Hi @Alex-Kushleyev, sorry for the late reaction, it took some time before i could update to the new SDK (1.6). the system now works normally with the resolution 2704x1540, and downscaled to 1920x1080 for the MISP pipeline. Thanks for the help!
M
mark
@mark
Posts
-
IMX664 MISP decoding issue -
IMX664 MISP decoding issuehi @Alex-Kushleyev thanks for the feedback, but it seems like the resolution of 2704x1540 is not supported according to the camera. Selecting the biggest supported resolution from this list (2688x1520) this issue still occurs. The regular preview does seem to work on the resolution 2688x1512, but this format is not supported anymore when i turn on the "en_raw_preview" setting.
DEBUG: Checking Gain limits for Camera: hires2 DEBUG: Using gain limits min: 54 max: 8000 DEBUG: cam ID 1 checking for fmt: 37 w: 2704 h: 1540 o: 0 DEBUG: ==> option 0: format= 34 width=2688 height=1512 is_input=0 DEBUG: ==> option 4: format= 34 width=2688 height=1512 is_input=1 DEBUG: ==> option 8: format= 35 width=2688 height=1512 is_input=0 DEBUG: ==> option 12: format= 35 width=2688 height=1512 is_input=1 DEBUG: ==> option 16: format= 33 width=2688 height=1512 is_input=0 DEBUG: ==> option 20: format= 34 width=1920 height=1440 is_input=0 DEBUG: ==> option 24: format= 34 width=1920 height=1440 is_input=1 DEBUG: ==> option 28: format= 35 width=1920 height=1440 is_input=0 DEBUG: ==> option 32: format= 35 width=1920 height=1440 is_input=1 DEBUG: ==> option 36: format= 33 width=1920 height=1440 is_input=0 DEBUG: ==> option 40: format= 34 width=1928 height=1208 is_input=0 DEBUG: ==> option 44: format= 34 width=1928 height=1208 is_input=1 DEBUG: ==> option 48: format= 35 width=1928 height=1208 is_input=0 DEBUG: ==> option 52: format= 35 width=1928 height=1208 is_input=1 DEBUG: ==> option 56: format= 33 width=1928 height=1208 is_input=0 DEBUG: ==> option 60: format= 34 width=1920 height=1080 is_input=0 DEBUG: ==> option 64: format= 34 width=1920 height=1080 is_input=1 DEBUG: ==> option 68: format= 35 width=1920 height=1080 is_input=0 DEBUG: ==> option 72: format= 35 width=1920 height=1080 is_input=1 DEBUG: ==> option 76: format= 33 width=1920 height=1080 is_input=0 DEBUG: ==> option 80: format= 34 width=1600 height=1200 is_input=0 DEBUG: ==> option 84: format= 34 width=1600 height=1200 is_input=1 DEBUG: ==> option 88: format= 35 width=1600 height=1200 is_input=0 DEBUG: ==> option 92: format= 35 width=1600 height=1200 is_input=1 DEBUG: ==> option 96: format= 33 width=1600 height=1200 is_input=0 DEBUG: ==> option 100: format= 34 width=1440 height=1080 is_input=0 DEBUG: ==> option 104: format= 34 width=1440 height=1080 is_input=1 DEBUG: ==> option 108: format= 35 width=1440 height=1080 is_input=0 DEBUG: ==> option 112: format= 35 width=1440 height=1080 is_input=1 DEBUG: ==> option 116: format= 33 width=1440 height=1080 is_input=0 DEBUG: ==> option 120: format= 34 width=1280 height= 960 is_input=0 DEBUG: ==> option 124: format= 34 width=1280 height= 960 is_input=1 DEBUG: ==> option 128: format= 35 width=1280 height= 960 is_input=0 DEBUG: ==> option 132: format= 35 width=1280 height= 960 is_input=1 DEBUG: ==> option 136: format= 33 width=1280 height= 960 is_input=0 DEBUG: ==> option 140: format= 34 width=1280 height= 800 is_input=0 DEBUG: ==> option 144: format= 34 width=1280 height= 800 is_input=1 DEBUG: ==> option 148: format= 35 width=1280 height= 800 is_input=0 DEBUG: ==> option 152: format= 35 width=1280 height= 800 is_input=1 DEBUG: ==> option 156: format= 33 width=1280 height= 800 is_input=0 DEBUG: ==> option 160: format= 34 width=1280 height= 768 is_input=0 DEBUG: ==> option 164: format= 34 width=1280 height= 768 is_input=1 DEBUG: ==> option 168: format= 35 width=1280 height= 768 is_input=0 DEBUG: ==> option 172: format= 35 width=1280 height= 768 is_input=1 DEBUG: ==> option 176: format= 33 width=1280 height= 768 is_input=0 DEBUG: ==> option 180: format= 34 width=1280 height= 720 is_input=0 DEBUG: ==> option 184: format= 34 width=1280 height= 720 is_input=1 DEBUG: ==> option 188: format= 35 width=1280 height= 720 is_input=0 DEBUG: ==> option 192: format= 35 width=1280 height= 720 is_input=1 DEBUG: ==> option 196: format= 33 width=1280 height= 720 is_input=0 DEBUG: ==> option 200: format= 34 width=1080 height=1080 is_input=0 DEBUG: ==> option 204: format= 34 width=1080 height=1080 is_input=1 DEBUG: ==> option 208: format= 35 width=1080 height=1080 is_input=0 DEBUG: ==> option 212: format= 35 width=1080 height=1080 is_input=1 DEBUG: ==> option 216: format= 33 width=1080 height=1080 is_input=0 DEBUG: ==> option 220: format= 34 width=1024 height= 738 is_input=0 DEBUG: ==> option 224: format= 34 width=1024 height= 738 is_input=1 DEBUG: ==> option 228: format= 35 width=1024 height= 738 is_input=0 DEBUG: ==> option 232: format= 35 width=1024 height= 738 is_input=1 DEBUG: ==> option 236: format= 33 width=1024 height= 738 is_input=0 DEBUG: ==> option 240: format= 34 width=1024 height= 768 is_input=0 DEBUG: ==> option 244: format= 34 width=1024 height= 768 is_input=1 DEBUG: ==> option 248: format= 35 width=1024 height= 768 is_input=0 DEBUG: ==> option 252: format= 35 width=1024 height= 768 is_input=1 DEBUG: ==> option 256: format= 33 width=1024 height= 768 is_input=0 DEBUG: ==> option 260: format= 34 width= 864 height= 480 is_input=0 DEBUG: ==> option 264: format= 34 width= 864 height= 480 is_input=1 DEBUG: ==> option 268: format= 35 width= 864 height= 480 is_input=0 DEBUG: ==> option 272: format= 35 width= 864 height= 480 is_input=1 DEBUG: ==> option 276: format= 33 width= 864 height= 480 is_input=0 DEBUG: ==> option 280: format= 34 width= 800 height= 600 is_input=0 DEBUG: ==> option 284: format= 34 width= 800 height= 600 is_input=1 DEBUG: ==> option 288: format= 35 width= 800 height= 600 is_input=0 DEBUG: ==> option 292: format= 35 width= 800 height= 600 is_input=1 DEBUG: ==> option 296: format= 33 width= 800 height= 600 is_input=0 DEBUG: ==> option 300: format= 34 width= 800 height= 480 is_input=0 DEBUG: ==> option 304: format= 34 width= 800 height= 480 is_input=1 DEBUG: ==> option 308: format= 35 width= 800 height= 480 is_input=0 DEBUG: ==> option 312: format= 35 width= 800 height= 480 is_input=1 DEBUG: ==> option 316: format= 33 width= 800 height= 480 is_input=0 DEBUG: ==> option 320: format= 34 width= 720 height=1280 is_input=0 DEBUG: ==> option 324: format= 34 width= 720 height=1280 is_input=1 DEBUG: ==> option 328: format= 35 width= 720 height=1280 is_input=0 DEBUG: ==> option 332: format= 35 width= 720 height=1280 is_input=1 DEBUG: ==> option 336: format= 33 width= 720 height=1280 is_input=0 DEBUG: ==> option 340: format= 34 width= 720 height= 480 is_input=0 DEBUG: ==> option 344: format= 34 width= 720 height= 480 is_input=1 DEBUG: ==> option 348: format= 35 width= 720 height= 480 is_input=0 DEBUG: ==> option 352: format= 35 width= 720 height= 480 is_input=1 DEBUG: ==> option 356: format= 33 width= 720 height= 480 is_input=0 DEBUG: ==> option 360: format= 34 width= 640 height= 512 is_input=0 DEBUG: ==> option 364: format= 34 width= 640 height= 512 is_input=1 DEBUG: ==> option 368: format= 35 width= 640 height= 512 is_input=0 DEBUG: ==> option 372: format= 35 width= 640 height= 512 is_input=1 DEBUG: ==> option 376: format= 33 width= 640 height= 512 is_input=0 DEBUG: ==> option 380: format= 34 width= 640 height= 480 is_input=0 DEBUG: ==> option 384: format= 34 width= 640 height= 480 is_input=1 DEBUG: ==> option 388: format= 35 width= 640 height= 480 is_input=0 DEBUG: ==> option 392: format= 35 width= 640 height= 480 is_input=1 DEBUG: ==> option 396: format= 33 width= 640 height= 480 is_input=0 DEBUG: ==> option 400: format= 34 width= 640 height= 400 is_input=0 DEBUG: ==> option 404: format= 34 width= 640 height= 400 is_input=1 DEBUG: ==> option 408: format= 35 width= 640 height= 400 is_input=0 DEBUG: ==> option 412: format= 35 width= 640 height= 400 is_input=1 DEBUG: ==> option 416: format= 33 width= 640 height= 400 is_input=0 DEBUG: ==> option 420: format= 34 width= 640 height= 360 is_input=0 DEBUG: ==> option 424: format= 34 width= 640 height= 360 is_input=1 DEBUG: ==> option 428: format= 35 width= 640 height= 360 is_input=0 DEBUG: ==> option 432: format= 35 width= 640 height= 360 is_input=1 DEBUG: ==> option 436: format= 33 width= 640 height= 360 is_input=0 DEBUG: ==> option 440: format= 34 width= 352 height= 288 is_input=0 DEBUG: ==> option 444: format= 34 width= 352 height= 288 is_input=1 DEBUG: ==> option 448: format= 35 width= 352 height= 288 is_input=0 DEBUG: ==> option 452: format= 35 width= 352 height= 288 is_input=1 DEBUG: ==> option 456: format= 33 width= 352 height= 288 is_input=0 DEBUG: ==> option 460: format= 34 width= 320 height= 240 is_input=0 DEBUG: ==> option 464: format= 34 width= 320 height= 240 is_input=1 DEBUG: ==> option 468: format= 35 width= 320 height= 240 is_input=0 DEBUG: ==> option 472: