@Vinny Got it. Thanks!
george kollamkulam
@george kollamkulam
Posts
-
Microhard USB Dongle vs Microhard Add-on with USB Hub -
Microhard USB Dongle vs Microhard Add-on with USB HubHi,
Can someone please clarify the difference between the Microhard USB Dongle and the Microhard Add-on with USB Hub? Can I use either one of these to connect the Starling 2 UAV (with pMDDL 2450 modem) to the ground station? In the future, I would like to connect multiple UAVs to a single ground station over the Microhard mesh mode. Can this be achieved using either the USB dongle or the USB hub without any development effort?
Thanks,
George -
VOXL 2 Mini Compatibility - Starling 2, Microhard pMDDL 2450@Moderator got it. Thanks!
-
VOXL 2 Mini Compatibility - Starling 2, Microhard pMDDL 2450@Eric-Katzfey @Alex-Kushleyev @Moderator @modaltb could someone please clarify these questions?
Thanks,
George -
VOXL 2 Mini Compatibility - Starling 2, Microhard pMDDL 2450Hi,
-
Can I swap out the VOXL 2 autopilot for a VOXL 2 Mini on my Starling 2 UAV? Other than accelerometer calibration, and configuring the extrinsics, is there anything else that needs to be done to get it working with the C27 configuration? I would also need to integrate a FLIR 3.5 Lepton sensor in the future.
-
Is the VOXL 2 Mini compatible with the Microhard pMDDL 2450 modem? This carrier board seems to be for the pDDL modem. Is the same carrier board compatible with the pMDDL 2450 modem or is there another carrier board? Is there any software development effort to integrate the VOXL 2 Mini and the Microhard pMDDL 2450 modem? I wanted to use this modem to have multiple UAVs on the same RF network in a mesh architecture.
Thanks,
George -
-
Rear Tracking Camera Not Working@Alex-Kushleyev @Eric-Katzfey @modaltb could you help troubleshoot? The issue has been there from the start. Would the sensor need to be replaced, or is it just a software configuration change? The connections seem intact and no changes were made to the hardware except adding a Lepton 3.5 sensor.
Thanks,
George -
Rear Tracking Camera Not Working@Alex-Kushleyev I'm not sure if it came with this error, but I haven't observed this before and I don't recall any event that could have triggered this failure. The UAV has not yet flown, so it has not had any crashes or known failures. What other details would help identify the root cause?
Thanks,
George -
Rear Tracking Camera Not WorkingHi,
