Hello, we are running into an issue where the qvio-server doesn't match with the odometry msgs published on /mavros/local_position/odom on the Starling platform.
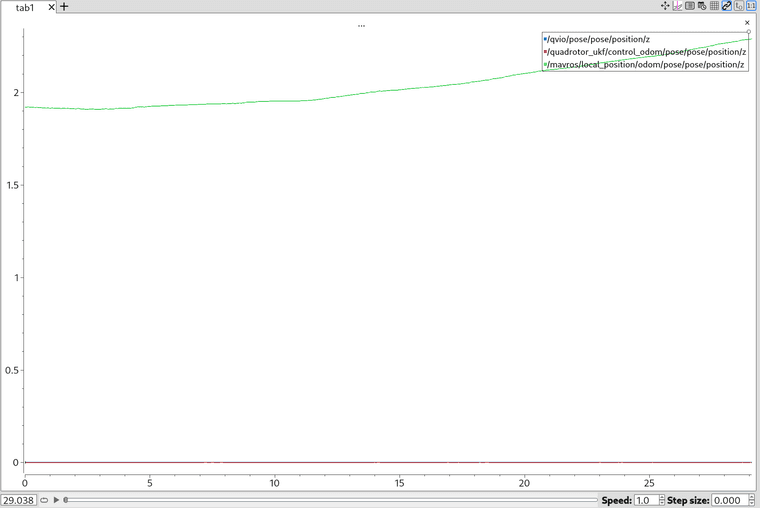
I have run plotted the qvio and mavros/local_position odometries over time and there is an extensive divergence with the platform completely still
Kashish Garg
@Kashish Garg
Posts
-
Mavros/local_position/odom Z-Axis drift -
Mavros/local_position/odom Z-Axis drift@Kashish-Garg Just bumping to get a hand with this. i have tried disabling Baro sensors and playing with enabling/disabling other sensors. Its clear the mavros/vision/pose is accurate, but on the z-axis in local_position is drifting/showing significant error. Any help is greatly appreciated!