Help! lossing data from camera + IMU tracking
-
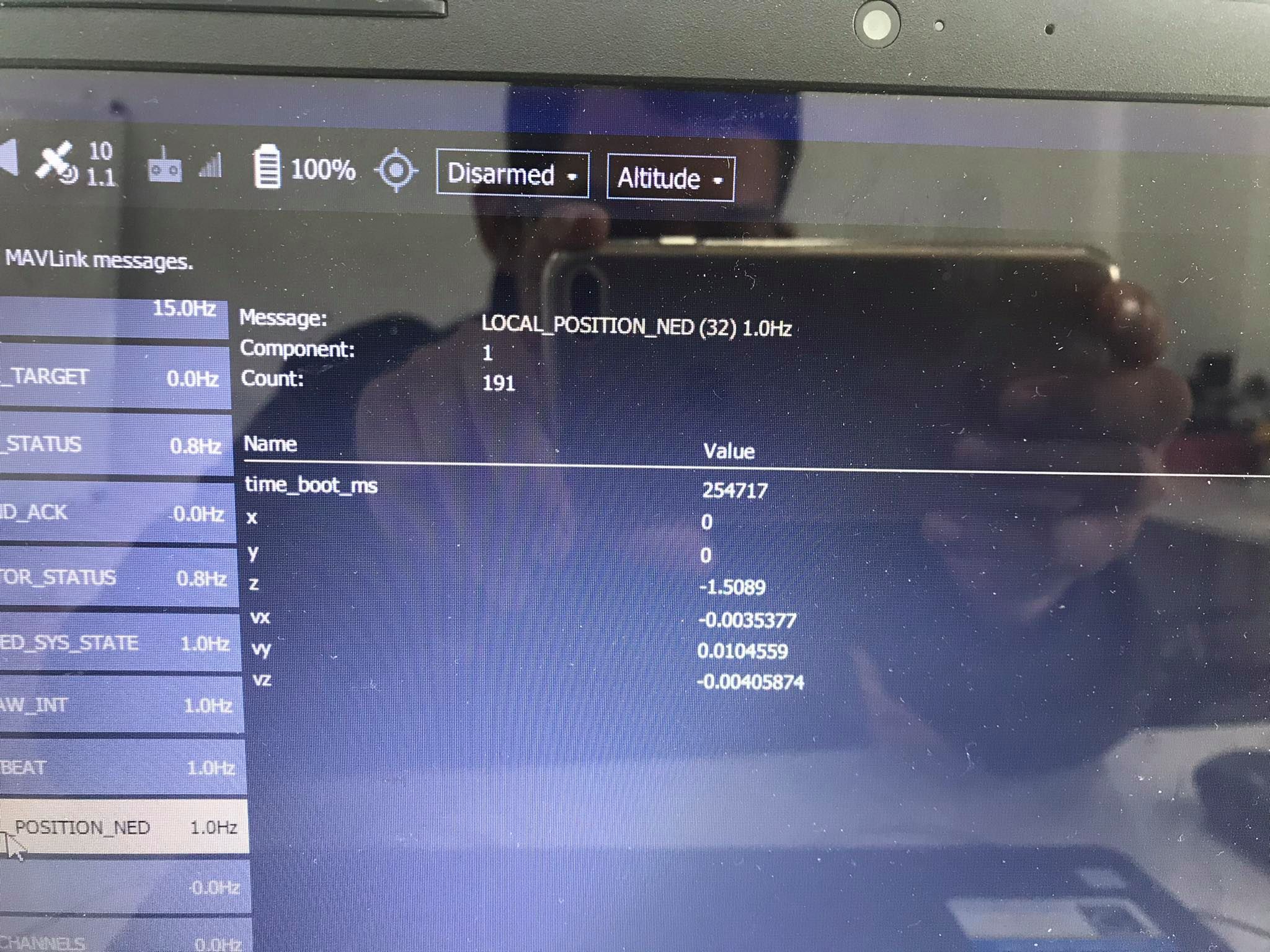
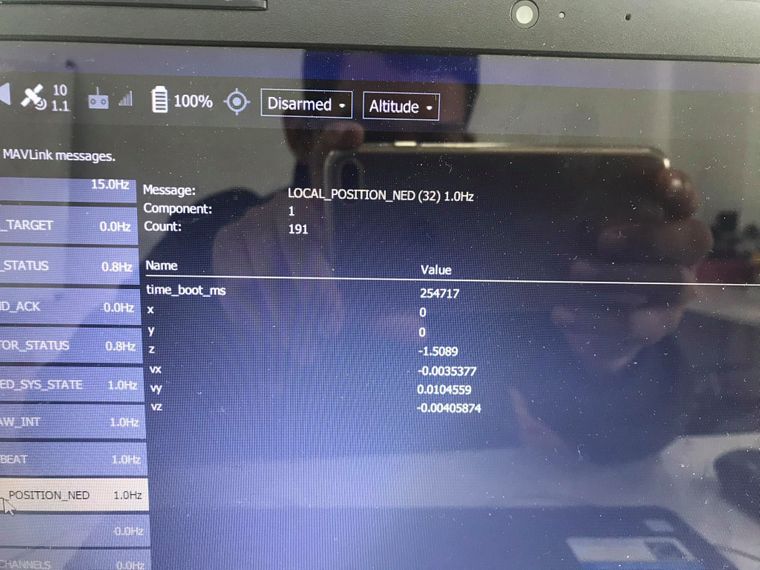
Hello, im working with m500 drone. when i starting with ROS, i was calibration camera here. after that m500 cannot display the value of x,y in NED position in QGC (just remain Z value). after reading document i think the SNAV was reset after i ran config command. it's right?