The rear tracking camera on my Starling 2 UAV is not working and doesn't show up on the voxl portal (screenshot attached below). How can we resolve this? Additionally, would this error have an effect on the QVIO blowup issue?
The Starling 2 is in C27 configuration. The output of “voxl-camera-server -l” is as follows:voxl2:~$ voxl-camera-server -l
existing instance of voxl-camera-server found, attempting to stop it
DEBUG: Attempting to open the hal module
DEBUG: SUCCESS: Camera module opened on attempt 0
DEBUG: ----------- Number of cameras: 4DEBUG: Cam idx: 0, Cam slot: 0, Slave Address: 0x0030, Sensor Id: 0x0356
DEBUG: Cam idx: 1, Cam slot: 1, Slave Address: 0x0034, Sensor Id: 0x0577
DEBUG: Cam idx: 2, Cam slot: 3, Slave Address: 0x007A, Sensor Id: 0x2975
DEBUG: Cam idx: 3, Cam slot: 6, Slave Address: 0x0030, Sensor Id: 0x0356
DEBUG: Note: This list comes from the HAL module and may not be indicative
DEBUG: of configurations that have full pipelinesDEBUG: Number of cameras: 4
====================================
Stats for camera: 0ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
1280 x 800
1280 x 800ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_RAW10
1280 x 800 HAL_PIXEL_FORMAT_RAW12
1280 x 800 HAL_PIXEL_FORMAT_RAW16
1280 x 800 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 1596ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
1596ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 1318629735ns====================================
Stats for camera: 1ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
4056 x 3040
3840 x 2160
1920 x 1080
1920 x 1080
1920 x 1080
1280 x 720
1280 x 720ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
4056 x 3040 HAL_PIXEL_FORMAT_YCbCr_420_888
4056 x 3040 HAL_PIXEL_FORMAT_BLOB
4000 x 3000 HAL_PIXEL_FORMAT_YCbCr_420_888
4000 x 3000 HAL_PIXEL_FORMAT_BLOB
3840 x 2160 HAL_PIXEL_FORMAT_YCbCr_420_888
3840 x 2160 HAL_PIXEL_FORMAT_BLOB
3264 x 2448 HAL_PIXEL_FORMAT_YCbCr_420_888
3264 x 2448 HAL_PIXEL_FORMAT_BLOB
3200 x 2400 HAL_PIXEL_FORMAT_YCbCr_420_888
3200 x 2400 HAL_PIXEL_FORMAT_BLOB
2976 x 2976 HAL_PIXEL_FORMAT_YCbCr_420_888
2976 x 2976 HAL_PIXEL_FORMAT_BLOB
2688 x 1512 HAL_PIXEL_FORMAT_YCbCr_420_888
2688 x 1512 HAL_PIXEL_FORMAT_BLOB
2592 x 1944 HAL_PIXEL_FORMAT_YCbCr_420_888
2592 x 1944 HAL_PIXEL_FORMAT_BLOB
2048 x 1536 HAL_PIXEL_FORMAT_YCbCr_420_888
2048 x 1536 HAL_PIXEL_FORMAT_BLOB
1920 x 1440 HAL_PIXEL_FORMAT_YCbCr_420_888
1920 x 1440 HAL_PIXEL_FORMAT_BLOB
1928 x 1208 HAL_PIXEL_FORMAT_YCbCr_420_888
1928 x 1208 HAL_PIXEL_FORMAT_BLOB
1920 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1920 x 1080 HAL_PIXEL_FORMAT_BLOB