format= 35 width= 320 height= 240 is_input=1 DEBUG: ==> option 476: format= 33 width= 320 height= 240 is_input=0 DEBUG: ==> option 480: format= 34 width= 240 height= 320 is_input=0 DEBUG: ==> option 484: format= 34 width= 240 height= 320 is_input=1 DEBUG: ==> option 488: format= 35 width= 240 height= 320 is_input=0 DEBUG: ==> option 492: format= 35 width= 240 height= 320 is_input=1 DEBUG: ==> option 496: format= 33 width= 240 height= 320 is_input=0 DEBUG: ==> option 500: format= 34 width= 176 height= 144 is_input=0 DEBUG: ==> option 504: format= 34 width= 176 height= 144 is_input=1 DEBUG: ==> option 508: format= 35 width= 176 height= 144 is_input=0 DEBUG: ==> option 512: format= 35 width= 176 height= 144 is_input=1 DEBUG: ==> option 516: format= 33 width= 176 height= 144 is_input=0 DEBUG: ==> option 520: format= 37 width=2688 height=1520 is_input=0 DEBUG: ==> option 524: format= 38 width=2688 height=1520 is_input=0 DEBUG: ==> option 528: format= 32 width=2688 height=1520 is_input=0 DEBUG: ==> option 532: format= 36 width=2688 height=1520 is_input=0 DEBUG: ==> option 536: format= 37 width=1344 height= 760 is_input=0 DEBUG: ==> option 540: format= 38 width=1344 height= 760 is_input=0 DEBUG: ==> option 544: format= 32 width=1344 height= 760 is_input=0 DEBUG: ==> option 548: format= 36 width=1344 height= 760 is_input=0 DEBUG: ==> option 552: format= 37 width= 192 height=1080 is_input=0 DEBUG: ==> option 556: format= 38 width= 192 height=1080 is_input=0 DEBUG: ==> option 560: format= 32 width= 192 height=1080 is_input=0 DEBUG: ==> option 564: format= 36 width= 192 height=1080 is_input=0 ERROR: Camera 1 failed to find supported preview config: 2704x1540 WARNING: Failed to start cam hires2 due to invalid resolution WARNING: assuming cam is missing and trying to compensate{ "version": 0.1, "fsync_en": true, "fsync_gpio": 109, "cameras": [{ "type": "imx412", "name": "hires", "enabled": true, "camera_id": 0, "fps": 30, "en_preview": true, "preview_width": 3840, "preview_height": 2160, "en_raw_preview": false, "en_small_video": false, "small_video_width": 1024, "small_video_height": 768, "small_venc_mode": "h264", "small_venc_br_ctrl": "cqp", "small_venc_Qfixed": 30, "small_venc_Qmin": 15, "small_venc_Qmax": 40, "small_venc_nPframes": 9, "small_venc_mbps": 2, "small_venc_osd": false, "en_large_video": false, "large_video_width": 4056, "large_video_height": 3040, "large_venc_mode": "h264", "large_venc_br_ctrl": "cqp", "large_venc_Qfixed": 40, "large_venc_Qmin": 15, "large_venc_Qmax": 50, "large_venc_nPframes": 29, "large_venc_mbps": 40, "large_venc_osd": false, "en_snapshot": false, "en_snapshot_width": 4056, "en_snapshot_height": 3040, "exif_focal_length": 3.0999999046325684, "exif_focal_length_in_35mm_format": 17, "exif_fnumber": 1.2400000095367432, "snapshot_jpeg_quality": 75, "ae_mode": "off", "gain_min": 54, "gain_max": 8000 }, { "type": "imx664", "name": "hires2", "enabled": true, "camera_id": 1, "fps": 30, "en_preview": true, "preview_width": 2688, "preview_height": 1520, "en_raw_preview": true, "en_small_video": false, "small_video_width": 1024, "small_video_height": 768, "small_venc_mode": "h264", "small_venc_br_ctrl": "cqp", "small_venc_Qfixed": 30, "small_venc_Qmin": 15, "small_venc_Qmax": 40, "small_venc_nPframes": 9, "small_venc_mbps": 2, "small_venc_osd": false, "en_large_video": false, "large_video_width": 2688, "large_video_height": 1512, "large_venc_mode": "h264", "large_venc_br_ctrl": "cqp", "large_venc_Qfixed": 40, "large_venc_Qmin": 15, "large_venc_Qmax": 50, "large_venc_nPframes": 29, "large_venc_mbps": 40, "large_venc_osd": false, "en_snapshot": false, "en_snapshot_width": 2688, "en_snapshot_height": 1512, "exif_focal_length": 3.0999999046325684, "exif_focal_length_in_35mm_format": 17, "exif_fnumber": 1.2400000095367432, "snapshot_jpeg_quality": 75, "ae_mode": "off", "gain_min": 54, "gain_max": 8000, "en_misp": true, "misp_width": 1920, "misp_height": 1080, "misp_venc_enable": false, "misp_venc_mode": "h264", "misp_venc_br_ctrl": "cqp", "misp_venc_Qfixed": 30, "misp_venc_Qmin": 15, "misp_venc_Qmax": 50, "misp_venc_nPframes": 29, "misp_venc_mbps": 2, "misp_venc_osd": false, "misp_awb": "manual", "misp_gamma": 1.0 -
IMX664 MISP decoding issueHi i am currently working with the IMX 664 camera, and i want to use the MISP functionality so i can set the auto white-balance to manual, in order for it to stay constant, and the gamma correction to 1.0.
