Hi Alex,
Thank you for the reply!
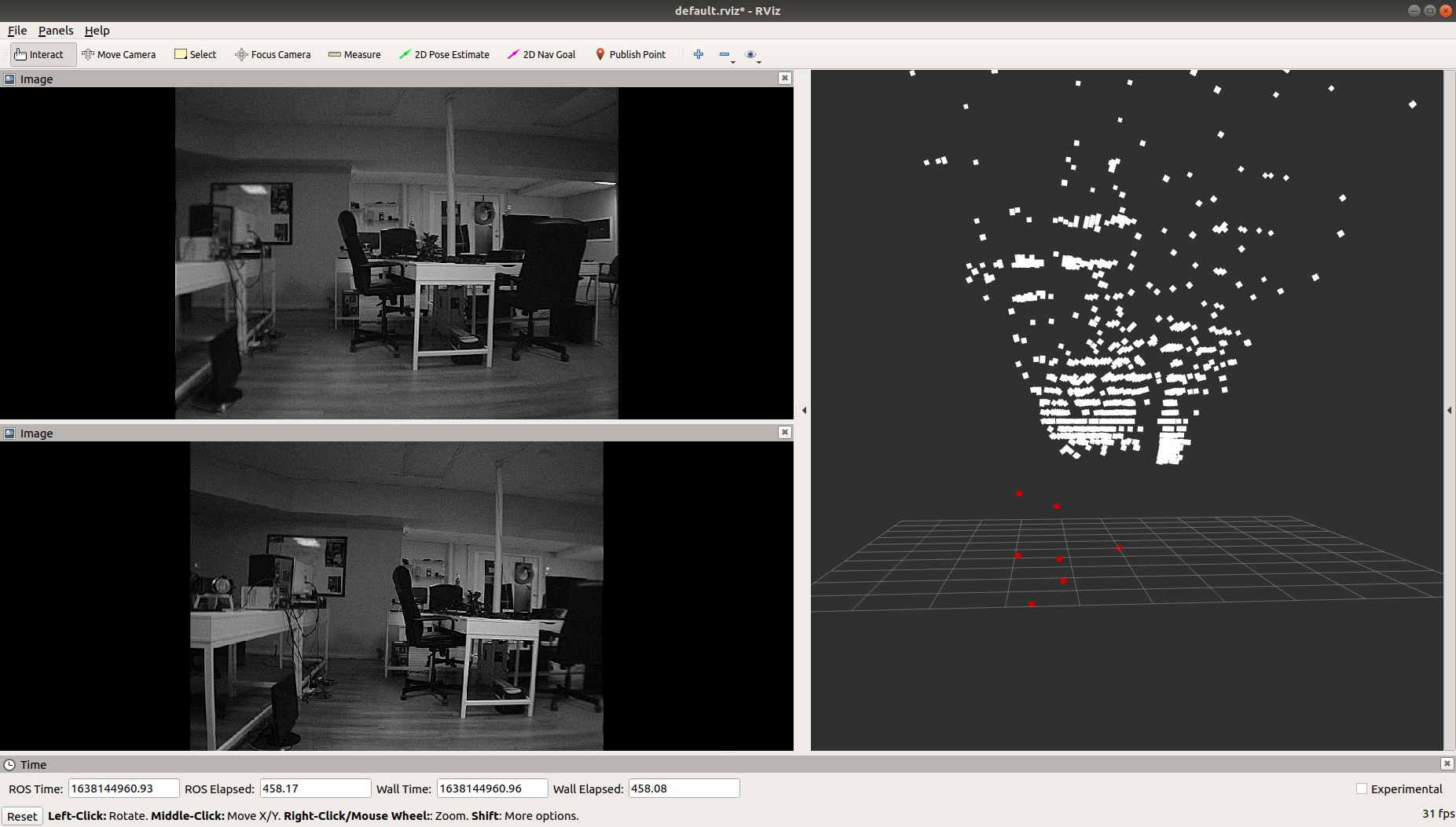
I've attached the stereo camera view, as well as disparity images. I think it shows enough features, but now I'm wondering why the distances array that gets calculated in voxl-vision-px4 sends out false positives, stating that there's an obstacle between 1.6m and 1.9m ahead, when clearly there isn't. This is what I see in terms of distances generated from the stereo camera view I have attached below:



Disparity raw (image saved by voxl-dfs-server -s):
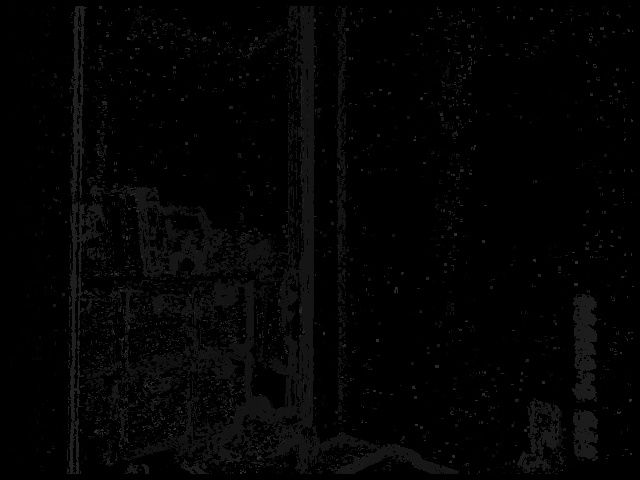
Disparity screenshots from web portal:
scaled:

raw:

Following is my camera calibration on unit M20000005FW:
Extrinsics:
%YAML:1.0
---
R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 9.9766949807073035e-01, 3.2726419179402305e-02,
5.9871145863353382e-02, -3.3135402553510745e-02,
9.9943374643317273e-01, 5.8507767150416416e-03,
-5.9645768642156684e-02, -7.8209959881417272e-03,
9.9818896723257755e-01 ]
T: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [ -8.0702806185923404e-02, 1.3414138137096483e-03,
7.4901499926949659e-03 ]
reprojection_error: 3.1717501660388558e-01
calibration_time: "2021-11-28 23:55:40"
Intrinsics:
%YAML:1.0
---
M1: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 4.9801509489639710e+02, 0., 3.4535141859544910e+02, 0.,
4.9660210124907837e+02, 2.5153003783439996e+02, 0., 0., 1. ]
D1: !!opencv-matrix
rows: 5
cols: 1
dt: d
data: [ -1.7398718943898814e-01, 6.8113519993759170e-02,
-7.1388044381347557e-05, -2.4636080589428406e-03, 0. ]
reprojection_error1: 3.9142503079362151e-01
M2: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 4.9189021103330248e+02, 0., 2.5268459489748463e+02, 0.,
4.9027463109482443e+02, 2.3132872578584897e+02, 0., 0., 1. ]
D2: !!opencv-matrix
rows: 5
cols: 1
dt: d
data: [ -1.6866195998342057e-01, 4.2438171238534744e-02,
1.8663371564379684e-04, 3.5401519495983939e-03, 0. ]
reprojection_error2: 4.0183396708155583e-01
width: 640
height: 480
distortion_model: plumb_bob
calibration_time: "2021-11-28 23:55:40"
Thanks again!