1600 x 1200 HAL_PIXEL_FORMAT_YCbCr_420_888
1600 x 1200 HAL_PIXEL_FORMAT_BLOB
1440 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1440 x 1080 HAL_PIXEL_FORMAT_BLOB
1280 x 960 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 960 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1080 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1080 x 1080 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 1280 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 1280 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
4056 x 3040 HAL_PIXEL_FORMAT_RAW10
4056 x 3040 HAL_PIXEL_FORMAT_RAW12
4056 x 3040 HAL_PIXEL_FORMAT_RAW16
4056 x 3040 HAL_PIXEL_FORMAT_RAW_OPAQUE
3840 x 2160 HAL_PIXEL_FORMAT_RAW10
3840 x 2160 HAL_PIXEL_FORMAT_RAW12
3840 x 2160 HAL_PIXEL_FORMAT_RAW16
3840 x 2160 HAL_PIXEL_FORMAT_RAW_OPAQUE
1920 x 1080 HAL_PIXEL_FORMAT_RAW10
1920 x 1080 HAL_PIXEL_FORMAT_RAW12
1920 x 1080 HAL_PIXEL_FORMAT_RAW16
1920 x 1080 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 100
max = 35200ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
2200ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 243753000ns====================================
Stats for camera: 2ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
240 x 1629ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
240 x 1629 HAL_PIXEL_FORMAT_RAW10
240 x 1629 HAL_PIXEL_FORMAT_RAW12
240 x 1629 HAL_PIXEL_FORMAT_RAW16
240 x 1629 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 0ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
0ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 0ns====================================
Stats for camera: 3ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
1280 x 800
1280 x 800ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_RAW10
1280 x 800 HAL_PIXEL_FORMAT_RAW12
1280 x 800 HAL_PIXEL_FORMAT_RAW16
1280 x 800 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 1596ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
1596ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 1318629735ns====================================
Number of cameras detected: 4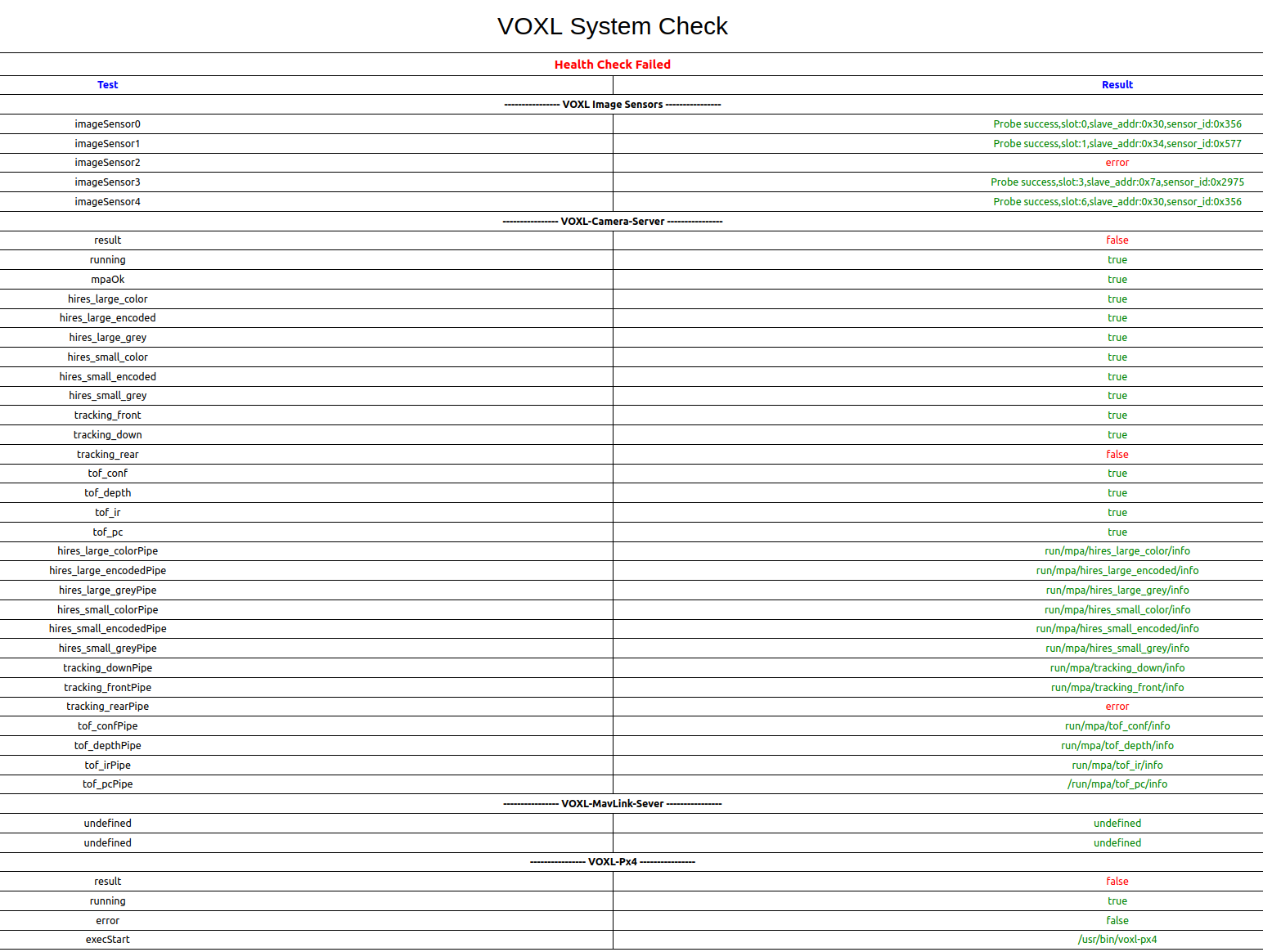
Thanks,
George -
Teledyne FLIR Lepton 3.5 Integration@Alex-Kushleyev would you be able to help troubleshoot this error with the rear tracking camera?
-
Teledyne FLIR Lepton 3.5 Integration@Alex-Kushleyev here's the system response.
voxl2:/$ cd /home/root
voxl2:~$ dpkg -i libmodal-journal_0.2.6-202505081055_arm64.deb
(Reading database ... 137565 files and directories currently installed.)