The images i get from the camera looks to be misdecoded:
it this a known issue, or is there a fix for this?Currently i am running this on the VOXL2 with SDK version 1.4.5, and my voxl-camera-server.conf looks like this:
/** * voxl-camera-server Configuration File * * Each camera has configurations for up to 4 HAL3 streams: * - `preview` stream for raw unprocessed images from CV cameras * - `small_video` 720p (ish) h264/h265 compressed for fpv video streaming * - `large_video` 4k (ish) h264/h265 for onboard video recording to disk * - `snapshot` ISP-processed JPG snapshots that get saved to disk * * on QRB5165 platforms (VOXL2 and VOXL2 mini) you can only have 3 of the 4 enabled * * This file is generated from default values by voxl-configure-cameras. * Do not expect arbitrary resolutions to work, the ISP and video compression * pipelines only support very specific resolutions. * * The default video compression mode is cqp or Constant Quantization Parameter * * * */ { "version": 0.1, "fsync_en": true, "fsync_gpio": 109, "cameras": [{ "type": "imx412", "name": "hires", "enabled": true, "camera_id": 0, "fps": 30, "en_preview": true, "preview_width": 3840, "preview_height": 2160, "en_raw_preview": false, "en_small_video": false, "small_video_width": 1024, "small_video_height": 768, "small_venc_mode": "h264", "small_venc_br_ctrl": "cqp", "small_venc_Qfixed": 30, "small_venc_Qmin": 15, "small_venc_Qmax": 40, "small_venc_nPframes": 9, "small_venc_mbps": 2, "small_venc_osd": false, "en_large_video": false, "large_video_width": 4056, "large_video_height": 3040, "large_venc_mode": "h264", "large_venc_br_ctrl": "cqp", "large_venc_Qfixed": 40, "large_venc_Qmin": 15, "large_venc_Qmax": 50, "large_venc_nPframes": 29, "large_venc_mbps": 40, "large_venc_osd": false, "en_snapshot": false, "en_snapshot_width": 4056, "en_snapshot_height": 3040, "exif_focal_length": 3.0999999046325684, "exif_focal_length_in_35mm_format": 17, "exif_fnumber": 1.2400000095367432, "snapshot_jpeg_quality": 75, "ae_mode": "off", "gain_min": 54, "gain_max": 8000 }, { "type": "imx664", "name": "hires2", "enabled": true, "camera_id": 1, "fps": 30, "en_preview": true, "preview_width": 1344, "preview_height": 760, "en_raw_preview": true, "en_small_video": false, "small_video_width": 1024, "small_video_height": 768, "small_venc_mode": "h264", "small_venc_br_ctrl": "cqp", "small_venc_Qfixed": 30, "small_venc_Qmin": 15, "small_venc_Qmax": 40, "small_venc_nPframes": 9, "small_venc_mbps": 2, "small_venc_osd": false, "en_large_video": false, "large_video_width": 2688, "large_video_height": 1512, "large_venc_mode": "h264", "large_venc_br_ctrl": "cqp", "large_venc_Qfixed": 40, "large_venc_Qmin": 15, "large_venc_Qmax": 50, "large_venc_nPframes": 29, "large_venc_mbps": 40, "large_venc_osd": false, "en_snapshot": false, "en_snapshot_width": 2688, "en_snapshot_height": 1512, "exif_focal_length": 3.0999999046325684, "exif_focal_length_in_35mm_format": 17, "exif_fnumber": 1.2400000095367432, "snapshot_jpeg_quality": 75, "ae_mode": "off", "gain_min": 54, "gain_max": 8000, "en_misp": true, "misp_width": -1, "misp_height": -1, "misp_venc_enable": false, "misp_venc_mode": "h264", "misp_venc_br_ctrl": "cqp", "misp_venc_Qfixed": 30, "misp_venc_Qmin": 15, "misp_venc_Qmax": 50, "misp_venc_nPframes": 29, "misp_venc_mbps": 2, "misp_venc_osd": false, "misp_awb": "manual", "misp_gamma": 1.0 }] } -
tracking down pipe switching to images of traccking front cameraHi @Alex-Kushleyev, thanks for the help. I have been trying a few configuration, different combinations with camera's cables, and coax boards. For my case it seems that the cable was not the issue but the camera. After changing this I have not seen it happen again.
-
tracking down pipe switching to images of traccking front camera@Alex-Kushleyev
This is the output i get fromdmesg -w, the i put 2 enters at the place where the camera stream duplicates.
