Please reach out here: https://www.modalai.com/pages/blue-uas-cleared-fpv-customer-intake-form
Posts
-
Seeker User Manual -
Re: [voxl2 is not booting](/topic/4984/voxl2-is-not-booting)@Jetson-Nano Given the crash and hardware issues I'd recommend sending this board in for an RMA
-
voxl-suite upgrade@RoyAzriel 1.6.4 release is tested on Starling 2 now, go ahead and use that from the link I emailed you.
-
voxl-suite upgrade@RoyAzriel I'll send you an email with a link to the latest SDK. It is largely untested on starling2-max which is why it isn't available on our public downloads page yet.
-
Software On/Off VTX Power using VOXL FPV 4in1 ESC@PatkirkMartin In order to toggle power via PX4 you can do the following:
Set
GPIO_CTL_CHto the AUX channel you'd like to use for this feature, e.g.,3forRC_MAP_AUX3.Set the corresponding
RC_MAP_AUX#to the button/switch you want to use. e.g.10for channel 10 on your RC transmitter. -
GPIO on DSP?@jmltt Apologies, context was lost. For clarity, sentinel was the last dev drone in which spektrum rc was supported and SDK 1.5.0 was the last SDK tested on said platform. Later SDKs have different gpio defaults which is why you're running into this issue
-
GPIO on DSP?@jmltt The last ModalAI supported SDK on the Sentinel platform is SDK 1.5.0. Which doesn't mean that you won't success with newer SDKs, we just haven't tested with it.
-
Starling 2 max Not detecting Wifi hardware -
Latest SDK versions - How to access?@nl_vdi Here is a link to the latest beta: https://storage.googleapis.com/platform-beta-releases/voxl2/voxl2_SDK_1.6.4-beta8.tar.gz
-
LTE Modem v2 Pro@Michael-Hatton Did you run through the
voxl-configure-modemsetup in order to configure APN, etc?
VOXL Modems
ModalAI technical documentation for VOXL and VOXL 2 Companion Computers for PX4 and ArduPilot Obstacle Avoidance and GPS-denied navigation, assembled in the USA
ModalAI Technical Docs (docs.modalai.com)
-
LTE v2 VPN@Barry-Hammond https://docs.modalai.com/voxl-streamer/#how-to-stream-video-with-rtsp-on-voxl
Quality greatly depends on your LTE coverage and VPN performance. I recommend lowering the bitrate in
/etc/modalai/voxl-streamer.confuntil you're happy with the response rate.Tailscale can add overhead as well and our recent LTE testing has involved hosting a custom WireGuard server.
-
Voxl 2 mini flashing SDK through raspberry pi 5 bricking voxl@mkriesel It's possible the kernel you're flashing is incorrect. Can you provide the full terminal output of the install?
-
Technical Support: Sudden Loss of Control and Connectivity - VOXL 2 -
voxl-vtx and voxl-vrx source not on gitlab?@Alan_S The voxl-vtx repository is currently private, the source code for both voxl-vtx and voxl-vrx are contained within.
-
5G Modem Cannot Connect to Private 5G Network -
Cannot Download QDL Image File@Jesus-Cardenas We recently moved our downloads page, I'll get an answer for you shortly.
-
HDMI output from Seeker Vision FPV Goggles@David-Avery See the following graphic.
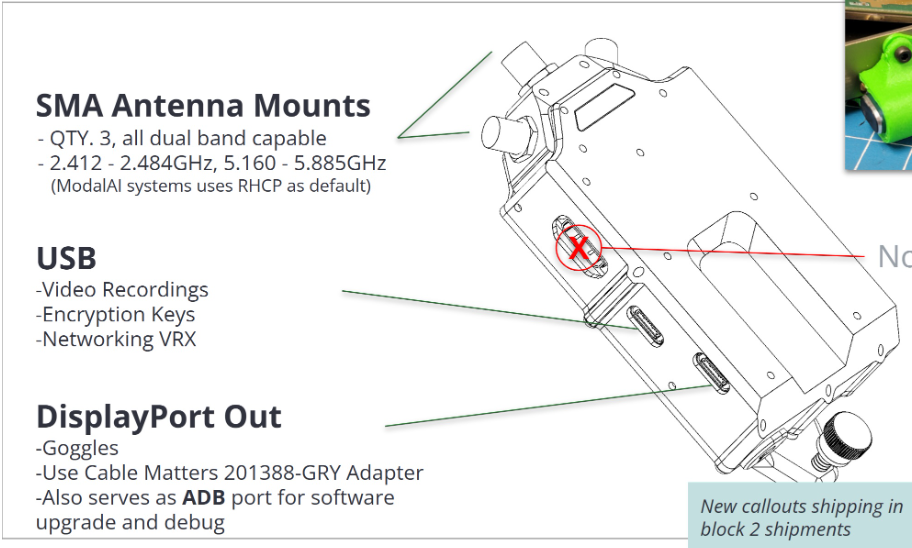
You can connect a USB-C to hdmi adapter to the USB-C labeled "DisplayPort Out"
I recommend using the following adapter: https://www.amazon.com/Cable-Matters-48Gbps-Adapter-Supporting/dp/B08MSWMXT4?th=1
No software configuration changes are needed.
-
Unable to Bind VOXL 2 - Starling 2 to Commando 8 (915 v2) radio@MikeR Does your commando 8 have an orq ghost transmitter module connected to it? If it doesn't then it is likely using ELRS which is not compatible with a ghost receiver.
You'd need a orqa transmitter like this one: https://shop.orqafpv.com/products/orqa-orqa-fpv-ctrl-radio-controller
Maybe your other drone had an ELRS receiver on it?
-
PX4 -> QGC connection through USB for VOXL2@Sarika-Sharma It's not something we currently support