Starling 2 max no odometry even with qvio enabled
-
we have got a starling 2 max and enabled the qvio service. In GUI the qvio outputs good odometry:
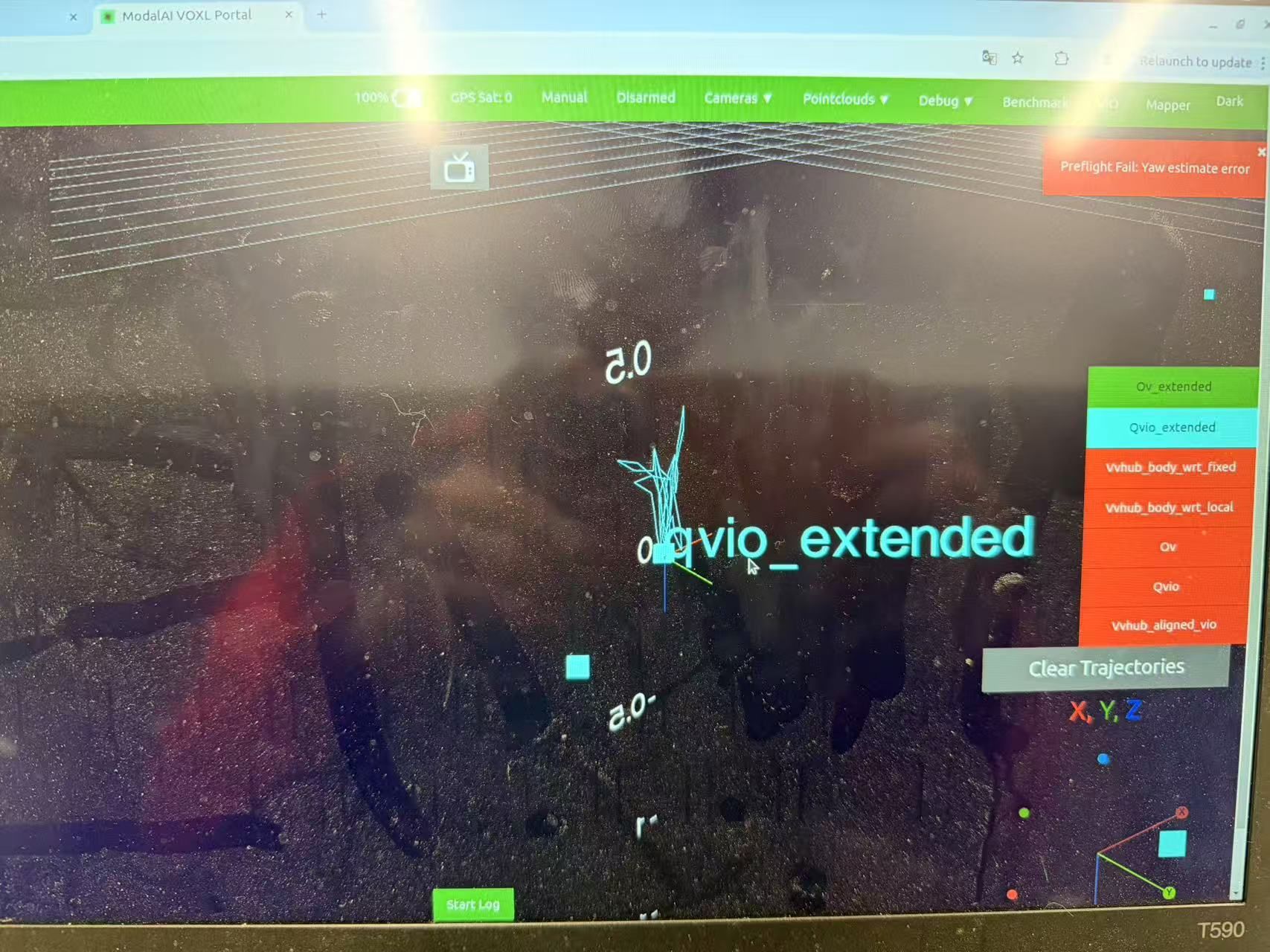
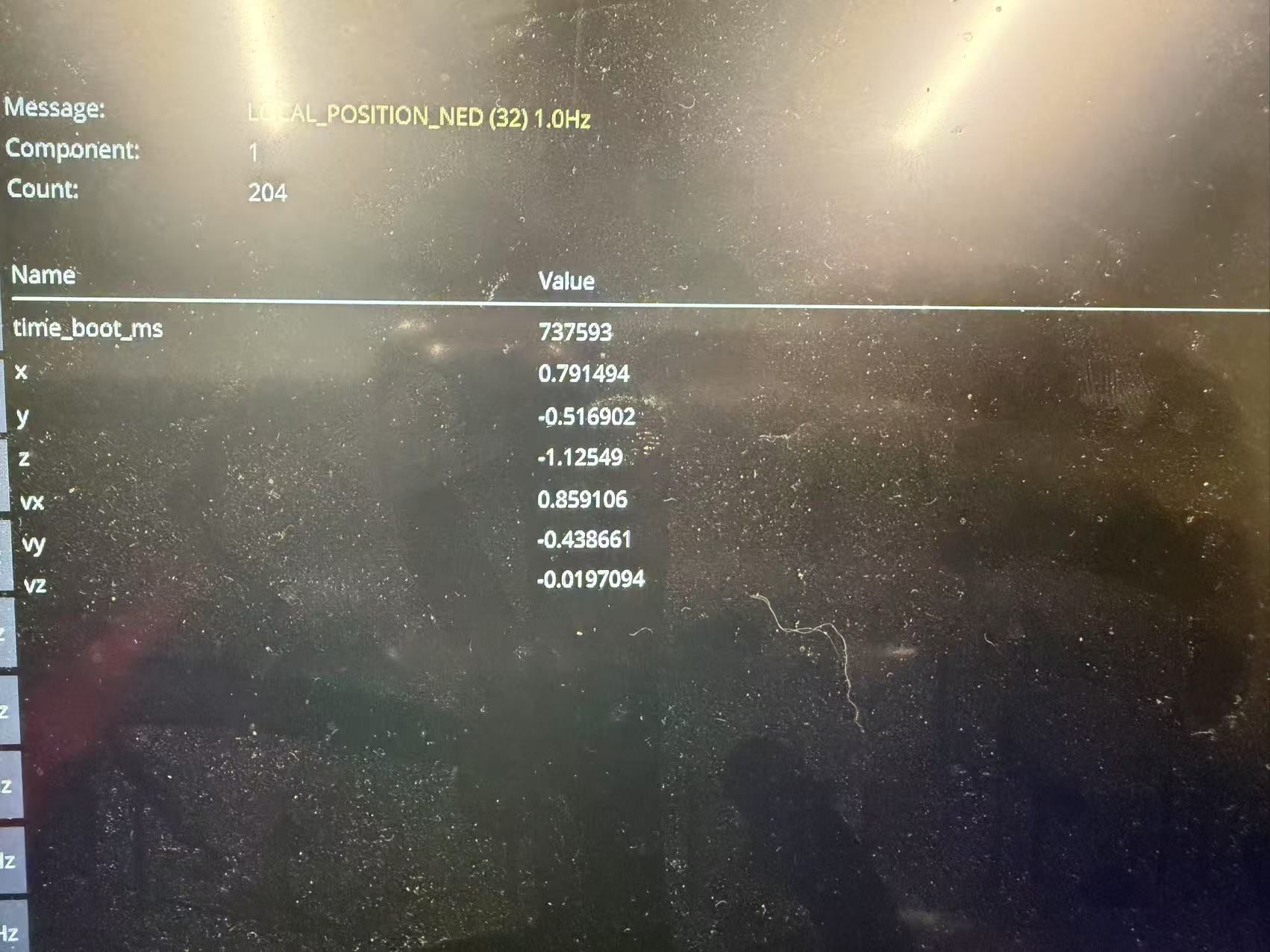
However, in px4 mavlink list, we cannot find the odometry mavlink message. And the local position estimate gives very high velocity even when the drone is static:
This is the list of qvio services running:

-
we have got a starling 2 max and enabled the qvio service. In GUI the qvio outputs good odometry:
However, in px4 mavlink list, we cannot find the odometry mavlink message. And the local position estimate gives very high velocity even when the drone is static:
