Hello, we are running into an issue where the qvio-server doesn't match with the odometry msgs published on /mavros/local_position/odom on the Starling platform.
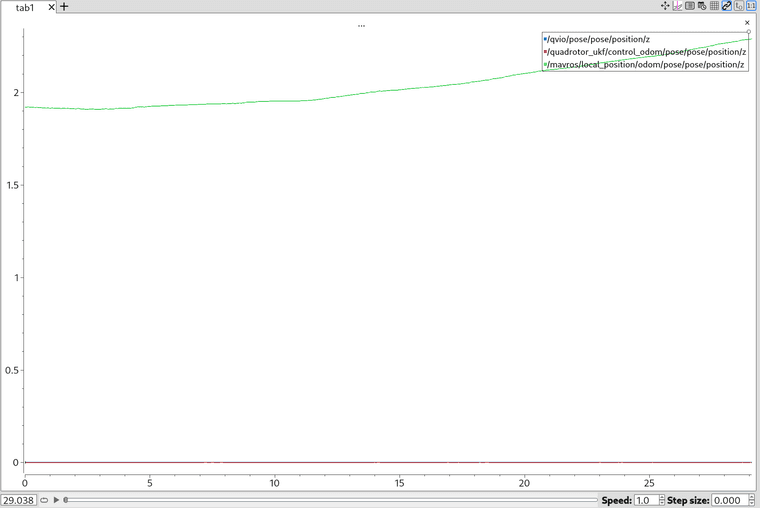
I have run plotted the qvio and mavros/local_position odometries over time and there is an extensive divergence with the platform completely still
Best posts made by Kashish Garg
-
Mavros/local_position/odom Z-Axis driftposted in Ask your questions right here!
-
RE: Mavros/local_position/odom Z-Axis driftposted in Ask your questions right here!
@Kashish-Garg Just bumping to get a hand with this. i have tried disabling Baro sensors and playing with enabling/disabling other sensors. Its clear the mavros/vision/pose is accurate, but on the z-axis in local_position is drifting/showing significant error. Any help is greatly appreciated!
Latest posts made by Kashish Garg
-
RE: MAVROS: `waiting for offboard mode` still loadingposted in ROS
@Denver-Bennett were you able to find a solution to this? same issue on our end
-
RE: MAVRS: offboard mode issues, ./run_mavros_test.shposted in ROS
@Denver-Bennett Were you able to find a solution to this? same issue on my end
-
RE: Mavros/local_position/odom Z-Axis driftposted in Ask your questions right here!
@Riccardo-Franceschini We were not able to resolve this issue. However because our control stack is sending TRPY commands to mavros, this didn't come into play at all. The concern for us originated when the drone was taking off significantly higher than commanded. It turned out the propeller coefficients we received from ModalAI were insufficient.
-
RE: Mavros/local_position/odom Z-Axis driftposted in Ask your questions right here!
@Kashish-Garg Just bumping to get a hand with this. i have tried disabling Baro sensors and playing with enabling/disabling other sensors. Its clear the mavros/vision/pose is accurate, but on the z-axis in local_position is drifting/showing significant error. Any help is greatly appreciated!
-
Mavros/local_position/odom Z-Axis driftposted in Ask your questions right here!
Hello, we are running into an issue where the qvio-server doesn't match with the odometry msgs published on /mavros/local_position/odom on the Starling platform.
I have run plotted the qvio and mavros/local_position odometries over time and there is an extensive divergence with the platform completely still
-
.bashrc and .bash_profile for Starling2posted in Ask your questions right here!
Hello,
We accidentally deleted the bashrc and bash profile for the starling 2 and wanted to see if I could be pointed to those files to place them back on the Starling2.
Thanks,
Kashish Garg -
RE: Unable to retrieve camera informationposted in Ask your questions right here!
@Riccardo-Franceschini We have the same question, were you able to receive any update on this?
-
Starling 2 qvio/odometry covariance all zeroesposted in Ask your questions right here!
I read that the "quality" reported by the qvio process is generated from the covariance matrix of the onboard state estimation.
After running voxl_mpa_to_ros, these covariance values are all set to zero.
Is there any work around/configuration for the starling to report the actual covariance values it uses to generate the quality? -
RE: Questions for VOXL2 and Sentinelposted in VOXL 2
@modaltb Hello, I was curious if there were any new plans to support Ubuntu20 in an upcoming System Image release. I apologize if this question gets asked to death, I am new to these forums.
Thanks