I do see the same error mesages as you sent, but only with id 6 instead of 3. I am quite certain i am using the 8-bit drives, since the files in/usr/lib/camera/do not specify 10_bit, or 12_bit, and the output format of the sensor is RAW8[ 420.109884] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.60 [ 420.109907] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.56 [ 420.109942] qcom,camera ac50000.qcom,cci:qcom,cam-sensor2: Linked as a consumer to regulator.79 [ 420.123279] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 997 CAM_ACQUIRE_DEV Success, sensor_id:0x577,sensor_slave_addr:0x34 [ 420.180419] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.58 [ 420.182197] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.56 [ 420.184391] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.60 [ 420.184436] qcom,camera ac4f000.qcom,cci:qcom,cam-sensor0: Linked as a consumer to regulator.79 [ 420.194168] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:5 IPP resource not available [ 420.194171] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:4 IPP resource not available [ 420.194173] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:3 IPP resource not available [ 420.194175] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:2 IPP resource not available [ 420.194201] CAM_ERR: CAM-ISP: cam_ife_hw_mgr_print_acquire_info: 710 Successfully acquire single IFE[1 -1] with [11 pix] [0 pd] [0 rdi] ports for ctx:0 [ 420.199051] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 1137 START_DEV: CSIPHY_IDX: 1, Device_slot: 0, Datarate: 1500000000, Settletime: 2200000000 [ 420.204368] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 997 CAM_ACQUIRE_DEV Success, sensor_id:0x356,sensor_slave_addr:0x30 [ 420.207707] CAM_INFO: CAM-ISP: cam_vfe_bus_ver3_init_hw: 3659 Overriding clock gating at bus input [ 420.207712] CAM_INFO: CAM-ISP: cam_vfe_top_ver3_init_hw: 246 Disable clock gating at IFE top [ 420.207731] CAM_ERR: CAM-ISP: cam_ife_mgr_start_hw: 4510 ->Config HW, 000000002005597e [ 420.208476] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1089 CAM_START_DEV Success, sensor_id:0x577,sensor_slave_addr:0x34 [ 420.217046] CAM_INFO: CAM-ISP: __cam_isp_ctx_sof_in_epoch: 1660 First SOF in EPCR ctx:3 frame_id:1 next substate EPOCH [ 420.291920] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:5 IPP resource not available [ 420.291923] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:4 IPP resource not available [ 420.291925] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:3 IPP resource not available [ 420.291926] CAM_ERR: CAM-ISP: cam_ife_csid_cid_reserve: 1040 CSID:2 IPP resource not available [ 420.291947] CAM_ERR: CAM-ISP: cam_ife_hw_mgr_print_acquire_info: 710 Successfully acquire single IFE[0 -1] with [11 pix] [0 pd] [0 rdi] ports for ctx:4 [ 420.297184] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 1137 START_DEV: CSIPHY_IDX: 2, Device_slot: 0, Datarate: 1500000000, Settletime: 2200000000 [ 420.305641] CAM_INFO: CAM-ISP: cam_vfe_bus_ver3_init_hw: 3659 Overriding clock gating at bus input [ 420.305645] CAM_INFO: CAM-ISP: cam_vfe_top_ver3_init_hw: 246 Disable clock gating at IFE top [ 420.305659] CAM_ERR: CAM-ISP: cam_ife_mgr_start_hw: 4510 ->Config HW, 000000002005597e [ 420.306460] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1089 CAM_START_DEV Success, sensor_id:0x577,sensor_slave_addr:0x34 [ 420.315030] CAM_INFO: CAM-ISP: __cam_isp_ctx_sof_in_epoch: 1660 First SOF in EPCR ctx:4 frame_id:1 next substate EPOCH [ 420.531299] CAM_ERR: CAM-ISP: cam_ife_hw_mgr_print_acquire_info: 710 Successfully acquire single IFE[5 -1] with [0 pix] [0 pd] [1 rdi] ports for ctx:5 [ 420.532371] CAM_INFO: CAM-CSIPHY: cam_csiphy_core_cfg: 1137 START_DEV: CSIPHY_IDX: 0, Device_slot: 1, Datarate: 592000000, Settletime: 2800000000 [ 420.533160] CAM_INFO: CAM-ISP: cam_vfe_bus_ver3_init_hw: 3659 Overriding clock gating at bus input [ 420.533164] CAM_INFO: CAM-ISP: cam_vfe_top_ver3_init_hw: 246 Disable clock gating at IFE top [ 420.533174] CAM_ERR: CAM-ISP: cam_ife_mgr_start_hw: 4510 ->Config HW, 000000002005597e [ 420.555764] CAM_INFO: CAM-SENSOR: cam_sensor_driver_cmd: 1089 CAM_START_DEV Success, sensor_id:0x356,sensor_slave_addr:0x30 [ 423.218172] cam_ife_csid_irq: 73 callbacks suppressed [ 423.218177] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 