@zauberflote1 where is beta firmware? I cant find it in the download page.
Latest posts made by Muqing Cao
-
RE: starling 2 max qvio vs open-vins performance issuesposted in Ask your questions right here!
-
RE: starling 2 max qvio vs open-vins performance issuesposted in Ask your questions right here!
@zauberflote1 thanks for your info. When will 1.6.3 be released? I see in the instruction that updating sdk will reset all config files, since we use starling 2 max, do we have to change the configs file to the startling-specific configs after update?
-
RE: starling 2 max qvio vs open-vins performance issuesposted in Ask your questions right here!
@Zachary-Lowell-0 Thanks! Indeed we also had the problem of height estimate unstable in px4, we will try barometer calibration.
But VIO doesnt use barometer and we still need good VIO position. Any suggestion on improving the VIO odometry output? -
starling 2 max qvio vs open-vins performance issuesposted in Ask your questions right here!
HI,
we are using starling 2 max and are testing the vio performance. Both vio methods performs well in handhold moving tests. We fly the drone manually in a feature-rich indoor environment. Qvio performs ok during takeoff but drifts away after some yawing motions of the drone. Open-vins drifts ~1m downwards during takeoff but maintains well after takeoff.
We need a good vio performance for indoor test, what is your recommendation? The performance is certainly affected by the imu noise, are there any setups or parameters that we can tune?
Thanks! -
RE: Starling 2 max no odometry even with qvio enabledposted in Ask your questions right here!
@Zachary-Lowell-0 after turning off open-vins and rebooting it works. thanks!
-
RE: Starling 2 max no odometry even with qvio enabledposted in Ask your questions right here!
@Eric-Katzfey any idea how to resolve this? we need to get the position mode flying soon. thanks.
-
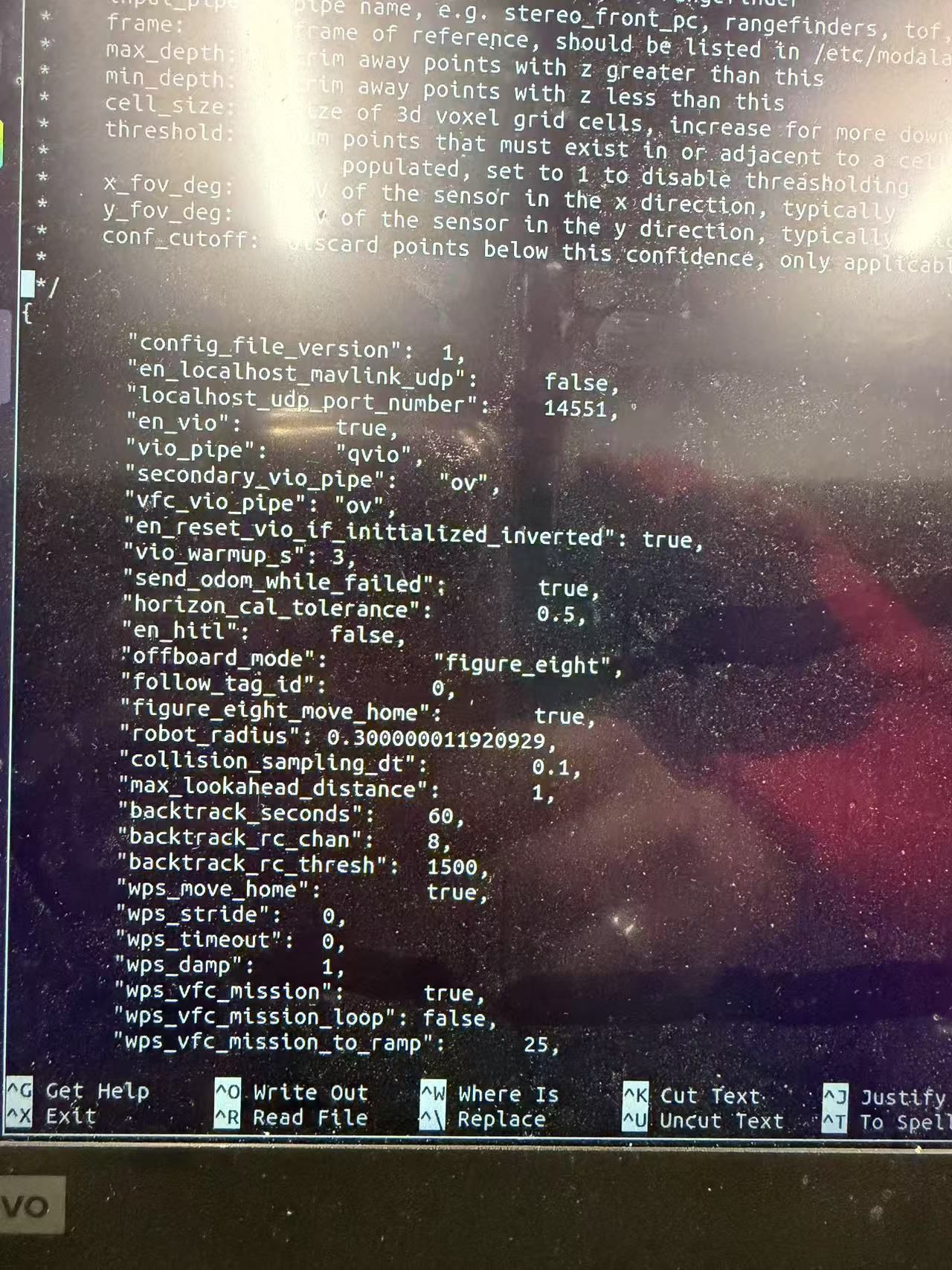
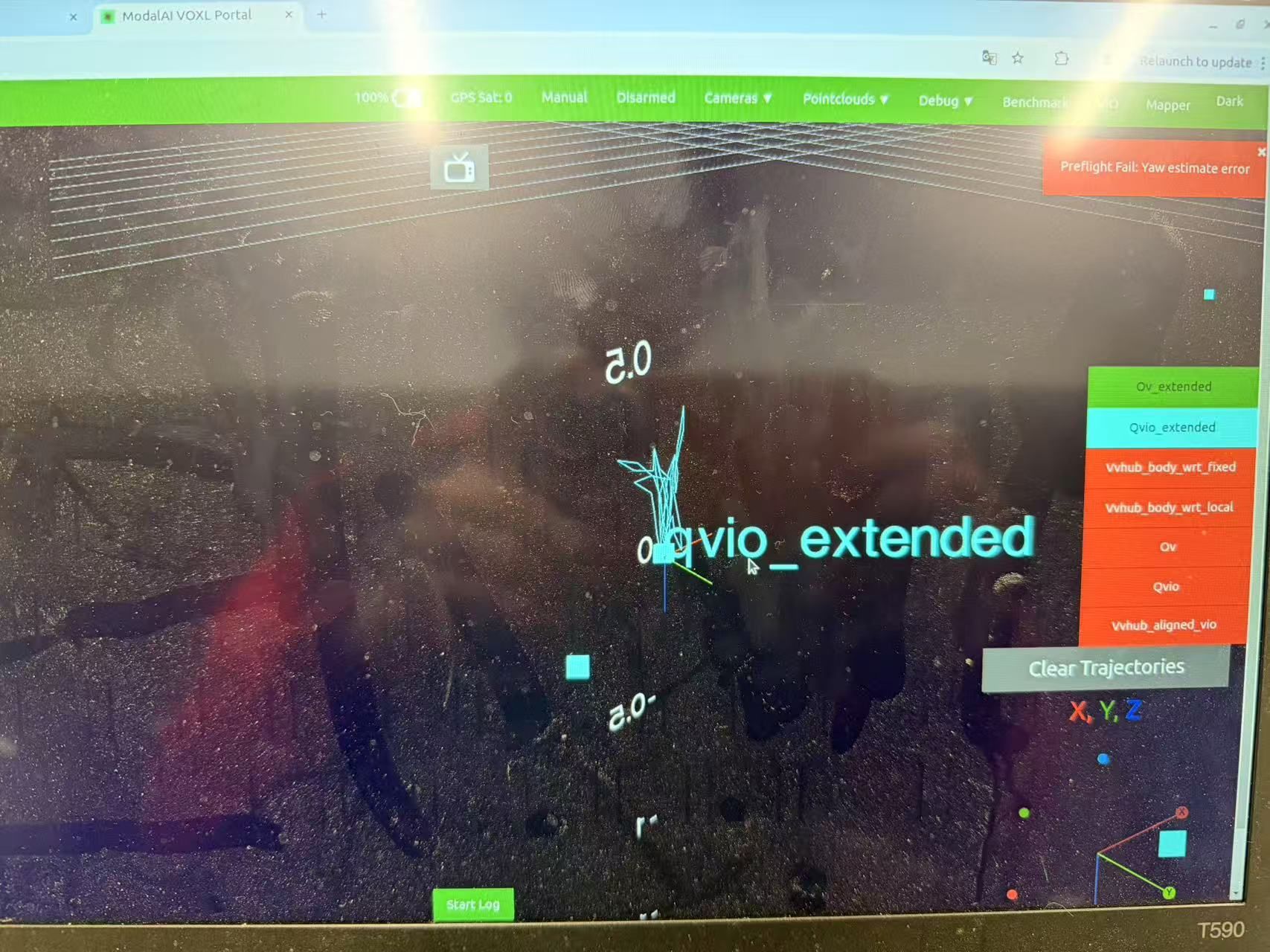
Starling 2 max no odometry even with qvio enabledposted in Ask your questions right here!