This is the list of qvio services running:
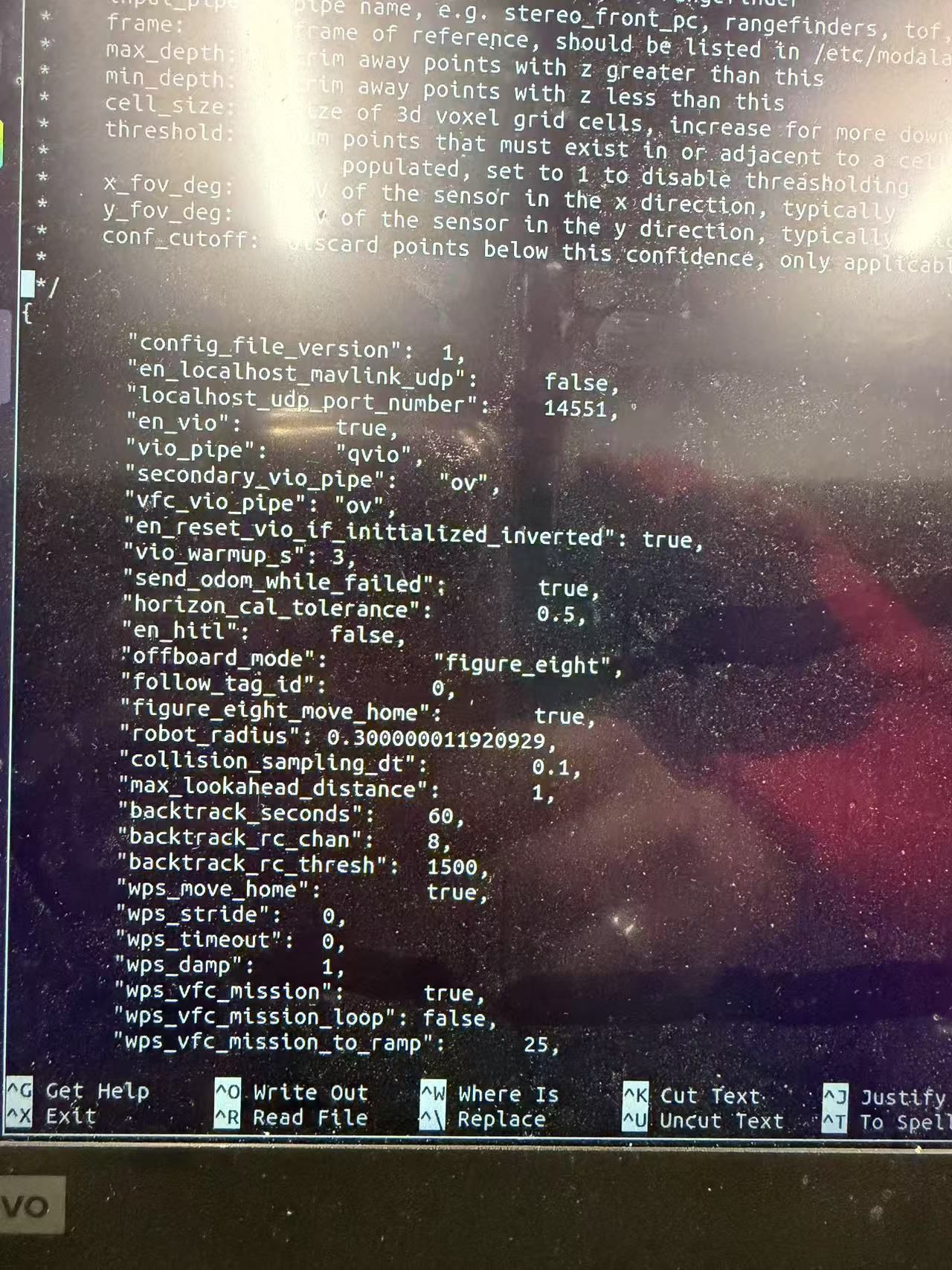
@Muqing-Cao In the voxl-vision-hub configuration file
/etc/modalai/voxl-vision-hub.confhow is the parameteren_vioset? -
@Muqing-Cao In the voxl-vision-hub configuration file
/etc/modalai/voxl-vision-hub.confhow is the parameteren_vioset?@Eric-Katzfey
en_vio is set to true
-
@Eric-Katzfey any idea how to resolve this? we need to get the position mode flying soon. thanks.
-
@Eric-Katzfey any idea how to resolve this? we need to get the position mode flying soon. thanks.
@Muqing-Cao
Can you confirm your SDK version? -
@Muqing-Cao
Can you confirm your SDK version?@zauberflote1 it's 1.5.1
-
@Muqing-Cao you have voxl-open-vins-server and voxl-qvio-server running at the same time. Only one can be run - modalAI defaulted to open-vins as the main method for positioning - if you have both running, you are bound to run into conflicting errors.
-
@Muqing-Cao you have voxl-open-vins-server and voxl-qvio-server running at the same time. Only one can be run - modalAI defaulted to open-vins as the main method for positioning - if you have both running, you are bound to run into conflicting errors.
@Zachary-Lowell-0 after turning off open-vins and rebooting it works. thanks!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login