Then the solution is recalib the Modalai Visio Lib at here? but what is the selection for IMU and tracking camera? Please confirm if i miss anything.
-
Hello,
The M500 should have been sent to you all configured and working. Do you mind stopping the voxl-vision-px4 service and running voxl-test-vision-lib to see if VIO is working? You can use the following commands:
systemctl stop voxl-vision-px4
voxl-test-vision-lib -o -
Hello,
The M500 should have been sent to you all configured and working. Do you mind stopping the voxl-vision-px4 service and running voxl-test-vision-lib to see if VIO is working? You can use the following commands:
systemctl stop voxl-vision-px4
voxl-test-vision-lib -o@James-Strawson said in Help! lossing data from camera + IMU tracking:
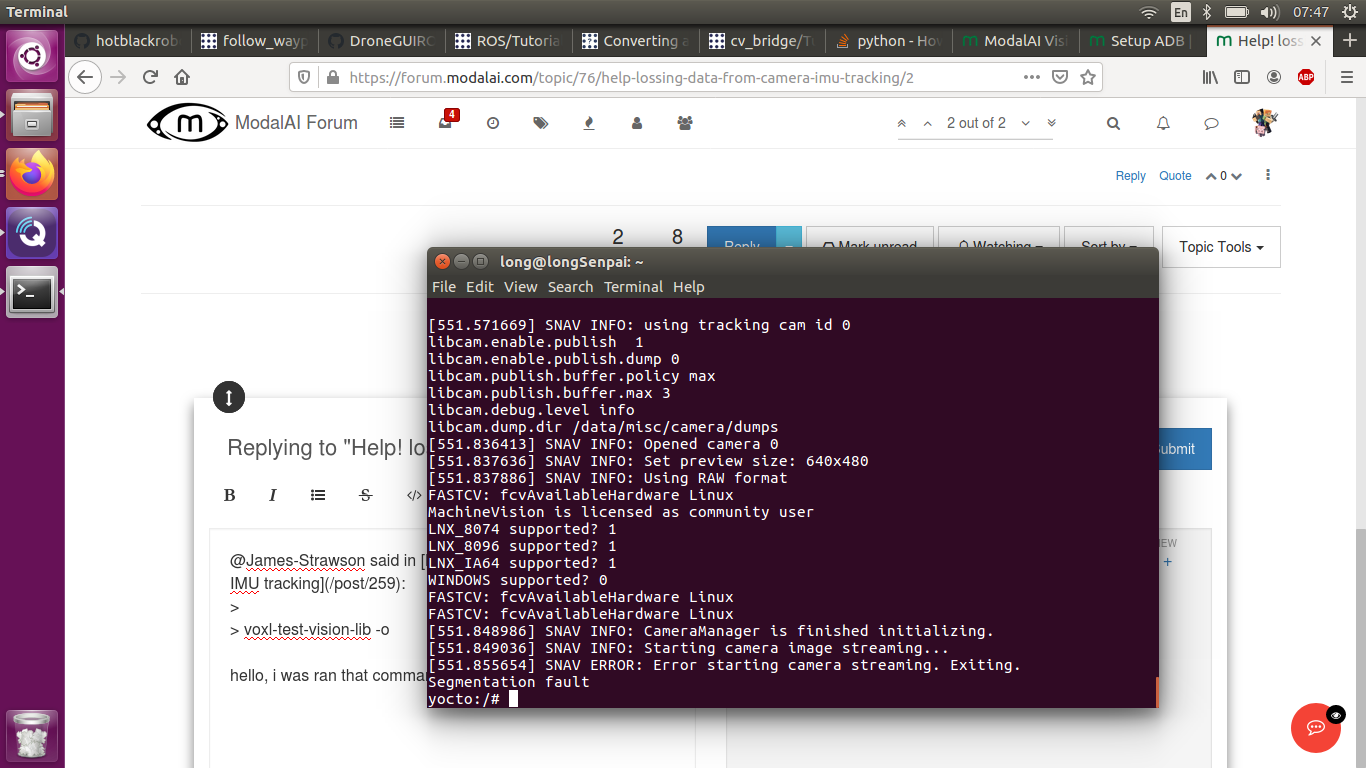
voxl-test-vision-lib -o
hello, i was ran that command and it's have an error.