Preparing to unpack libmodal-journal_0.2.6-202505081055_arm64.deb ...
Unpacking libmodal-journal (0.2.6-202505081055) over (0.2.5) ...
Setting up libmodal-journal (0.2.6-202505081055) ...
Processing triggers for libc-bin (2.27-3ubuntu1.6) ...
voxl2:~$ dpkg -l | grep libmodal-journal
ii libmodal-journal 0.2.6-202505081055 arm64 Journaling library
voxl2:~$ voxl-camera-server -l
existing instance of voxl-camera-server found, attempting to stop it
DEBUG: Attempting to open the hal module
DEBUG: SUCCESS: Camera module opened on attempt 0
DEBUG: ----------- Number of cameras: 4DEBUG: Cam idx: 0, Cam slot: 0, Slave Address: 0x0030, Sensor Id: 0x0356
DEBUG: Cam idx: 1, Cam slot: 1, Slave Address: 0x0034, Sensor Id: 0x0577
DEBUG: Cam idx: 2, Cam slot: 3, Slave Address: 0x007A, Sensor Id: 0x2975
DEBUG: Cam idx: 3, Cam slot: 6, Slave Address: 0x0030, Sensor Id: 0x0356
DEBUG: Note: This list comes from the HAL module and may not be indicative
DEBUG: of configurations that have full pipelinesDEBUG: Number of cameras: 4
====================================
Stats for camera: 0ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
1280 x 800
1280 x 800ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_RAW10
1280 x 800 HAL_PIXEL_FORMAT_RAW12
1280 x 800 HAL_PIXEL_FORMAT_RAW16
1280 x 800 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 1596ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
1596ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 1318629735ns====================================
Stats for camera: 1ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
4056 x 3040
3840 x 2160
1920 x 1080
1920 x 1080
1920 x 1080
1280 x 720
1280 x 720ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
4056 x 3040 HAL_PIXEL_FORMAT_YCbCr_420_888
4056 x 3040 HAL_PIXEL_FORMAT_BLOB
4000 x 3000 HAL_PIXEL_FORMAT_YCbCr_420_888
4000 x 3000 HAL_PIXEL_FORMAT_BLOB
3840 x 2160 HAL_PIXEL_FORMAT_YCbCr_420_888
3840 x 2160 HAL_PIXEL_FORMAT_BLOB
3264 x 2448 HAL_PIXEL_FORMAT_YCbCr_420_888
3264 x 2448 HAL_PIXEL_FORMAT_BLOB
3200 x 2400 HAL_PIXEL_FORMAT_YCbCr_420_888
3200 x 2400 HAL_PIXEL_FORMAT_BLOB
2976 x 2976 HAL_PIXEL_FORMAT_YCbCr_420_888
2976 x 2976 HAL_PIXEL_FORMAT_BLOB
2688 x 1512 HAL_PIXEL_FORMAT_YCbCr_420_888
