Hi,
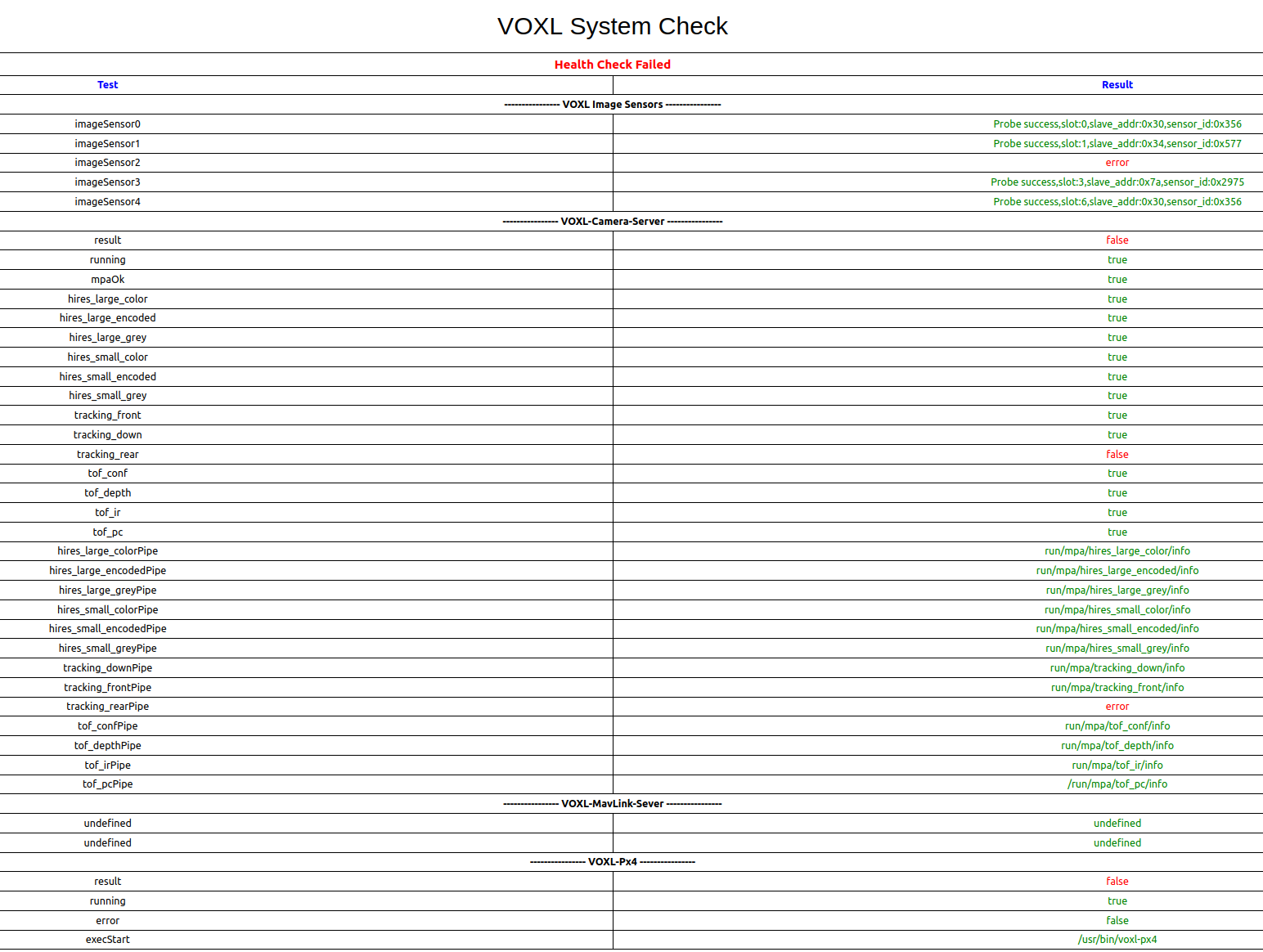
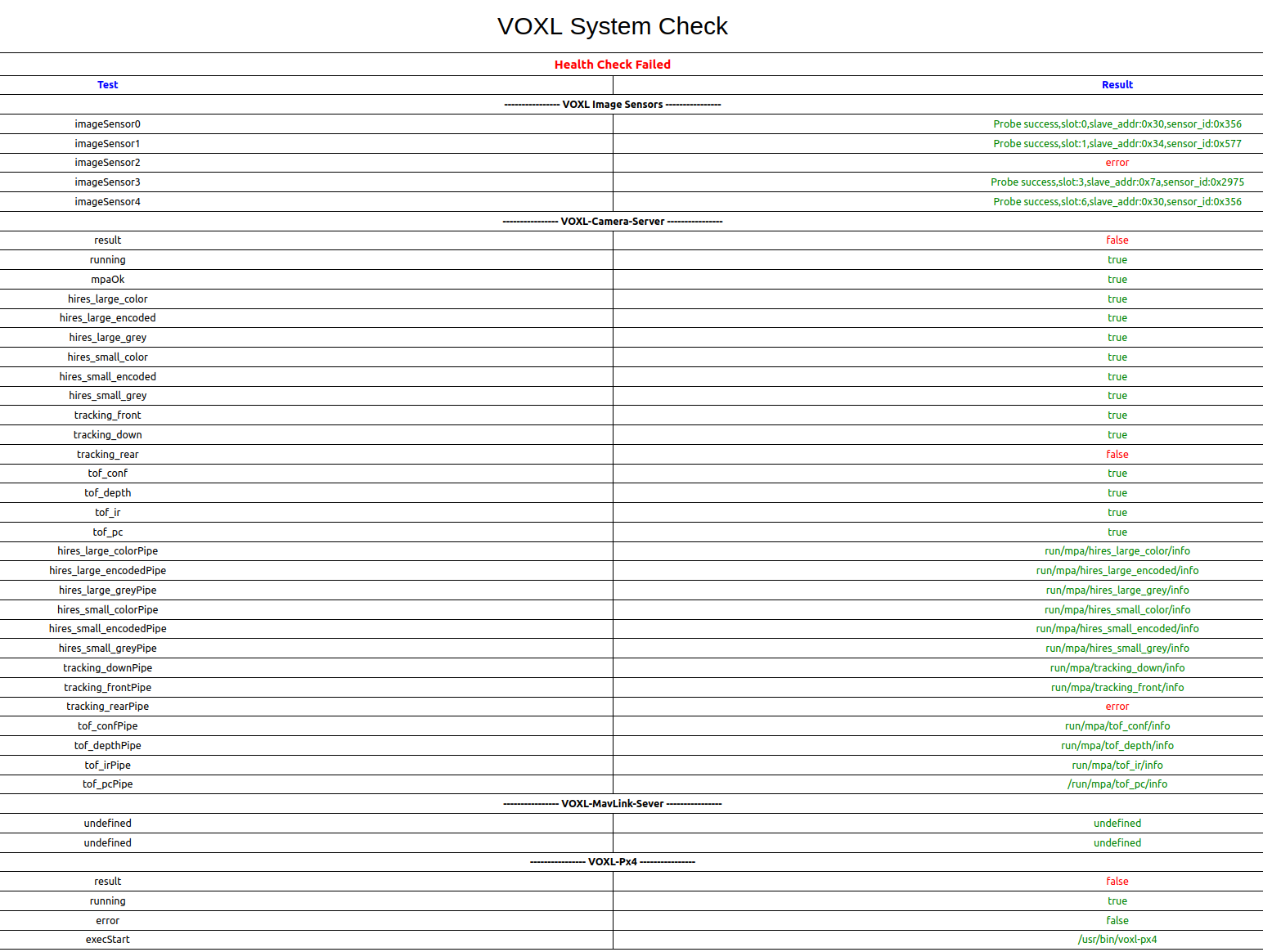
The rear tracking camera on my Starling 2 UAV is not working and doesn't show up on the voxl portal (screenshot attached below). How can we resolve this? Additionally, would this error have an effect on the QVIO blowup issue?
