM: 258, PWR: 0, VOLTAGE: 10.920V, TEMPERATURE: 44.53C, CURRENT: -0.144A
[44.661] (3) RPM: 7390, PWR: 95, VOLTAGE: 10.914V, TEMPERATURE: 42.82C, CURRENT: 8.680A
[44.671] (0) RPM: 7402, PWR: 93, VOLTAGE: 10.919V, TEMPERATURE: 44.81C, CURRENT: 7.888A
[44.671] (1) RPM: 7406, PWR: 95, VOLTAGE: 10.926V, TEMPERATURE: 43.96C, CURRENT: 8.688A
[44.671] (2) RPM: 298, PWR: 0, VOLTAGE: 10.921V, TEMPERATURE: 44.51C, CURRENT: -0.152A
[44.671] (3) RPM: 7390, PWR: 95, VOLTAGE: 10.914V, TEMPERATURE: 42.82C, CURRENT: 8.680A
[44.680] (0) RPM: 7402, PWR: 93, VOLTAGE: 10.919V, TEMPERATURE: 44.81C, CURRENT: 7.888A
[44.680] (1) RPM: 7406, PWR: 95, VOLTAGE: 10.926V, TEMPERATURE: 43.96C, CURRENT: 8.688A
[44.680] (2) RPM: 298, PWR: 0, VOLTAGE: 10.921V, TEMPERATURE: 44.51C, CURRENT: -0.152A
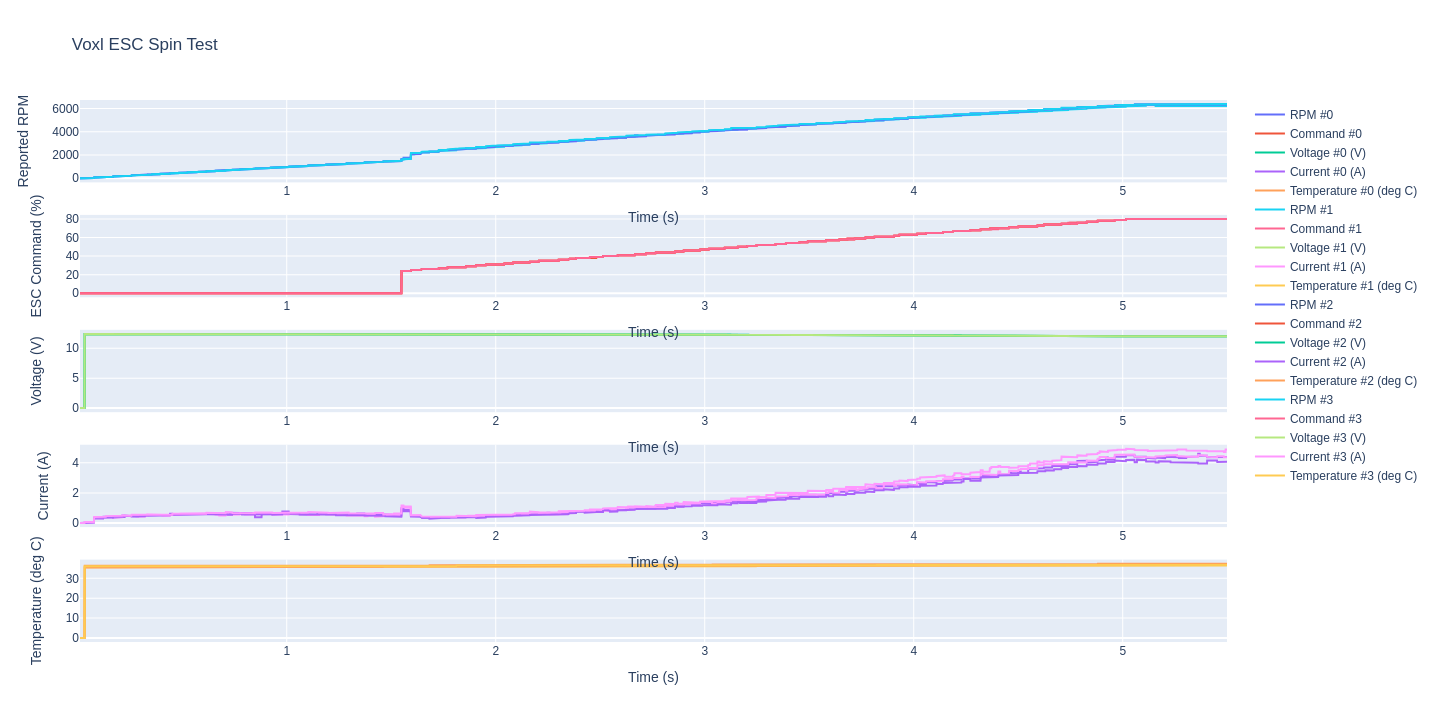
Case-2 ./voxl-esc-spin.py --id 255 --rpm 6000 --timeout 180
[53.921] (3) RPM: 5986, PWR: 81, VOLTAGE: 10.599V, TEMPERATURE: 41.14C, CURRENT: 7.016A
[53.930] (0) RPM: 5983, PWR: 85, VOLTAGE: 10.588V, TEMPERATURE: 46.06C, CURRENT: 8.576A
[53.930] (1) RPM: 5987, PWR: 82, VOLTAGE: 10.590V, TEMPERATURE: 47.33C, CURRENT: 7.384A
[53.930] (2) RPM: 6000, PWR: 80, VOLTAGE: 10.583V, TEMPERATURE: 46.07C, CURRENT: 6.608A
[53.930] (3) RPM: 5986, PWR: 81, VOLTAGE: 10.599V, TEMPERATURE: 41.14C, CURRENT: 7.016A
[53.941] (0) RPM: 5983, PWR: 85, VOLTAGE: 10.588V, TEMPERATURE: 46.06C, CURRENT: 8.576A
[53.941] (1) RPM: 5987, PWR: 82, VOLTAGE: 10.590V, TEMPERATURE: 47.33C, CURRENT: 7.384A
[53.941] (2) RPM: 6000, PWR: 80, VOLTAGE: 10.583V, TEMPERATURE: 46.07C, CURRENT: 6.608A
[53.941] (3) RPM: 5986, PWR: 81, VOLTAGE: 10.599V, TEMPERATURE: 41.14C, CURRENT: 7.016A
[53.951] (0) RPM: 5983, PWR: 85, VOLTAGE: 10.588V, TEMPERATURE: 46.06C, CURRENT: 8.576A
[53.951] (1) RPM: 5987, PWR: 82, VOLTAGE: 10.590V, TEMPERATURE: 47.33C, CURRENT: 7.384A
[53.951] (2) RPM: 6022, PWR: 80, VOLTAGE: 10.586V, TEMPERATURE: 46.10C, CURRENT: 6.736A