we have got a starling 2 max and enabled the qvio service. In GUI the qvio outputs good odometry:
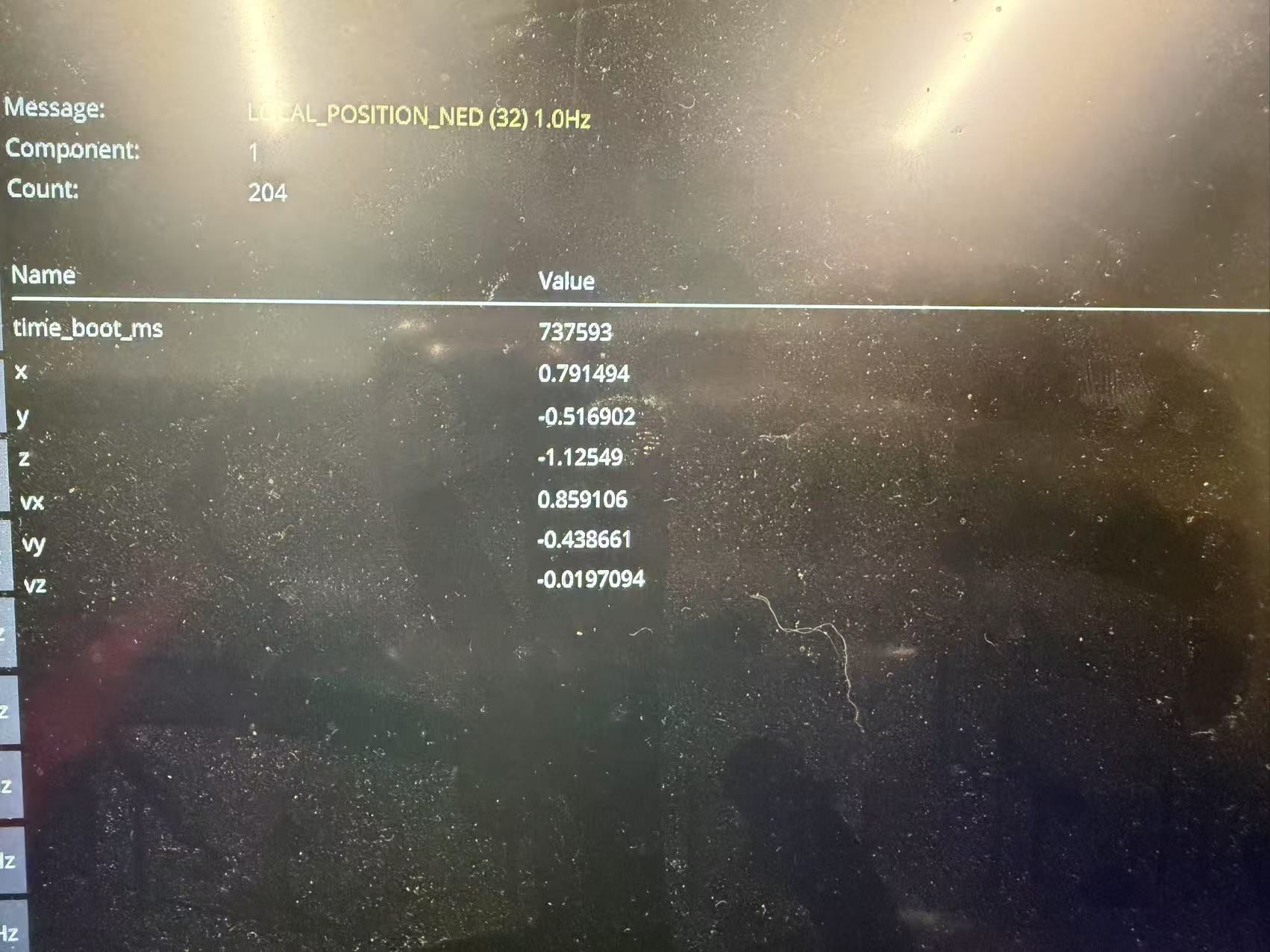
However, in px4 mavlink list, we cannot find the odometry mavlink message. And the local position estimate gives very high velocity even when the drone is static:
This is the list of qvio services running: