@george-kollamkulam , i am assuming the drone is already set up with the correct camera config (you can also re-do it using voxl-configure-cameras and select 27. If your drone was incorrectly set up in C28 configuration, you would see the same error.
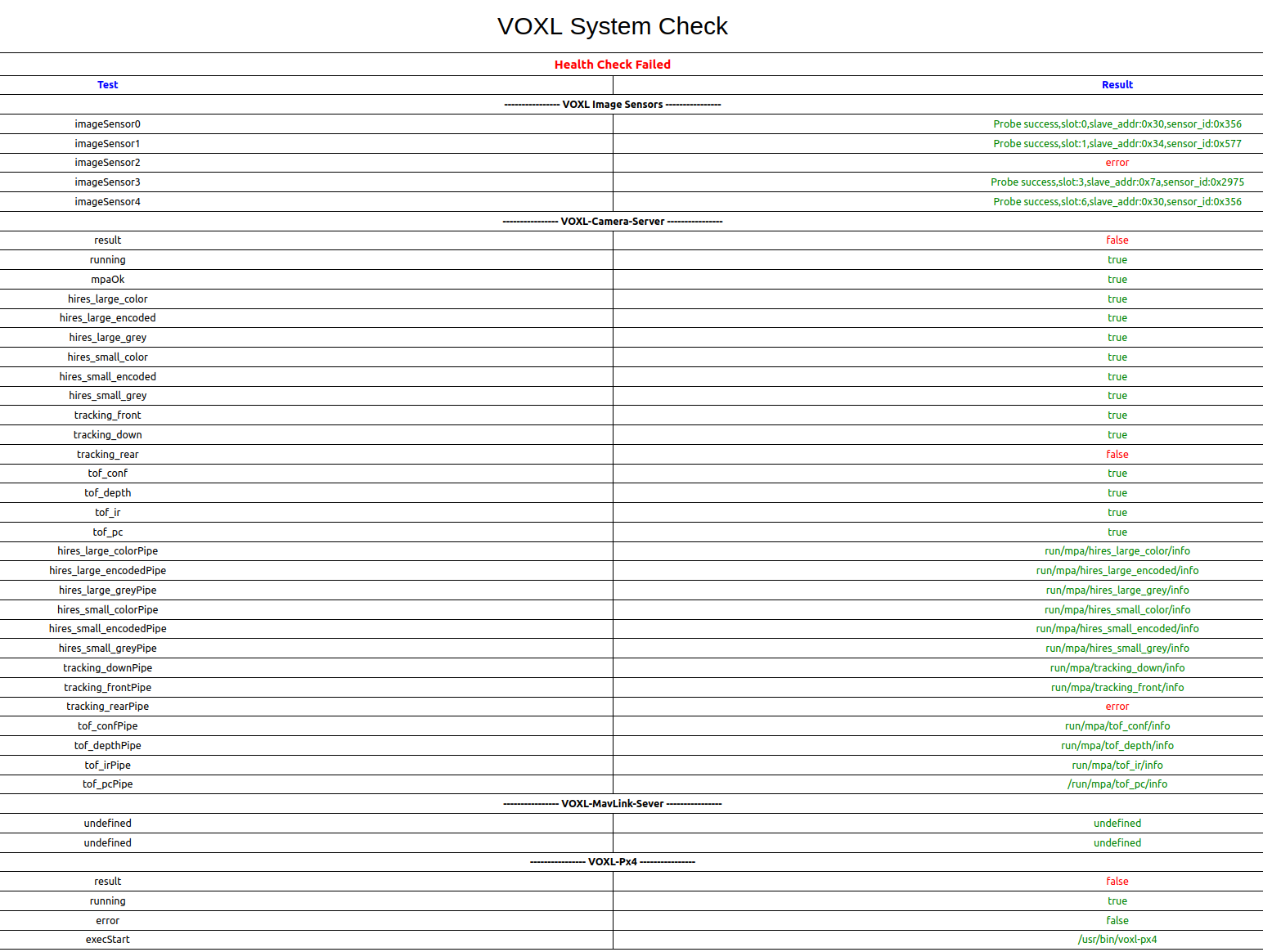
One way to check this before re-running voxl-configure-cameras is to list contents of /usr/lib/camera and see which sensormodule files are in there. For C27, you should see three AR0144 sensormodules (for slots 0, 2, 6), one IMX412 sensormodule for slot 1 and another one for the TOF in slot 3. From debug info when running voxl-camera-server -l, the three types of cameras have different sensor ID, as follows:
AR0144: 0x0356
IMX412: 0x0577
TOF : 0x2975
Assuming that step above will result in the same issue (AR0144 camera (sensor ID 0x0356) not detected in camera slot 2), then i think you need to inspect the M0173 board and specifically the connection of the camera in port J5 of M0173. Make sure the ucoax cable is plugged in properly, similarly like others. Unfortunately that will require some disassembly.
You could also double check first the ucoax connection at the camera itself if that is easier to access. If you have a spare AR0144 camera, you could try to disconnect the camera cable from the non-functioning camera and connect the spare AR0144 to see if the camera is the issue or the cable (or downstream connections).
Hopefully it is just a software mis-configuration, but please inspect the cables as suggested.
Alex