[53.951] (3) RPM: 5986, PWR: 81, VOLTAGE: 10.599V, TEMPERATURE: 41.14C, CURRENT: 7.016A
[53.960] (0) RPM: 5987, PWR: 85, VOLTAGE: 10.590V, TEMPERATURE: 45.99C, CURRENT: 8.600A
[53.960] (1) RPM: 5987, PWR: 82, VOLTAGE: 10.590V, TEMPERATURE: 47.33C, CURRENT: 7.384A
[53.960] (2) RPM: 6022, PWR: 80, VOLTAGE: 10.586V, TEMPERATURE: 46.10C, CURRENT: 6.736A
[53.960] (3) RPM: 5980, PWR: 81, VOLTAGE: 10.580V, TEMPERATURE: 41.28C, CURRENT: 7.096A
[53.971] (0) RPM: 5987, PWR: 85, VOLTAGE: 10.590V, TEMPERATURE: 45.99C, CURRENT: 8.600A
[53.971] (1) RPM: 5987, PWR: 82, VOLTAGE: 10.590V, TEMPERATURE: 47.33C, CURRENT: 7.384A
[53.971] (2) RPM: 6022, PWR: 80, VOLTAGE: 10.586V, TEMPERATURE: 46.10C, CURRENT: 6.736A
[53.971] (3) RPM: 5980, PWR: 81, VOLTAGE: 10.580V, TEMPERATURE: 41.28C, CURRENT: 7.096A
[53.981] (0) RPM: 5987, PWR: 85, VOLTAGE: 10.590V, TEMPERATURE: 45.99C, CURRENT: 8.600A
[53.981] (1) RPM: 5980, PWR: 82, VOLTAGE: 10.594V, TEMPERATURE: 47.33C, CURRENT: 7.464A
[53.981] (2) RPM: 5981, PWR: 81, VOLTAGE: 10.589V, TEMPERATURE: 46.02C, CURRENT: 6.768A
[53.981] (3) RPM: 5980, PWR: 81, VOLTAGE: 10.580V, TEMPERATURE: 41.28C, CURRENT: 7.096A
[53.991] (0) RPM: 5987, PWR: 85, VOLTAGE: 10.590V, TEMPERATURE: 45.99C, CURRENT: 8.600A
[53.991] (1) RPM: 5980, PWR: 82, VOLTAGE: 10.594V, TEMPERATURE: 47.33C, CURRENT: 7.464A
[53.991] (2) RPM: 5981, PWR: 81, VOLTAGE: 10.589V, TEMPERATURE: 46.02C, CURRENT: 6.768A
[53.991] (3) RPM: 5980, PWR: 81, VOLTAGE: 10.580V, TEMPERATURE: 41.28C, CURRENT: 7.096A
[54.000] (0) RPM: 5987, PWR: 85, VOLTAGE: 10.590V, TEMPERATURE: 45.99C, CURRENT: 8.600A
[54.000] (1) RPM: 5980, PWR: 82, VOLTAGE: 10.594V, TEMPERATURE: 47.33C, CURRENT: 7.464A
[54.000] (2) RPM: 5981, PWR: 81, VOLTAGE: 10.589V, TEMPERATURE: 46.02C, CURRENT: 6.768A
[54.000] (3) RPM: 5989, PWR: 81, VOLTAGE: 10.586V, TEMPERATURE: 41.17C, CURRENT: 6.968A