2688 x 1512 HAL_PIXEL_FORMAT_BLOB
2592 x 1944 HAL_PIXEL_FORMAT_YCbCr_420_888
2592 x 1944 HAL_PIXEL_FORMAT_BLOB
2048 x 1536 HAL_PIXEL_FORMAT_YCbCr_420_888
2048 x 1536 HAL_PIXEL_FORMAT_BLOB
1920 x 1440 HAL_PIXEL_FORMAT_YCbCr_420_888
1920 x 1440 HAL_PIXEL_FORMAT_BLOB
1928 x 1208 HAL_PIXEL_FORMAT_YCbCr_420_888
1928 x 1208 HAL_PIXEL_FORMAT_BLOB
1920 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1920 x 1080 HAL_PIXEL_FORMAT_BLOB
1600 x 1200 HAL_PIXEL_FORMAT_YCbCr_420_888
1600 x 1200 HAL_PIXEL_FORMAT_BLOB
1440 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1440 x 1080 HAL_PIXEL_FORMAT_BLOB
1280 x 960 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 960 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1080 x 1080 HAL_PIXEL_FORMAT_YCbCr_420_888
1080 x 1080 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 1280 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 1280 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
4056 x 3040 HAL_PIXEL_FORMAT_RAW10
4056 x 3040 HAL_PIXEL_FORMAT_RAW12
4056 x 3040 HAL_PIXEL_FORMAT_RAW16
4056 x 3040 HAL_PIXEL_FORMAT_RAW_OPAQUE
3840 x 2160 HAL_PIXEL_FORMAT_RAW10
3840 x 2160 HAL_PIXEL_FORMAT_RAW12
3840 x 2160 HAL_PIXEL_FORMAT_RAW16
3840 x 2160 HAL_PIXEL_FORMAT_RAW_OPAQUE
1920 x 1080 HAL_PIXEL_FORMAT_RAW10
1920 x 1080 HAL_PIXEL_FORMAT_RAW12
1920 x 1080 HAL_PIXEL_FORMAT_RAW16
1920 x 1080 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 100
max = 35200ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
2200ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 243753000ns====================================
Stats for camera: 2ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
240 x 1629ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
240 x 1629 HAL_PIXEL_FORMAT_RAW10
240 x 1629 HAL_PIXEL_FORMAT_RAW12
240 x 1629 HAL_PIXEL_FORMAT_RAW16
240 x 1629 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 0ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
0ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 0ns====================================
Stats for camera: 3ANDROID_SCALER_AVAILABLE_RAW_SIZES:
These are likely supported by the sensor
1280 x 800
1280 x 800ANDROID_SCALER_AVAILABLE_STREAM_CONFIGURATIONS:
