@Judoor-0
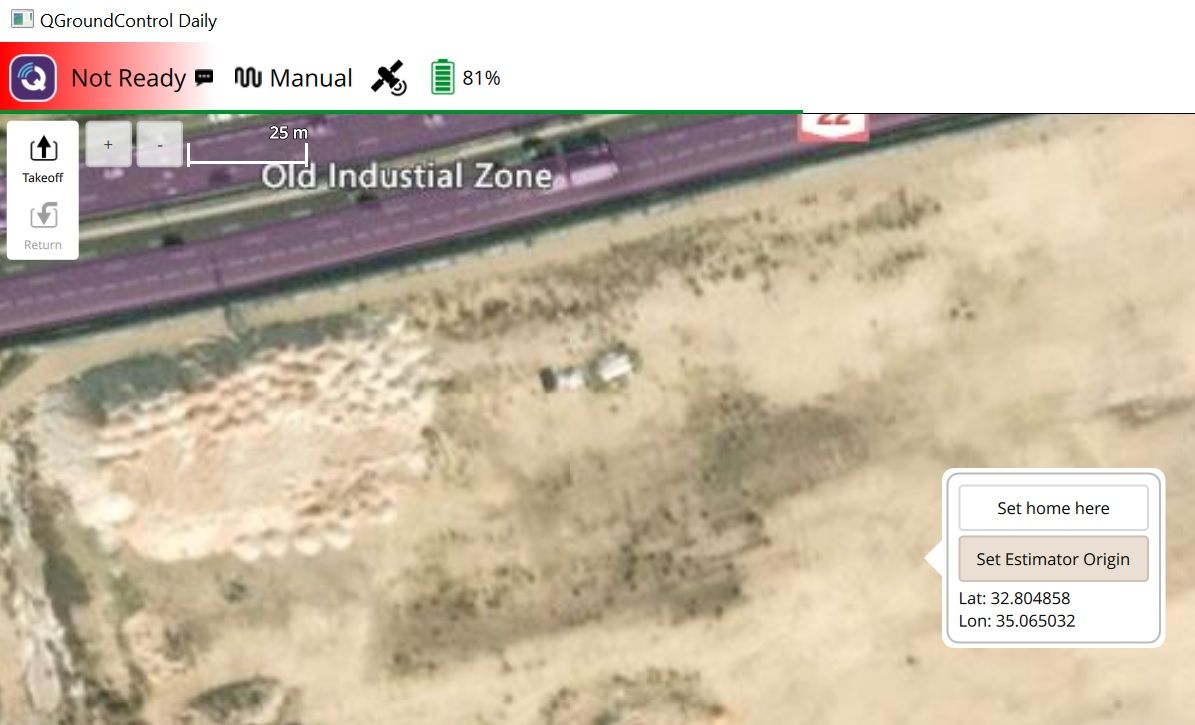
You can use QGroundControl v5 and later. Then once your drone coots and connected to the QGC, mouse click on the desirable position and select Set Estimator Origin option. This will be your [0,0,0] in local frame and [lat, lon, alt] in global
C
Best posts made by constantines
-
RE: VIO waypoint navigationposted in VOXL SDK
Latest posts made by constantines
-
RE: Drone Flipping on Take offposted in VOXL Flight Deck
- Check your motor order
- Check motor rotation direction
- What is your voxl orientation?
-
RE: Incorrect battery0 voltage on QGCposted in Ask your questions right here!
@george-kollamkulam @Eric-Katzfey @Alex-Kushleyev
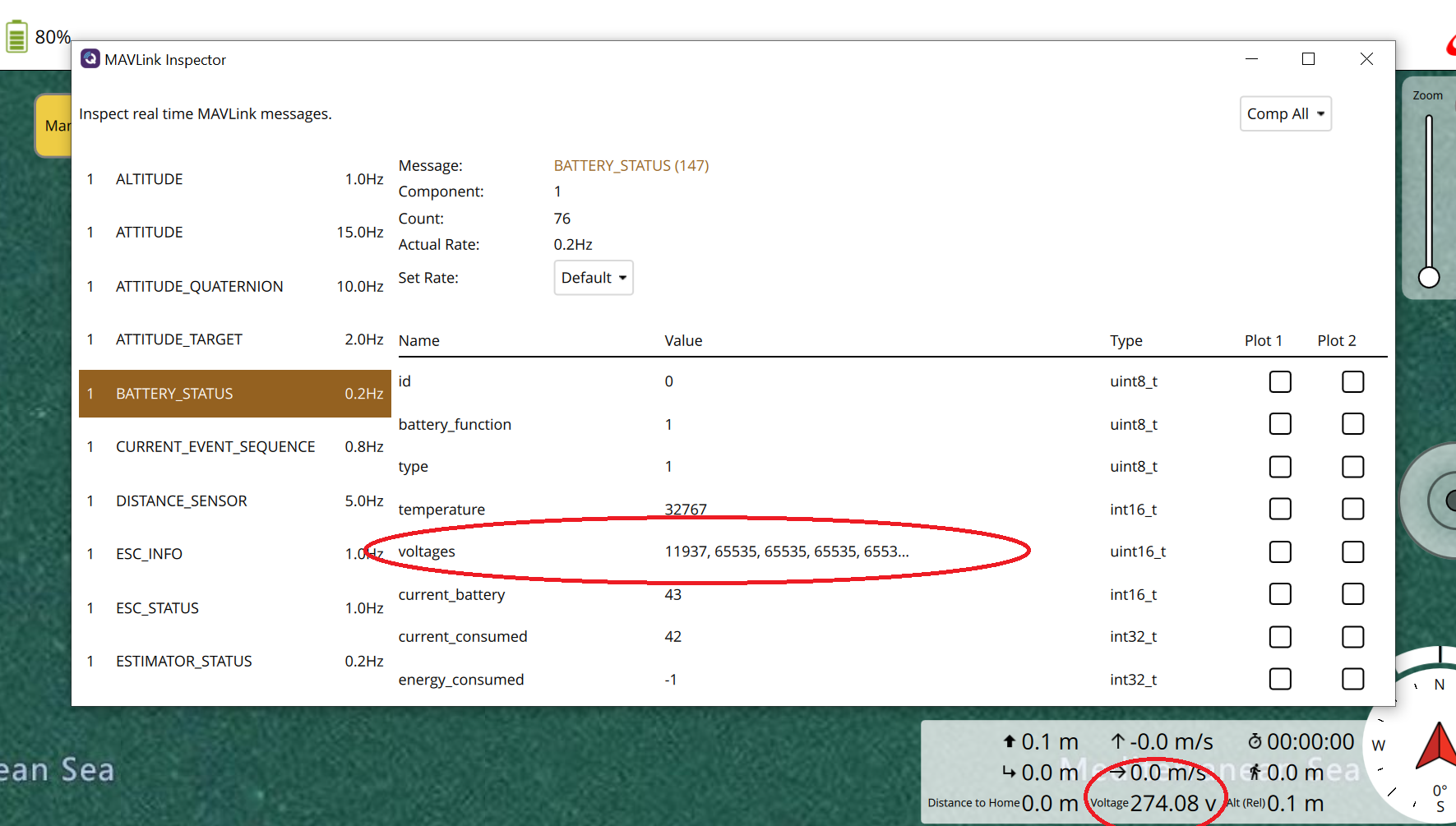
According to this the Modalai PX4 uses the voltages_ext field of the BATTERY_STATUS message incorrectly. That fields does not use UINT16_MAX (65535) to indicate no value. It should use 0, otherwise they are added to the battery voltage

-
RE: RC transmitter / receiverposted in Ask your questions right here!
@VictorG
Sorry, the previous post wasn't clear
The flight core 2 is capable to receive SBUS or DSMX protocols. So if your FlySky receiver is capable to output SBUS than you can use it -
RE: Incorrect battery0 voltage on QGCposted in Ask your questions right here!
@george-kollamkulam @Alex-Kushleyev @Eric-Katzfey
Can confirm the same.
But it happens only with QGC version 5 and later. With previous versions of QGC everything works as it should. I opened an issue at QGC github. This is definetely not a VOXL or Modalai problemThis is how it looks with QGC v5.0.6
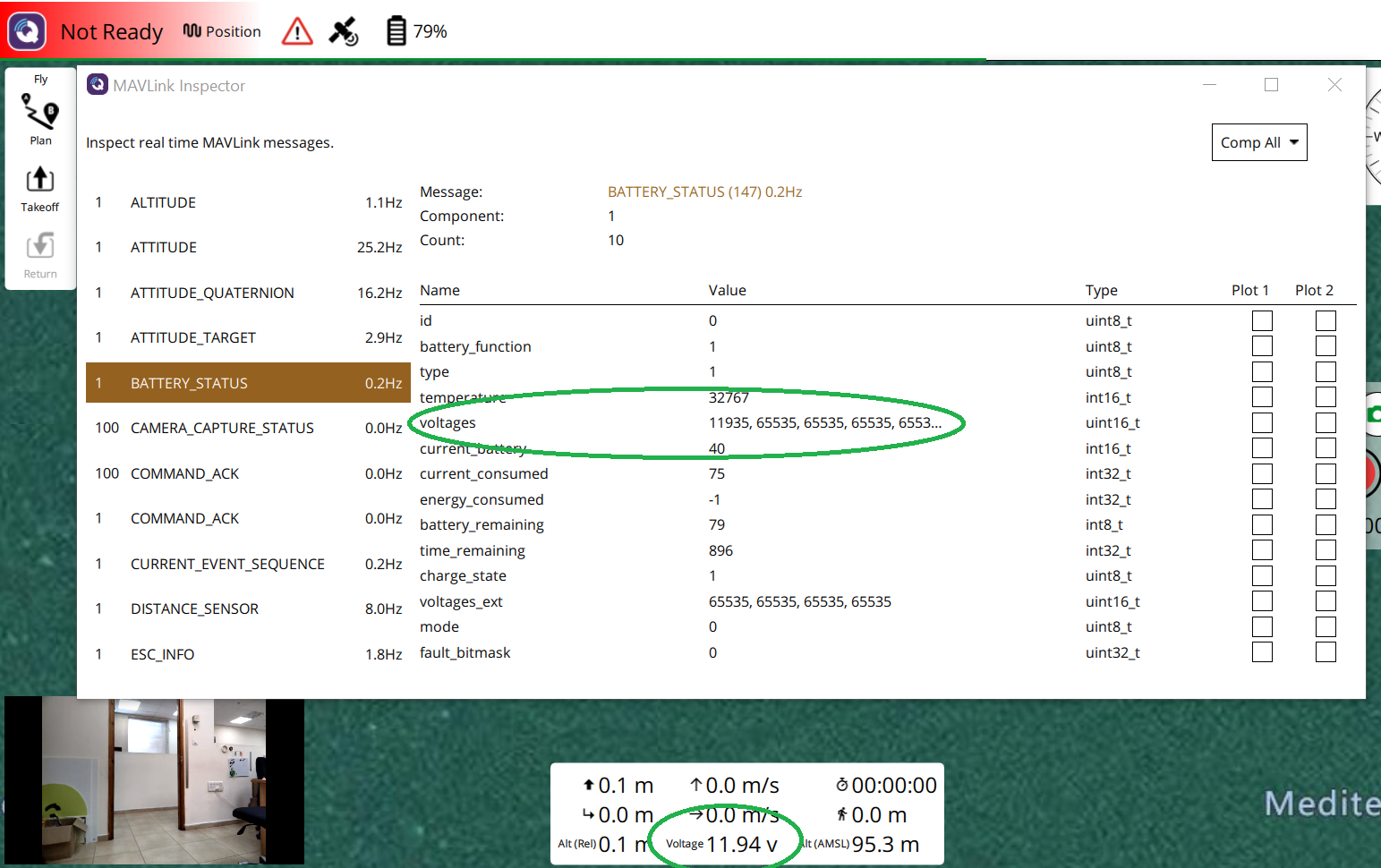
And this is the same system but with QGC v4.4.4
-
RE: RC transmitter / receiverposted in Ask your questions right here!
@VictorG
According to Flight Core v2 RC Options your FlySky receiver should output SBUS, than you can use it -
RE: UART communication using J19 - VOXL2 SENTINELposted in Ask your questions right here!
@Alex-Kushleyev
Hi, and what if I want to add a Mavlink sensor (say a number of distance sensors connected to a dedicated MCU) to the VOXL2 using the J19 (PINS: #2-TX, #3-RX, #6-GND) instead of the GPS? I plan to read it using PX4. It that possible? -
RE: I can't see OBSTACLE_DISTANCE on QGCposted in Support Request Format for Best Results
@Inverse-AJ @rogerli
Hi, I also struggled with the OBSTACLE_DISTANCE MAVLink message not appearing in the MAVLink Inspector. Moreover, obstacle avoidance was not functioning after I upgraded v1.3.5 to ModalAI SDK v1.5.0. If you're experiencing this issue, ensure the following:Set MPC_POS_MODE to 0 (Simple Position Control) or 3 (Smooth Position Control). The default value (4, Acceleration-based Input) is incompatible with ModalAI’s VOXL platform.
Set COM_OBS_AVOID to 1. This enables obstacle avoidance in PX4.
Set CP_DIST to a value greater than 0. This specifies the critical distance for collision prevention.
Ensure your drone has a valid home position or local position from QVIO. This is required for proper navigation.
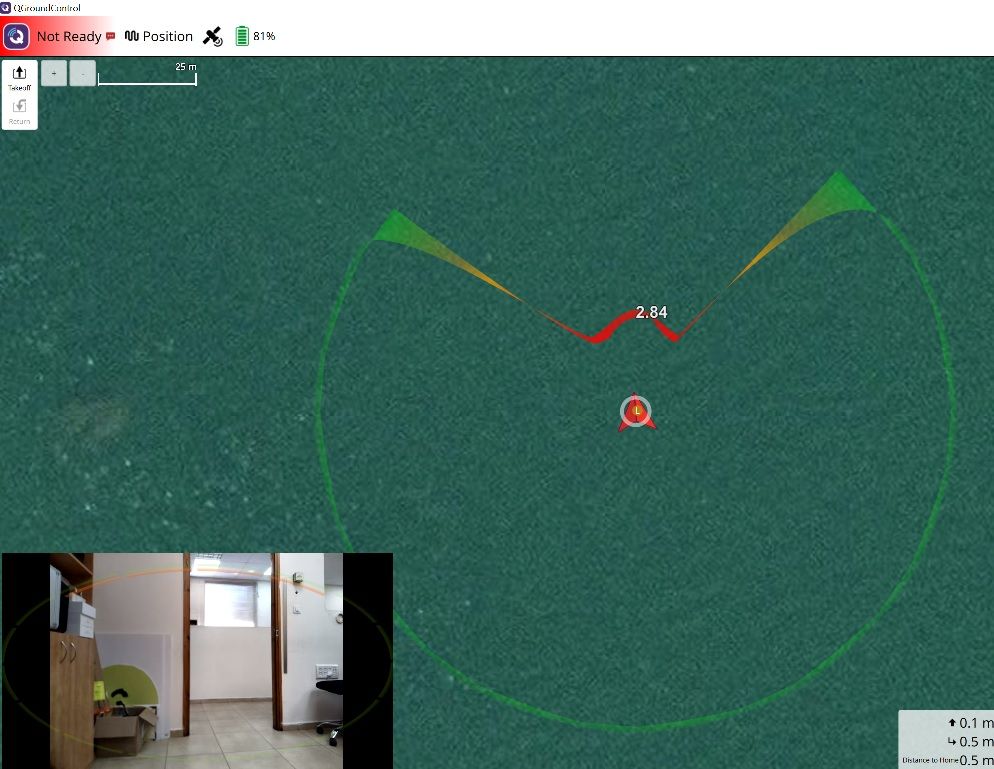
Ensure your drone is in Position Hold mode. Obstacle avoidance requires this flight mode.Although the OBSTACLE_DISTANCE message does not appear in the MAVLink Inspector, QGroundControl displays the obstacle distance overlay in its telemetry view, and the drone successfully performs obstacle avoidance. Note: This applies to ModalAI SDK v1.5.0; check for updates in newer versions.
-
RE: VIO waypoint navigationposted in VOXL SDK
@Judoor-0
You can use QGroundControl v5 and later. Then once your drone coots and connected to the QGC, mouse click on the desirable position and select Set Estimator Origin option. This will be your [0,0,0] in local frame and [lat, lon, alt] in global
-
RE: Fact Checking my Understanding of the Extrinsic Configurationposted in Ask your questions right here!
Updated the SDK to v1.5.0 the problem is still here ¯\(ツ)/¯
-
RE: Fact Checking my Understanding of the Extrinsic Configurationposted in Ask your questions right here!
@Alex-Kushleyev @Cliff-Wong
Subject: QVIO Trajectory Visualization Issue with 180-Degree Roll Rotation on VOXL2Hi,
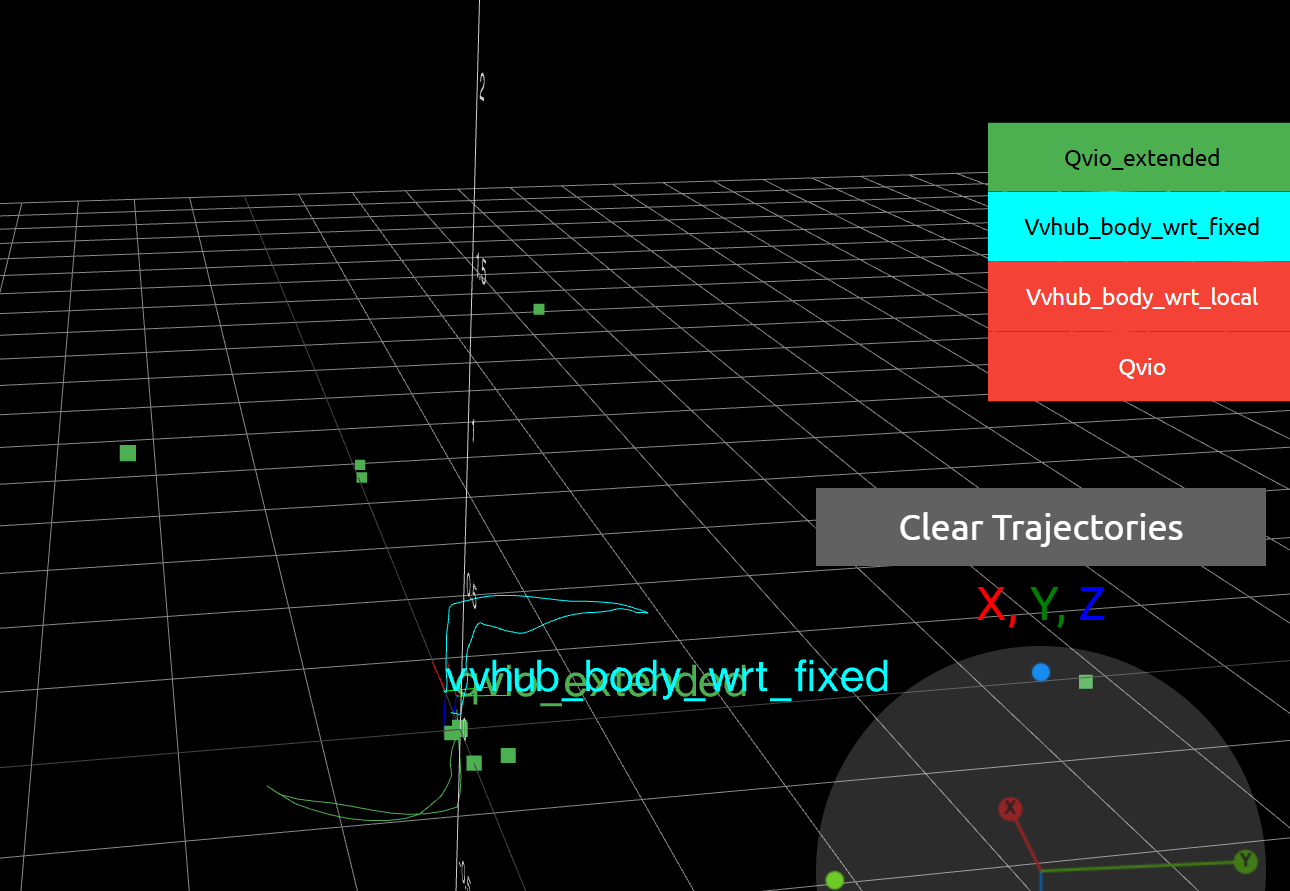
I'm encountering an issue with QVIO on a VOXL2 setup where the board is rotated 180 degrees around the roll axis. The drone flies well, and the VIO performance is acceptable, but the QVIO trajectory visualization (qvio and Vvhub_body_wrt) does not align with the actual drone movement.Problem Description:
I moved the drone up and to the right, then returned it to its starting position. However, the QVIO visualization shows the movement rotated 180 degrees about the X-axis compared to the actual motion. Please see the attached image for reference:
Extrinsics Configuration:
Here is my current extrinsics configuration:"extrinsics": [{ "parent": "imu_apps", "child": "tracking", "T_child_wrt_parent": [0.05, 0.0067, -0.03], "RPY_parent_to_child": [0, 135, -90] }, { "parent": "body", "child": "imu_apps", "T_child_wrt_parent": [0.025, 0.0067, -0.000360], "RPY_parent_to_child": [180, 0, 0] }, { "parent": "body", "child": "stereo_front_l", "T_child_wrt_parent": [0.0793, -0.040, -0.0243], "RPY_parent_to_child": [0, 90, 90] }, { "parent": "body", "child": "stereo_rear_l", "T_child_wrt_parent": [-0.0297, 0.04, 0.0415], "RPY_parent_to_child": [0, -90, -90] }, { "parent": "body", "child": "tof", "T_child_wrt_parent": [0.078, 0, -0.025], "RPY_parent_to_child": [0, 90, 90] }, { "parent": "body", "child": "ground", "T_child_wrt_parent": [0, 0, 0.058], "RPY_parent_to_child": [0, 0, 0] }]Additional Notes:
I tested an alternative RPY_parent_to_child for the imu_apps to tracking transformation, changing [0, 135, -90] to [180, 45, 90]. Both configurations produce the same results, suggesting they may be equivalent.
The issue persists despite the correct flight behavior, indicating a possible mismatch in the coordinate frame or visualization pipeline.
My version is:-------------------------------------------------------------------------------- system-image: 1.7.10-M0054-14.1a-perf kernel: #1 SMP PREEMPT Fri Sep 27 21:18:59 UTC 2024 4.19.125 -------------------------------------------------------------------------------- hw platform: M0054 mach.var: 1.0.0 -------------------------------------------------------------------------------- voxl-suite: 1.3.5 -------------------------------------------------------------------------------- ... voxl-portal 0.7.0 voxl-qvio-server 1.0.4 voxl-streamer 0.7.4 voxl-suite 1.3.5 voxl-vision-hub 1.8.9 voxl2-system-image 1.7.10-r0Questions:
Could the 180-degree roll rotation of the VOXL2 be causing this visualization discrepancy?
Are there specific calibration steps or configuration adjustments for QVIO to account for this rotation?
Any suggestions for debugging the QVIO trajectory visualization?
Any insights or recommendations would be greatly appreciated. Thank you!