-
@James-Strawson said in Help! lossing data from camera + IMU tracking:
voxl-test-vision-lib -o
hello, i was ran that command and it's have an error.
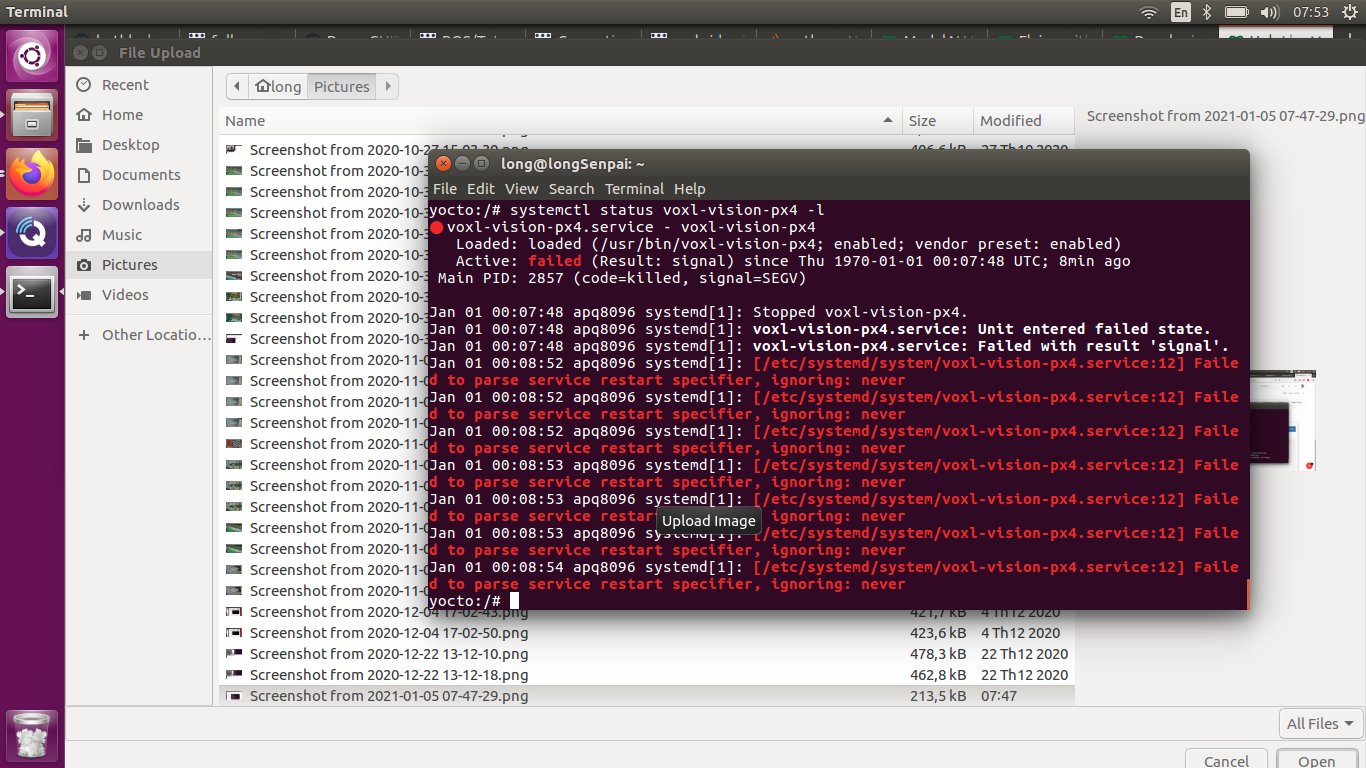
@Vũ-Văn-Long and after i run command check the status
-
Problem Solved. for anyone in the future have similar case just perform factory configuration for VOXL Flight Deck by
"voxl-configure-vision-px4 -f" and then re-connect to QGC and you will see the miracle. -
Problem Solved. for anyone in the future have similar case just perform factory configuration for VOXL Flight Deck by
"voxl-configure-vision-px4 -f" and then re-connect to QGC and you will see the miracle.@Vũ-Văn-Long wow amazing goodjob
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login