Hi @taiwohazeez,
The " /fmu/in" prefix is used for sending data to the autopilot - you're never going to receive data from the autopilot listening to that topic.
Look at the "/fmu/out" topics to see messages coming from the autopilot.
Best,
Ted
Hi @taiwohazeez,
The " /fmu/in" prefix is used for sending data to the autopilot - you're never going to receive data from the autopilot listening to that topic.
Look at the "/fmu/out" topics to see messages coming from the autopilot.
Best,
Ted
Hi @Judoor-0,
That mavlink message will result in a vehicle_visual_odometry uORB see the two links below:
If you go into the mavlink console and type "listener vehicle_visual_odometry" do you see messages with the data you're publishing? That's the first step.
The second step is getting that data to fuse. You'll need to worry about transforming the data to be in PX4's coordinate frame as well as 1.15.4 requires you publish real roll, pitch, yaw data not just 0s (does your MoCap system provide that?).
In the end you can check you've done everything correctly by listening to vehicle_local_position and seeing the output of your MoCap system.
@Jing-Yu This is the tof camera - the ring around it rotates. I'd watch the output on voxl-portal for TOF-IR as you're rotating it to see if it has any impact.

Hi @Jing-Yu,
It looks like your TOF sensor might be out of focus.
This is what normal output looks like:

You can change the focus by rotating the ring around the TOF sensor. You might want to use a set of pliers but be careful not to scratch the glass.
Hi @Roya-Salehzadeh,
Yep, the points showing up in voxl_mapper_aligned_ptcloud are static (ie. not tied to the vehicle's current pose)
I've never tried to do that so I'm not 100% sure but recording the points with a ros2 bag seems like a reasonable approach
3a. I'm not sure why you would need to do any transformation to plot the data on RViz. Voxl-mapper already does transformations to put the data in a static frame of reference. If you're only seeing it as a live stream this is probably because it's playing one message one after the other. I'm not sure but there might be a setting in RViz to ignore the timestamps or you could potentially do something like set all the timestamps to 1.
3b. Voxl-mapper uses the tof data to generate the map. What are you trying to do by visualizing the tof data?
3c. For visualizing the path I'm not sure if you would need to do transformations or not. This is the line that digests the pose data in voxl-portal. After a little investigating it seems like the /world might be the correct frame_id.
If it were me, I'd start by getting the accumulated map on RViz then plot the odometry inside that map with the /world frame_id and then check if you need to do any additional transformations.
@brahim what're your thoughts on the RViz frame_id for odometry?
Let me know if that helps,
Ted
@Jing-Yu what SDK are you using? My TOF is working with SDK 1.4.5. I'll try to replicate your setup the best I can but I'm suspicious because the TOF IR is working and the TOF depth pipe is receiving frames in your setup. In the meantime, can you try pointing the TOF sensor at something very far away?
That looks good except voxl-mapper doesn't look like it's installed or running. You can install it using the command below. Make sure your starling is connected to wifi else you can adb push the voxl-mapper deb.
$ wget http://voxl-packages.modalai.com/dists/qrb5165/sdk-1.5/binary-arm64/voxl-mapper_0.2.3_arm64.deb
$ dpkg -i voxl-mapper_0.2.3_arm64.deb
After it's installed and running check that you see the map updating on portal and you should see the voxl_mapper_aligned_ptcloud pipe show up as a ros topic.
Hi @taiwohazeez,
That is the cable that powers the VOXL. I'm suggesting you leave that plugged in and disconnect everything else. I see you still have the VOXL 2 WiFi Add-on board connected. Disconnect that as well all the cameras on the bottom of the VOXL, ESC, and GPS.
Please have the VOXL powered off while you disconnect everything.
Let me know how it goes,
Ted
Hi @Jing-Yu,
Does the feed for tof_depth change when you move your drone?
Hi @taiwohazeez,
I'd start with unplugging all the peripherals (cameras, wifi, gps, rc, etc) so you just have a bare voxl connected to a power module and check if it boots then.