These are NOT necessarily supported by the sensor
1280 x 800 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 800 HAL_PIXEL_FORMAT_BLOB
1280 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 768 HAL_PIXEL_FORMAT_BLOB
1280 x 720 HAL_PIXEL_FORMAT_YCbCr_420_888
1280 x 720 HAL_PIXEL_FORMAT_BLOB
1024 x 738 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 738 HAL_PIXEL_FORMAT_BLOB
1024 x 768 HAL_PIXEL_FORMAT_YCbCr_420_888
1024 x 768 HAL_PIXEL_FORMAT_BLOB
864 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
864 x 480 HAL_PIXEL_FORMAT_BLOB
800 x 600 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 600 HAL_PIXEL_FORMAT_BLOB
800 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
800 x 480 HAL_PIXEL_FORMAT_BLOB
720 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
720 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 512 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 512 HAL_PIXEL_FORMAT_BLOB
640 x 480 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 480 HAL_PIXEL_FORMAT_BLOB
640 x 400 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 400 HAL_PIXEL_FORMAT_BLOB
640 x 360 HAL_PIXEL_FORMAT_YCbCr_420_888
640 x 360 HAL_PIXEL_FORMAT_BLOB
352 x 288 HAL_PIXEL_FORMAT_YCbCr_420_888
352 x 288 HAL_PIXEL_FORMAT_BLOB
320 x 240 HAL_PIXEL_FORMAT_YCbCr_420_888
320 x 240 HAL_PIXEL_FORMAT_BLOB
240 x 320 HAL_PIXEL_FORMAT_YCbCr_420_888
240 x 320 HAL_PIXEL_FORMAT_BLOB
176 x 144 HAL_PIXEL_FORMAT_YCbCr_420_888
176 x 144 HAL_PIXEL_FORMAT_BLOB
1280 x 800 HAL_PIXEL_FORMAT_RAW10
1280 x 800 HAL_PIXEL_FORMAT_RAW12
1280 x 800 HAL_PIXEL_FORMAT_RAW16
1280 x 800 HAL_PIXEL_FORMAT_RAW_OPAQUEANDROID_SENSOR_INFO_SENSITIVITY_RANGE
min = 54
max = 1596ANDROID_SENSOR_MAX_ANALOG_SENSITIVITY
1596ANDROID_SENSOR_INFO_EXPOSURE_TIME_RANGE
min = 0ns
max = 1318629735ns====================================
Number of cameras detected: 4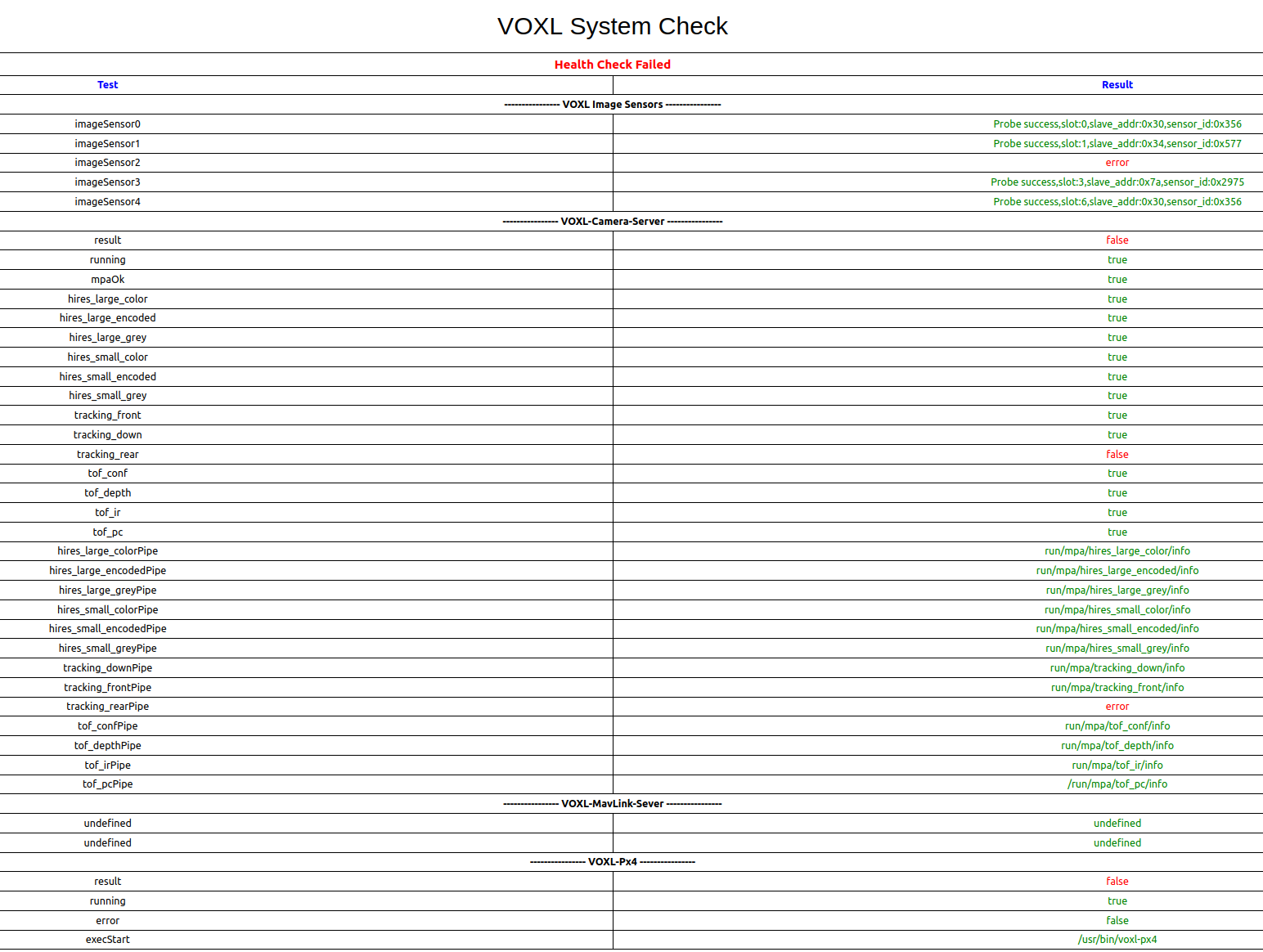
-
Incorrect battery0 voltage on QGC@constantines @Eric-Katzfey @Alex-Kushleyev voxl-esc is reporting the correct voltage. It looks like changing the QGC version has fixed the issue.
Thanks for your inputs.
George -
Incorrect battery0 voltage on QGC@Alex-Kushleyev Sorry for the delay.
The voltage value seems to have decreased a little with time, but I don't think this is following the battery discharge trend. I started at 270.31 V just before take-off, and I was at 269.24 V after roughly 15 mins of flying. What could be the next steps to troubleshooting this issue?
Thanks,
George -
Starling 2 SLAM ROS2 Foxy@teddy-zaremba
-
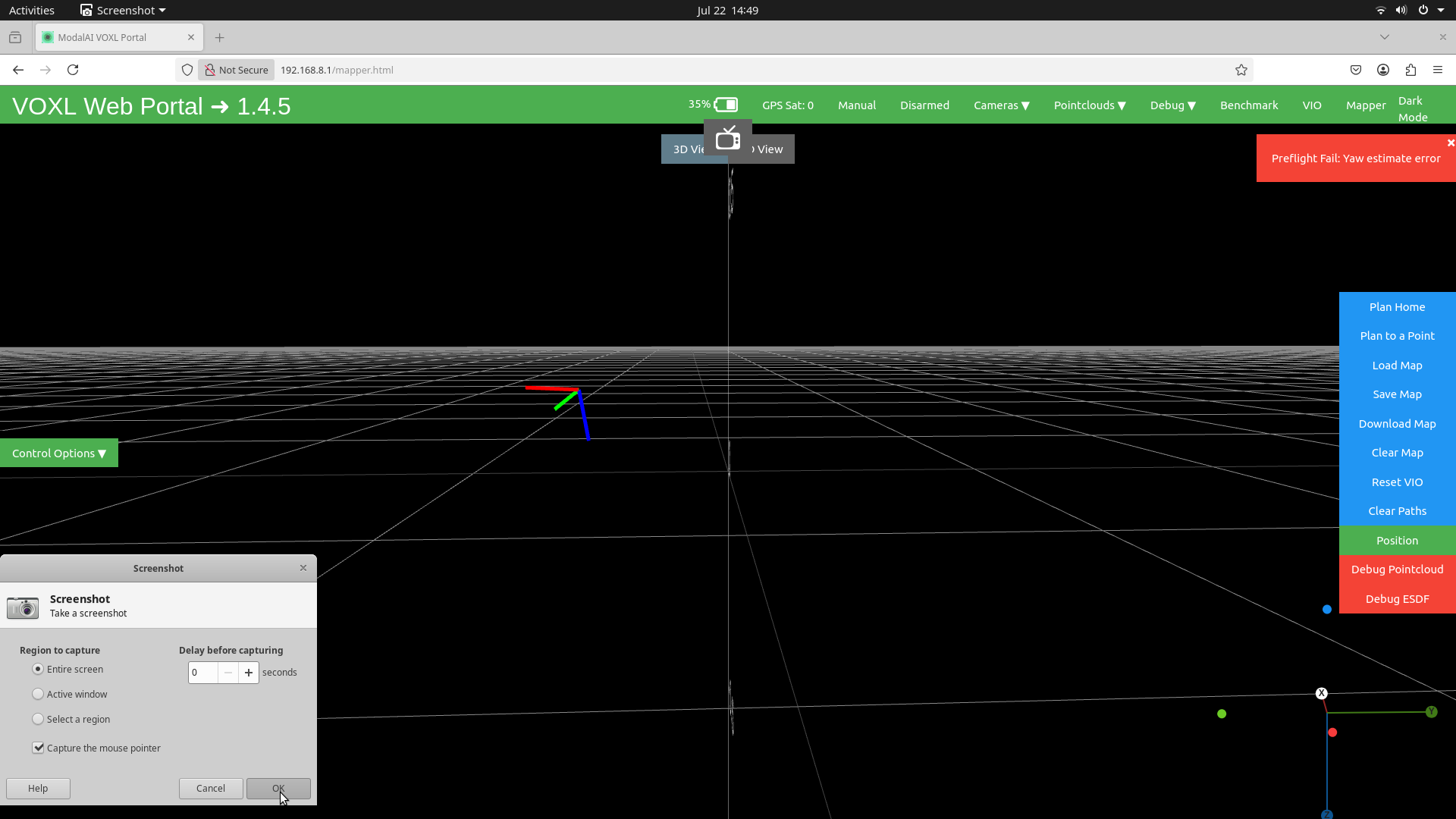
Screenshots are attached below. On the voxl portal, I'm able to see the tracking_down and tracking_front feeds, but I don't see the tracking_rear option (my Starling2 is in C27 config: 1 hires camera, 1 tof sensor, 3 tracking cameras). I haven't changed anything related to the default camera setup, except adding a Lepton 3.5 sensor. I was hoping to use the voxl-qvio-server, but I'm happy to explore openvins if that's more feasible. I don't see a red box, but I'm able to see the axes on the voxl mapper page, and its moving when I move the UAV.