423.218949] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 423.222473] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 424.215015] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 424.215712] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 424.218606] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 425.214507] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 425.215872] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 425.215911] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 425.216231] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.211853] cam_ife_csid_irq: 8 callbacks suppressed [ 429.211856] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.211948] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212130] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212208] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212289] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212672] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212811] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.212943] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.213919] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 429.214209] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214444] cam_ife_csid_irq: 45 callbacks suppressed [ 434.214448] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214659] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214698] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214739] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214778] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214818] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214838] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214858] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214878] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.214898] CAM_ERR: CAM-ISP: cam_ife_csid_irq: 4903 CSID:6 ERROR_CRC [ 434.215584] CAM_INFO: CAM-ISP: cam_ife_csid_halt_csi2: 1931 CSID: 6 cnt: 1 Halt csi2 rx [ 434.215593] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 0 CSIPHY index: 0 [ 434.215597] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 103 PHY base addr= pK-error offset=0x8b0 size=11 [ 434.215602] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR0 = 0xc4 [ 434.215607] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR1 = 0x1 [ 434.215611] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR2 = 0x0 [ 434.215616] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR3 = 0x0 [ 434.215620] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR4 = 0x0 [ 434.215625] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR5 = 0x0 [ 434.215629] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR6 = 0x7 [ 434.215633] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR7 = 0x0 [ 434.215638] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR8 = 0x60 [ 434.215642] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR9 = 0x50 [ 434.215647] CAM_INFO: CAM-CSIPHY: cam_csiphy_status_dmp: 117 CSIPHY0_IRQ_STATUS_ADDR10 = 0xc4 [ 434.215650] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 1 CSIPHY index: 0 [ 434.215653] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 2 CSIPHY index: 0 [ 434.215655] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 3 CSIPHY index: 0 [ 434.215658] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 4 CSIPHY index: 0 [ 434.215660] CAM_INFO: CAM-CSIPHY: cam_csiphy_subdev_handle_message: 22 subdev index : 5 CSIPHY index: 0 [ 434.215673] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4616 idx 6 err 5 phy 0 lane type:0 ln num:1 ln cfg:0x2 cnt 1 [ 434.215675] cam_csid_evt_bottom_half_handler: 1 callbacks suppressed [ 434.215677] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI0: cc0 [ 434.215678] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI1: 0 [ 434.215681] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI2: 0 [ 434.215683] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RDI3: 0 [ 434.215685] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status TOP: 0 [ 434.215687] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status RX: 80011 [ 434.215689] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status IPP: 0 [ 434.215691] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status PPP: 0 [ 434.215693] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status UDI0: 0 [ 434.215694] CAM_ERR: CAM-ISP: cam_csid_evt_bottom_half_handler: 4621 status UDI1: 0 -