For "voa_pc_out" the default on voxl-vision-hub allows input from both stereo and tof. You can check which inputs you have enabled by checking the voa_input in "/etc/modalai/voxl-vision-hub.conf".
Correct, I would just use "voxl_mapper_aligned_ptcloud"
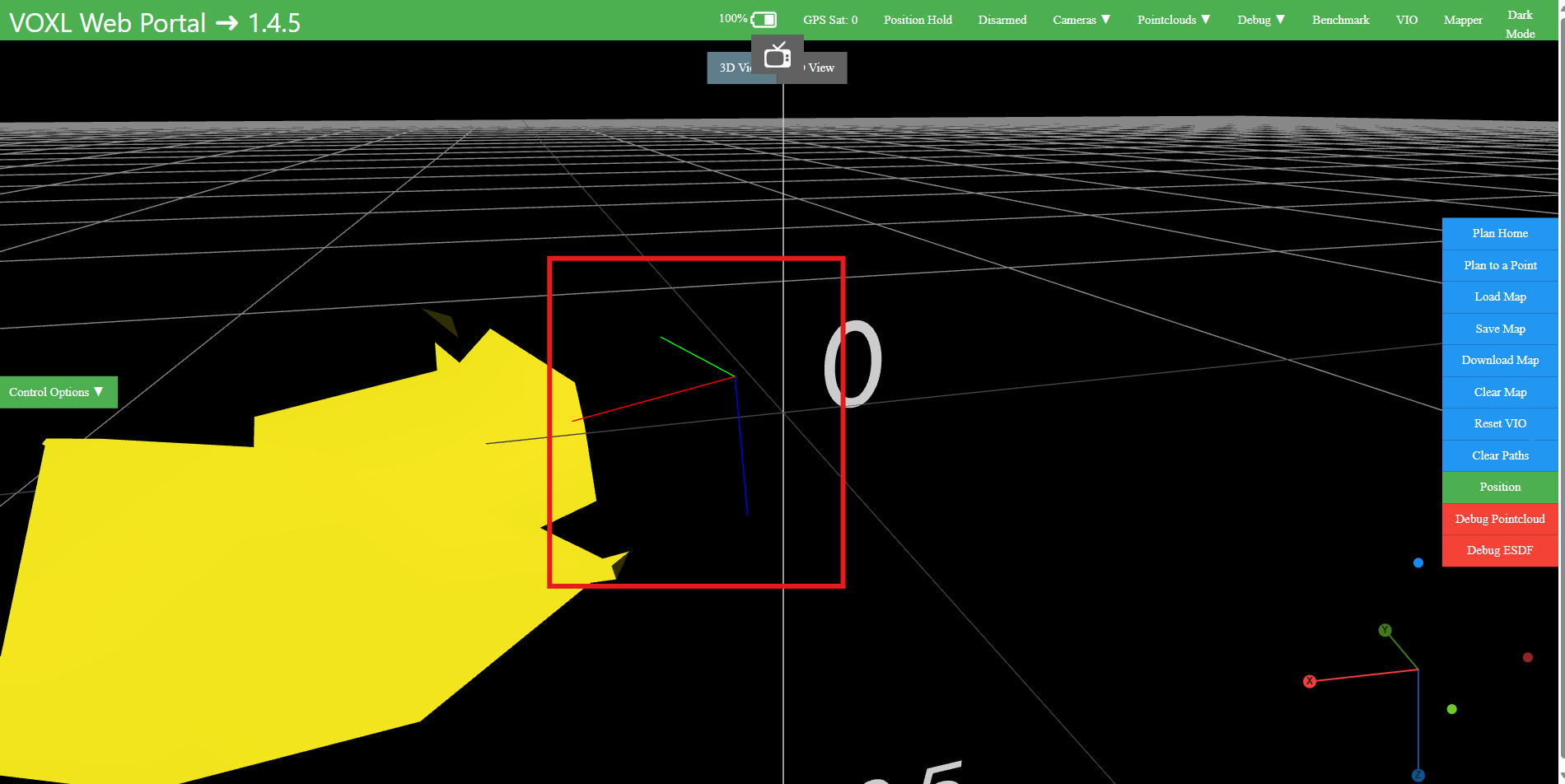
Can you share your output from voxl-inspect-cam -a to make sure your stereo cameras are setup correctly? I would debug this on voxl-portal before moving onto the ROS portion. Do you have tracking cameras setup, and will you be running openvins or voxl-qvio-server. Once that's verified check that you're seeing that pose on voxl-mapper. You should see the orientation show up like in the red box in the picture below or by running voxl-inspect-pose -l.
Hi @Judoor-0,
Cool! Feel free to make a MR or post the link to your code if you want someone to review it.
Hi @Judoor-0,
Interesting I'm assuming you're looking at the rangefinders pipe. I can take a look at your code, or you can make a MR back into mpa-to-ros2.
Also, something to consider is using microdds and subscribing to the "fmu/in/obstacle_distance" topic.
You can either use stereo cameras (alongside running voxl-dfs-server) or tof sensors
It's just a pointcloud representing what the cameras see at the vehicle's current orientation
Have you considered using voxl-mapper alongside listening to the topic "/voxl_mapper_aligned_ptcloud"? Voxl-mapper already does the calculations you mentioned to generate a static pointcloud outputted to that pipe. You can debug your setup by going to voxl-portal and checking that voxl-mapper is outputting a 3D map of your room.
Hope that helps,
Ted
Hi @Ege-Yüceel,
We usually create a volume to those headers when doing something like this but you can install the libmodal pipe package inside the docker container like this if you want.
wget http://voxl-packages.modalai.com/dists/qrb5165/sdk-1.5/binary-arm64/libmodal-pipe_2.13.1_arm64.deb
dpkg -i libmodal-pipe_2.13.1_arm64.deb
**Note change sdk-1.5 to whatever sdk version you're on
So there's no bug in mpa-to-ros2. I agree this is a little confusing so maybe we need to change it, but at the moment when you connect two cameras with COMBO_MODE the data shows up in the same pipe.
This means that the ROS topic "/stereo" will have both of the images stacked on top of each other, so for the time being you'll have to write some code to separate the two.
Hi @cguzikowski,
I'm not getting that issue when I have them connected on separate ports, is that an option for you?
There might be a bug in mpa-to-ros2 when using COMBO_MODE, but I'll need more time to check that out.
Hi @Judoor-0,
So I'm not aware of any service that publishes pointcloud data with the format FLOAT_XYZRGB. I know that when you're using voxl-mapper, voxl-portal receives point cloud data with the format FLOAT_XYZC (c for confidence) on the pipe "voxl_mapper_aligned_ptcloud". It then uses the confidence to color the map.
I gave this a test on my end, and I think I may have found a bug in voxl-mpa-to-ros2 where it won't acknowledge pointcloud data other than FLOAT_XYZ even after verifying FLOAT_XYZC is being published. I'll look into it, but you can get started by setting up voxl-mapper because you'll need to listen on the topic "voxl_mapper_aligned_ptcloud".
Here's some instructions for setting up voxl-mapper:
https://docs.modalai.com/voxl-mapper/
@taiwohazeez Could you post the error and we can take a look?
Also here's an easier way of installing it if you just want to run this script on the voxl.
wget http://voxl-packages.modalai.com/dists/qrb5165/sdk-1.5/binary-arm64/voxl-ros2-foxy_0.0.1_arm64.deb
wget http://voxl-packages.modalai.com/dists/qrb5165/sdk-1.5/binary-arm64/voxl-mpa-to-ros2_0.0.7_arm64.deb
sudo dpkg -i voxl-ros2-foxy
sudo dpkg -i voxl-mpa-to-ros2
voxl-configure-mpa-to-ros2
We recently ran into an issue with the VOXL2 where the servos weren't starting up every time connected via the M0065 expansion board. Found out it was because the VOXL wasn't supplying enough current to power the servos.
Fixed by powering the servos directly from the battery through a 5V UBEC.