The Starling 2 is in C27 configuration. The output of “voxl-camera-server -l” is as follows:
voxl2:~$ voxl-camera-server -l
existing instance of voxl-camera-server found, attempting to stop it
DEBUG: Attempting to open the hal module
DEBUG: SUCCESS: Camera module opened on attempt 0
DEBUG: ----------- Number of cameras: 4
DEBUG: Cam idx: 0, Cam slot: 0, Slave Address: 0x0030, Sensor Id: 0x0356
DEBUG: Cam idx: 1, Cam slot: 1, Slave Address: 0x0034, Sensor Id: 0x0577
DEBUG: Cam idx: 2, Cam slot: 3, Slave Address: 0x007A, Sensor Id: 0x2975
DEBUG: Cam idx: 3, Cam slot: 6, Slave Address: 0x0030, Sensor Id: 0x0356
DEBUG: Note: This list comes from the HAL module and may not be indicative
DEBUG: of configurations that have full pipelines
DEBUG: Number of cameras: 4
====================================
Stats for camera: 0
ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
1280 x 800
1280 x 800
ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_RAW10
1280 x 800 HAL_PIXEL_FORMAT_RAW12
1280 x 800 HAL_PIXEL_FORMAT_RAW16
1280 x 800 HAL_PIXEL_FORMAT_RAW_OPAQUE
ANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 1596
ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
1596
ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 1318629735ns
====================================
Stats for camera: 1
ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
4056 x 3040
3840 x 2160
1920 x 1080
1920 x 1080
1920 x 1080
1280 x 720
1280 x 720
ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
4056 x 3040 HAL_PIXEL_FORMAT_YCbCr_420_888
4056 x 3040 HAL_PIXEL_FORMAT_BLOB
4000 x 3000 HAL_PIXEL_FORMAT_YCbCr_420_888
4000 x 3000 HAL_PIXEL_FORMAT_BLOB
3840 x 2160 HAL_PIXEL_FORMAT_YCbCr_420_888
3840 x 2160 HAL_PIXEL_FORMAT_BLOB
3264 x 2448 HAL_PIXEL_FORMAT_YCbCr_420_888
3264 x 2448 HAL_PIXEL_FORMAT_BLOB
3200 x 2400 HAL_PIXEL_FORMAT_YCbCr_420_888
3200 x 2400 HAL_PIXEL_FORMAT_BLOB
2976 x 2976 HAL_PIXEL_FORMAT_YCbCr_420_888
2976 x 2976 HAL_PIXEL_FORMAT_BLOB
2688 x 1512 HAL_PIXEL_FORMAT_YCbCr_420_888
2688 x 1512 HAL_PIXEL_FORMAT_BLOB
2592 x 1944 HAL_PIXEL_FORMAT_YCbCr_420_888
2592 x 1944 HAL_PIXEL_FORMAT_BLOB
2048 x 1536 HAL_PIXEL_FORMAT_YCbCr_420_888
2048 x 1536 HAL_PIXEL_FORMAT_BLOB
1920 x 1440 HAL_PIXEL_FORMAT_YCbCr_420_888
1920 x 1440 HAL_PIXEL_FORMAT_BLOB
1928 x 1208 HAL_PIXEL_FORMAT_YCbCr_420_888
1928 x 1208 HAL_PIXEL_FORMAT_BLOB
1920 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1920 x 1080 HAL_PIXEL_FORMAT_BLOB
1600 x 1200 HAL_PIXEL_FORMAT_YCbCr_420_888
1600 x 1200 HAL_PIXEL_FORMAT_BLOB
1440 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1440 x 1080 HAL_PIXEL_FORMAT_BLOB
1280 x 960 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 960 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1080 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1080 x 1080 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 1280 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 1280 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
4056 x 3040 HAL_PIXEL_FORMAT_RAW10
4056 x 3040 HAL_PIXEL_FORMAT_RAW12
4056 x 3040 HAL_PIXEL_FORMAT_RAW16
4056 x 3040 HAL_PIXEL_FORMAT_RAW_OPAQUE
3840 x 2160 HAL_PIXEL_FORMAT_RAW10
3840 x 2160 HAL_PIXEL_FORMAT_RAW12
3840 x 2160 HAL_PIXEL_FORMAT_RAW16
3840 x 2160 HAL_PIXEL_FORMAT_RAW_OPAQUE
1920 x 1080 HAL_PIXEL_FORMAT_RAW10
1920 x 1080 HAL_PIXEL_FORMAT_RAW12
1920 x 1080 HAL_PIXEL_FORMAT_RAW16
1920 x 1080 HAL_PIXEL_FORMAT_RAW_OPAQUE
ANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 100
max = 35200
ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
2200
ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 243753000ns
====================================
Stats for camera: 2
ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
240 x 1629
ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
240 x 1629 HAL_PIXEL_FORMAT_RAW10
240 x 1629 HAL_PIXEL_FORMAT_RAW12
240 x 1629 HAL_PIXEL_FORMAT_RAW16
240 x 1629 HAL_PIXEL_FORMAT_RAW_OPAQUE
ANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 0
ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
0
ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 0ns
====================================
Stats for camera: 3
ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
1280 x 800
1280 x 800
ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_RAW10
1280 x 800 HAL_PIXEL_FORMAT_RAW12
1280 x 800 HAL_PIXEL_FORMAT_RAW16
1280 x 800 HAL_PIXEL_FORMAT_RAW_OPAQUE
ANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 1596
ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
1596
ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 1318629735ns
====================================
Number of cameras detected: 4
Thanks,
George