[54.011] (0) RPM: 4353, PWR: 89, VOLTAGE: 10.466V, TEMPERATURE: 46.01C, CURRENT: 7.488A
[54.011] (1) RPM: 827, PWR: 46, VOLTAGE: 10.301V, TEMPERATURE: 47.05C, CURRENT: 15.744A
[54.011] (2) RPM: 5981, PWR: 81, VOLTAGE: 10.589V, TEMPERATURE: 46.02C, CURRENT: 6.768A
[54.011] (3) RPM: 5989, PWR: 81, VOLTAGE: 10.586V, TEMPERATURE: 41.17C, CURRENT: 6.968A
[54.021] (0) RPM: 4353, PWR: 89, VOLTAGE: 10.466V, TEMPERATURE: 46.01C, CURRENT: 7.488A
[54.021] (1) RPM: 827, PWR: 46, VOLTAGE: 10.301V, TEMPERATURE: 47.05C, CURRENT: 15.744A
[54.021] (2) RPM: 5981, PWR: 81, VOLTAGE: 10.589V, TEMPERATURE: 46.02C, CURRENT: 6.768A
[54.021] (3) RPM: 5989, PWR: 81, VOLTAGE: 10.586V, TEMPERATURE: 41.17C, CURRENT: 6.968A
[54.031] (0) RPM: 4353, PWR: 89, VOLTAGE: 10.466V, TEMPERATURE: 46.01C, CURRENT: 7.488A
[54.031] (1) RPM: 827, PWR: 46, VOLTAGE: 10.301V, TEMPERATURE: 47.05C, CURRENT: 15.744A
[54.031] (2) RPM: 5985, PWR: 82, VOLTAGE: 10.376V, TEMPERATURE: 46.08C, CURRENT: 6.968A
[54.031] (3) RPM: 5989, PWR: 81, VOLTAGE: 10.586V, TEMPERATURE: 41.17C, CURRENT: 6.968A
[54.041] (0) RPM: 4353, PWR: 89, VOLTAGE: 10.466V, TEMPERATURE: 46.01C, CURRENT: 7.488A
[54.041] (1) RPM: 827, PWR: 46, VOLTAGE: 10.301V, TEMPERATURE: 47.05C, CURRENT: 15.744A
[54.041] (2) RPM: 5985, PWR: 82, VOLTAGE: 10.376V, TEMPERATURE: 46.08C, CURRENT: 6.968A
[54.041] (3) RPM: 5983, PWR: 82, VOLTAGE: 10.414V, TEMPERATURE: 41.18C, CURRENT: 7.376A
[54.051] (0) RPM: 660, PWR: 48, VOLTAGE: 10.444V, TEMPERATURE: 45.95C, CURRENT: 13.728A
[54.051] (1) RPM: 827, PWR: 46, VOLTAGE: 10.301V, TEMPERATURE: 47.05C, CURRENT: 15.744A
[54.051] (2) RPM: 5985, PWR: 82, VOLTAGE: 10.376V, TEMPERATURE: 46.08C, CURRENT: 6.968A
[54.051] (3) RPM: 5983, PWR: 82, VOLTAGE: 10.414V, TEMPERATURE: 41.18C, CURRENT: 7.376A
[54.060] (0) RPM: 660, PWR: 48, VOLTAGE: 10.444V, TEMPERATURE: 45.95C, CURRENT: 13.728A
[54.060] (1) RPM: 827, PWR: 46, VOLTAGE: 10.301V, TEMPERATURE: 47.05C, CURRENT: 15.744A
