@Judoor-0
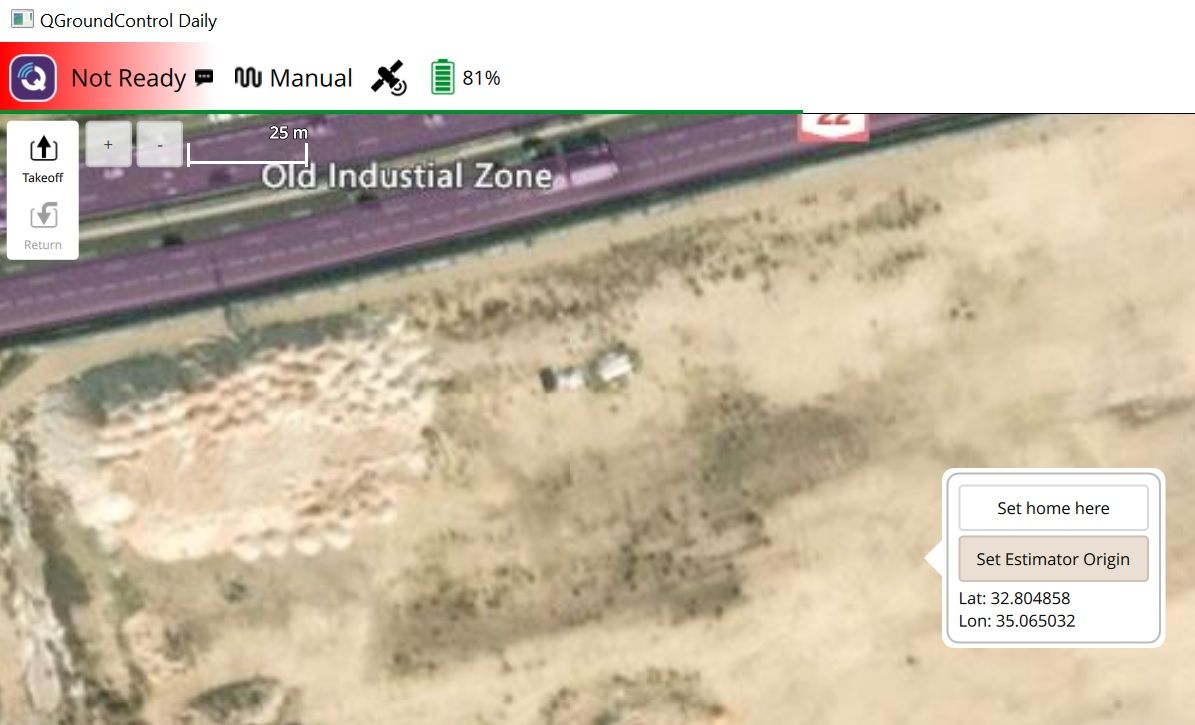
You can use QGroundControl v5 and later. Then once your drone coots and connected to the QGC, mouse click on the desirable position and select Set Estimator Origin option. This will be your [0,0,0] in local frame and [lat, lon, alt] in global
C
constantines
@constantines
Posts
-
VIO waypoint navigation