tracking down pipe switching to images of traccking front cameraHi @Alex-Kushleyev, Maybe is should have specified this, but I installed the resistor on another VOXl which had the same issue, but is unable to fly because of other reasons. I am still able to reproduce this issue with the original VOXL mentioned.
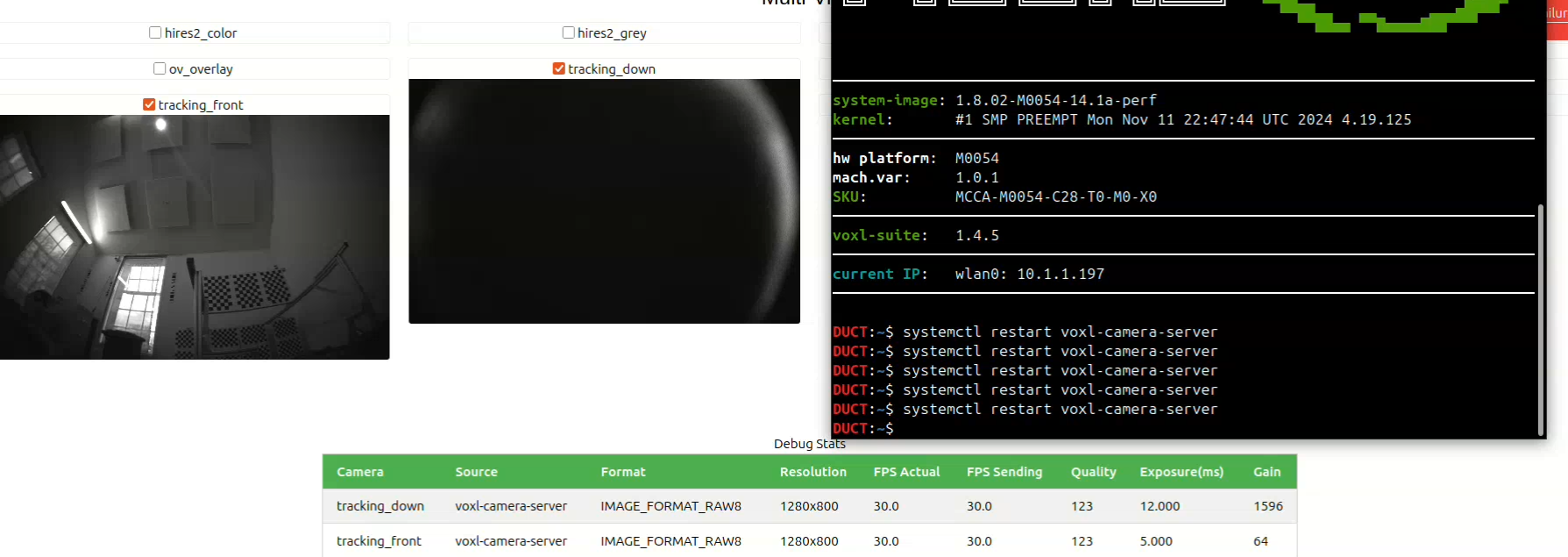
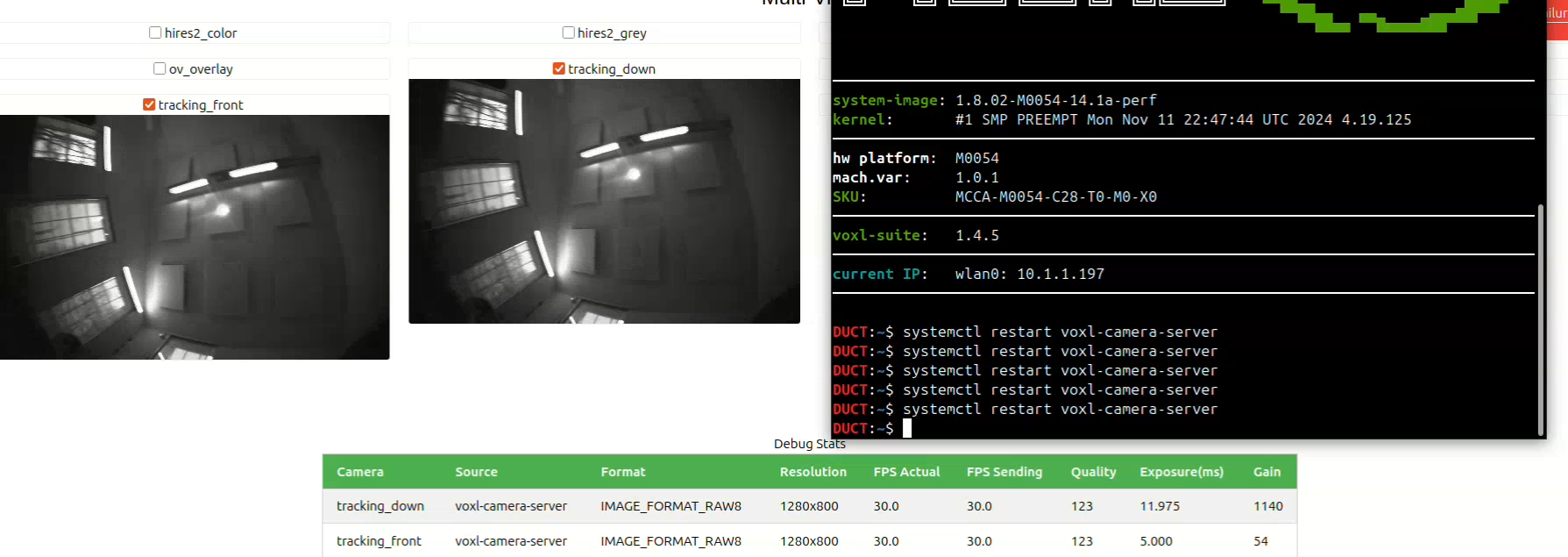
I did a test where i Covered up the
tracking_frontcamera while both streams gave the sane outtput.- The exposure and gain of the both camera's stay the same. Both when the
tracking_frontis covered, and when thetracking_downis covered. - When only
tracking_frontis covered, the exposure and gain increases. - when only
traccking_downis covered, non of the camera's increase their exposure or gain.
Let me know if you need me to run more tests, to try and figure thing out.
- The exposure and gain of the both camera's stay the same. Both when the
-
tracking down pipe switching to images of traccking front cameraHi @Alex-Kushleyev i ran the tests, and it seems that the issue only occurs when both the hires cameras are enabled. when one or the other is disabled, this problem does not occur. Also running the CPU in performance does make it run normally longer, but the stream still switches.
Looking again at the images of the VOXLs i notice that a resistor in the bottom left of the frame is not placed in the m0054 version that is placed in the m0154 version. I placed a 100k resistance there (same as on the other resistances.) and that seemed to work, at least for this VOXL. Could it be that this is related to the I2C address of the camera or the VOXL? -
tracking down pipe switching to images of traccking front camera@Alex-Kushleyev, By the way, as i was comparing this VOXL2 to one which does not have this same issue, i noticed that the board seemed to be an older one, could this have anything to do with it?
VOXL with the issue:

VOXL which behaves as expected:

-
tracking down pipe switching to images of traccking front camerahi @Alex-Kushleyev, i am not using the 10 or 12 bit drivers, everything was set up using
voxl-configure-cameras 28this is what the/usr/lib/camerafolder looks like (the .tuned files of the 412 camera were renamed in order to use the default .tuned files, which gave the best image for our application)

-
tracking down pipe switching to images of traccking front cameraHello I am encountering a weird issue using the M0173 with 2 IMX412 cameras and 2 AR0144 cameras.
The streams of the tracking cameras start out correct when (re)starting the voxl-camera-server, but after some point the tracking_down seems to copy the tracking_front images. Do you maybe know a solution for this problem? or have you seen this happen before? any help would be appreciated.
I am using sdk 1.4.5 on the drone. -
IMX412 (M12 style) not connecting on HW sensor ID 3Hi,
We are using the smaller IMX412 sensor (https://www.modalai.com/collections/accessories/products/msu-m0107?variant=45747768557872), and we noticed that this sensor was not able to be connected to while the older/larger version of this sensor connects to the same port without issue. Is this an known issue, or is there a way to solve this?
Some information about the setup:
We are running system image 1.6.2-M0054-14.1a-perf (SDK 1.0.0)
We also are running camera binaries from system image 1.7.1 for the IMX412 specifically.
We are connection 2 IMX412 cameras to hw sensor id's 2 and 3, and a tracking cam to hw sensor id 4. -
hi-res image quality difference VOXL and VOXL2Hi @Alex-Kushleyev
Thanks for the clarifications! A little bit of context for what purpose we use the camera's. We do analysis on the images taken, this analysis consists of detecting smaller features like plants on the image, usually the size of a couple pixels, i think in the neighborhood of 20x20 pixels most often. The amount of light available is dependent on the day, but usually there is enough light available that we can use short exposure times. (the tests above were indeed done inside the office and not in the practical sense we would otherwise use the drones.) For our applications the pixel noise is not that much of an issue as long as the features are visible. The video encoder we on not use.