-
How can I access the voxl_mapper_aligned_ptcloud?
Thanks,
George -
-
Starling 2 SLAM ROS2 Foxy@teddy-zaremba thanks for your response.
-
By default, are the stereo cameras being used? Or is it the tof sensor?
-
To clarify, if we try to visualize voa_pc_out on rviz2, I would not be able to see the UAV movement. I would need to use a topic that already fuses imu_apps data with tof_pc data or create such a custom topic. Is my understanding correct?
-
I'd be happy to try it. I've opened the voxl mapper page on the voxl portal and voxl-dfs-server is enabled, but I'm unable to start it with systemctl start voxl-dfs-server. I'm also unable to see /voxl_mapper_aligned_ptcloud under ros2 topic list (I don't think it's being published). How can we address these?
-
What's the best way to get the created map from voxl mapper as a ROS2 foxy interface?
Thanks,
George -
-
Starling 2 - failure when entering offboard mode in Starling 2@Hector-Gutierrez thanks for the suggestion. However, I have now seen this unstable behavior in all modes (manual, altitude, position and offboard), both indoor and outdoors. I suspect that qvio is failing and trying to reset mid flight (Error: Not stationary was observed multiple times on the qvio_overlay page on VOXL portal). I don't think the GPS is even being used (QGC reports 100 HDOP and 0 satellites). The only mode where the UAV is controllable is Manual, but the qvio error is still present.
@Alex-Kushleyev would you be able to share some insight into what could be happening? How can we resolve this issue?
Thanks,
George -
Starling 2 SLAM ROS2 FoxyHello,
I wanted to use ROS2 Foxy to run SLAM and create a map of an indoor environment on RViz2. Initially, I tried using /tof_pc to get point cloud data, but it seems this topic doesn’t account for the UAV’s position and orientation (Starling 2). As a result, the point cloud data kept appending to itself incorrectly, and I couldn’t generate a usable map.
Could you clarify:
- What sensors are fused or used in /voa_pc_out?
- Does /voa_pc_out compensate for UAV movement, and is this topic alone sufficient for mapping an area?
- What topic combinations would you recommend for:
i) LiDAR SLAM
ii) Visual SLAM
For example:
a) imu_apps + tof_pc
b) voa_pc_out
c) tracking cameras + imu_apps
d) any other combinationThanks,
George -
ROS2 Foxy Setup Issues@Aaron-Porter thanks for checking in. I'm able to see all the camera related ros2 topics now on the UAV and the laptop terminals.
Cheers,
George -
Teledyne FLIR Lepton 3.5 Integration@Alex-Kushleyev apart from the lepton sensor, I have 5 (1 hires, 1 tof and 3 tracking).
Can you please point me to the resource that explains how to update the libmodal-journal package? Would I need to reinstall ROS2 Foxy or anything else?
Thanks,
George -
Teledyne FLIR Lepton 3.5 Integration@Alex-Kushleyev
existing instance of voxl-camera-server found, attempting to stop it
Number of cameras detected: 4On the voxl portal system check, it returned false for tracking_rear (VOXL-Camera-Server) and error for imageSensor2 (VOXL Image Sensors).
 -
Teledyne FLIR Lepton 3.5 Integration@Alex-Kushleyev I did a power cycle on the lepton sensor and it seems to be working now (click sound and feed available). All cameras except the rear tracking camera seems to be working fine (screenshot attached below). It doesn't show up on the voxl portal. How can we resolve this?