[54.060] (2) RPM: 5985, PWR: 82, VOLTAGE: 10.376V, TEMPERATURE: 46.08C, CURRENT: 6.968A
[54.060] (3) RPM: 5983, PWR: 82, VOLTAGE: 10.414V, TEMPERATURE: 41.18C, CURRENT: 7.376A
[54.070] (0) RPM: 660, PWR: 48, VOLTAGE: 10.444V, TEMPERATURE: 45.95C, CURRENT: 13.728A
[54.070] (1) RPM: 628, PWR: 44, VOLTAGE: 10.452V, TEMPERATURE: 47.25C, CURRENT: 12.168A
[54.070] (2) RPM: 5990, PWR: 82, VOLTAGE: 10.445V, TEMPERATURE: 45.99C, CURRENT: 6.776A
[54.070] (3) RPM: 5983, PWR: 82, VOLTAGE: 10.414V, TEMPERATURE: 41.18C, CURRENT: 7.376A
[54.081] (0) RPM: 660, PWR: 48, VOLTAGE: 10.444V, TEMPERATURE: 45.95C, CURRENT: 13.728A
[54.081] (1) RPM: 628, PWR: 44, VOLTAGE: 10.452V, TEMPERATURE: 47.25C, CURRENT: 12.168A
[54.081] (2) RPM: 5990, PWR: 82, VOLTAGE: 10.445V, TEMPERATURE: 45.99C, CURRENT: 6.776A
[54.081] (3) RPM: 5986, PWR: 82, VOLTAGE: 10.442V, TEMPERATURE: 41.23C, CURRENT: 7.176A
[54.091] (0) RPM: 660, PWR: 48, VOLTAGE: 10.444V, TEMPERATURE: 45.95C, CURRENT: 13.728A
[54.091] (1) RPM: 628, PWR: 44, VOLTAGE: 10.452V, TEMPERATURE: 47.25C, CURRENT: 12.168A
[54.091] (2) RPM: 5990, PWR: 82, VOLTAGE: 10.445V, TEMPERATURE: 45.99C, CURRENT: 6.776A
[54.091] (3) RPM: 5986, PWR: 82, VOLTAGE: 10.442V, TEMPERATURE: 41.23C, CURRENT: 7.176A
[54.100] (0) RPM: 0, PWR: 0, VOLTAGE: 10.542V, TEMPERATURE: 46.08C, CURRENT: 2.504A
[54.100] (1) RPM: 0, PWR: 0, VOLTAGE: 10.619V, TEMPERATURE: 47.60C, CURRENT: 12.488A
[54.100] (2) RPM: 5990, PWR: 82, VOLTAGE: 10.445V, TEMPERATURE: 45.99C, CURRENT: 6.776A
[54.100] (3) RPM: 5986, PWR: 82, VOLTAGE: 10.442V, TEMPERATURE: 41.23C, CURRENT: 7.176A
[54.111] (0) RPM: 0, PWR: 0, VOLTAGE: 10.542V, TEMPERATURE: 46.08C, CURRENT: 2.504A
[54.111] (1) RPM: 0, PWR: 0, VOLTAGE: 10.619V, TEMPERATURE: 47.60C, CURRENT: 12.488A
[54.111] (2) RPM: 5982, PWR: 80, VOLTAGE: 10.755V, TEMPERATURE: 46.11C, CURRENT: 7.160A
[54.111] (3) RPM: 5986, PWR: 82, VOLTAGE: 10.442V, TEMPERATURE: 41.23C, CURRENT: 7.176A