As for the exposure times, these were set manually and not using the auto exposure as i thought this would be a fairer comparison. So in the images the gain was set to 400 and the exposure to 10ms, but the lighting conditions indoors are not that bight for the images, so the images were also somewhat darker than typically would be the case.
The idea of being able to tune the camera would be interesting for us, but i expect that would take some time to implement, but we are looking forward to it. -
hi-res image quality difference VOXL and VOXL2Hi @Alex-Kushleyev,
Thanks for the reaction, i tried the new camera binaries, and i think the images are better for it. Using the same features as before the image went from this:
to this:

There seems to be a bit more noise, but the quality of the image and especially the colors are better. I also tested on something closer by. old:
new:
Comparing these images it seems like before there was some kind of smoothing happening on the older version, that is now not happening anymore? also it seems that i need longer exposure times to reach the same brightness in the images. The resolution the camera server picks seems to be different from the config file. In the config file the resolution is set to 3000x4000.

Also when the camera is set to be 3840x2160 in the config file the resolution seems to be different, but in both cases the images coming through the pipe are in the expected format. so i don't know if this is an issue?

-
hi-res image quality difference VOXL and VOXL2Is there by any change any news on this?
-
hi-res image quality difference VOXL and VOXL2Hi @Alex-Kushleyev thanks for the reaction
To clarify, both images are take using the voxl-logger (from the hires_color stream), both the video streams are disabled on both the VOXL1 and VOXL2. (Both images are a crop from the full image, because the full image was to big to upload, and most of the rest of the image was a white background.)
The same camera is switched between the VOXL1 and the VOXL2, and the images are taken from the same distance to the object in the image.
VOXL 1 was set to 3840 x 2160 resolution, and the FPS was set to 30
VOXL2 was set to 4000 x 3000 resolution and the FPS was set to 15 -
hi-res image quality difference VOXL and VOXL2We are currently working with both the VOXL (SDK1.1.2) and the VOXL2 (SDK1.1.0) and we noticed some quality differences between the two platforms. The colors in the image taken with the VOXL (first image) seem to be better than on the VOXL2 (second image). Also the image seems to be more blurry on the VOXL2 while taken with the same camera (IMX412).
Both platforms were set to hires only, with AE_MODE set to "isp".
On the VOXL2 the camera is connected to HW sensor ID 2
Is this a known isue? or is there a way to get the same quality on the VOXL2 as on the VOXL?

We also noticed the snapshot on the VOXL not having the wierd artefact the VOXL2 has (as mentioned in this post https://forum.modalai.com/topic/2546/some-issues-with-voxl-camera-server-1-6-2?_=1707751139845) -
some issues with voxl-camera-server 1.6.2@Ariel-Young Thanks the new camera server works. The only thing is we still see the wierd repeating part in the image when using the snapshot function (top image), is this something you also see?
-
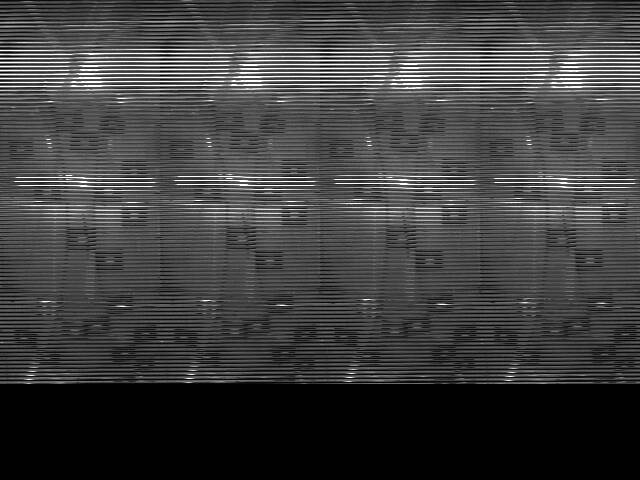
some issues with voxl-camera-server 1.6.2with the new SDK 1.0.0 we wanted to use the new snapshot functionality on the voxl2, but we notice that the images seem to have a part in the image where the image repeats itself.

Is there a solution for this, or is this a known issue?
This is something we see with both the IMX412 and the IMX214.Another thing we noticed was that the hires_color pipe shows images which are misdecoded,

but this seemed to be fixed in the latest stable branch on git. But now we noticed that only 1 camera can be active at a time using this version (voxl-camera-server 1.7.0). The tracking camera also seemed to return a clitched image:
Is this version not ready for use yet? and if so is it known when this version is stable? -
Image quality difference between Voxl and Voxl2The same quality difference is also seen in the IMX412 camera. where on the Voxl1, The image has less noise/looks sharper than on the Voxl2
-
Image quality difference between Voxl and Voxl2We have been working with the IMX214 image sensor on the Voxl and Voxl2, but we noticed there is a considerable difference in noise in the image between the 2 platforms, and also in the colour balancing.
for example these 2 images are taken using the same camera on a Voxl:

and the Voxl2:

more zoomed in for comparrison Voxl:
Voxl2:
Is there a way to get the same image quality from both Voxl and Voxl2?
We use the default settings ( voxl-configure-cameras 8 ) where we only change the resolution to 3840x2160.