Issues with controller and drone
-
@daniellee Okay, there's a lot going on here. Let's try to focus on one thing at a time. Why did you issue
systemctl stop voxl-px4? When you do that you need to wait a few seconds before trying to restart voxl-px4. Then use the commandvoxl-px4 -d, don't try to start it with/usr/bin/voxl-px4-start. Orsystemctl start voxl-px4. But why were you doing that in the first place?@Eric-Katzfey The desicion to use systemctl start voxl-px4 was because from what i understand it is that the system boots and services necessary to flight should be enabled and running once a preflight has passed. Our preflight was showing pass but the systems never enabled even though the preset is enabled.
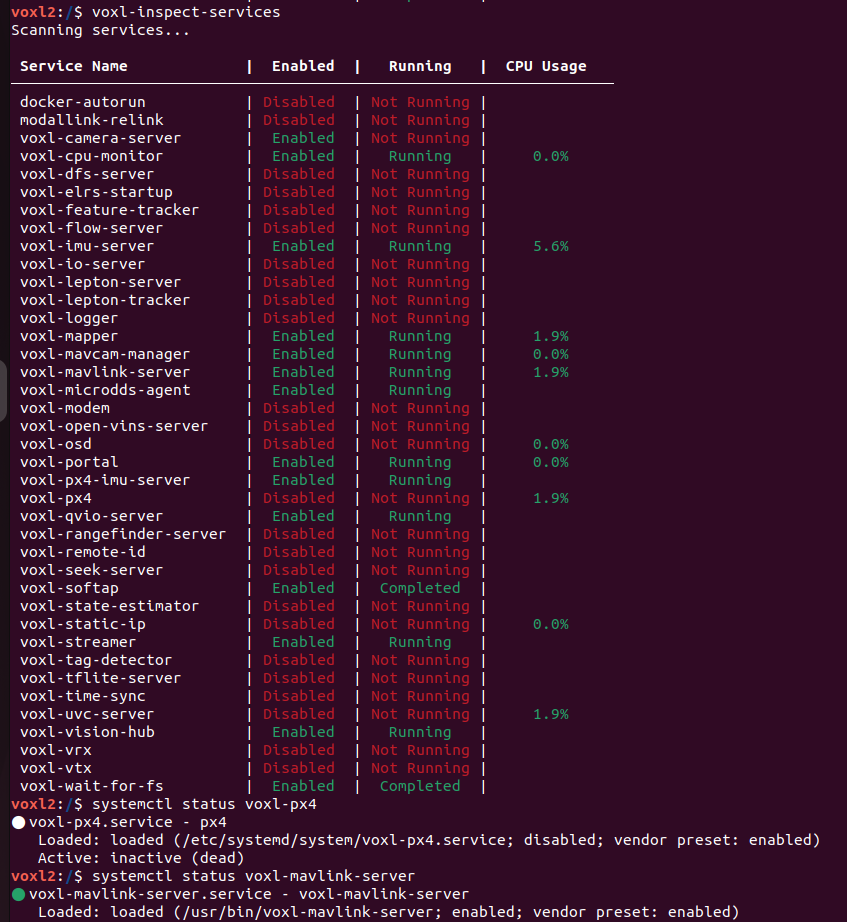
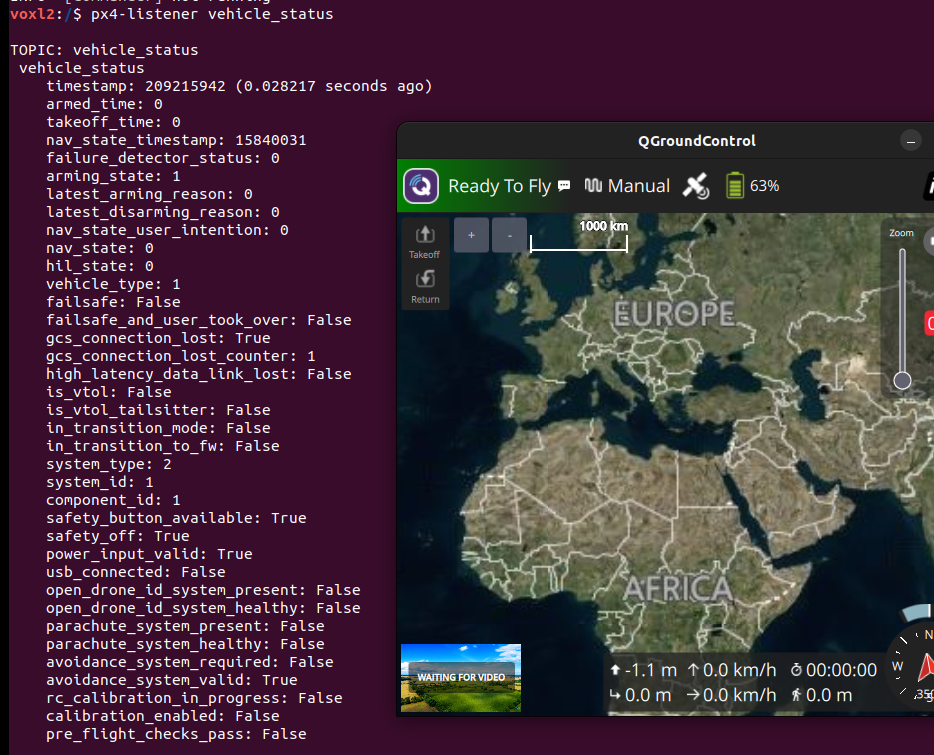
So I am trying to force it to start.When I force it to start I can run the following commands to verify that my preflight has failed in the px4.
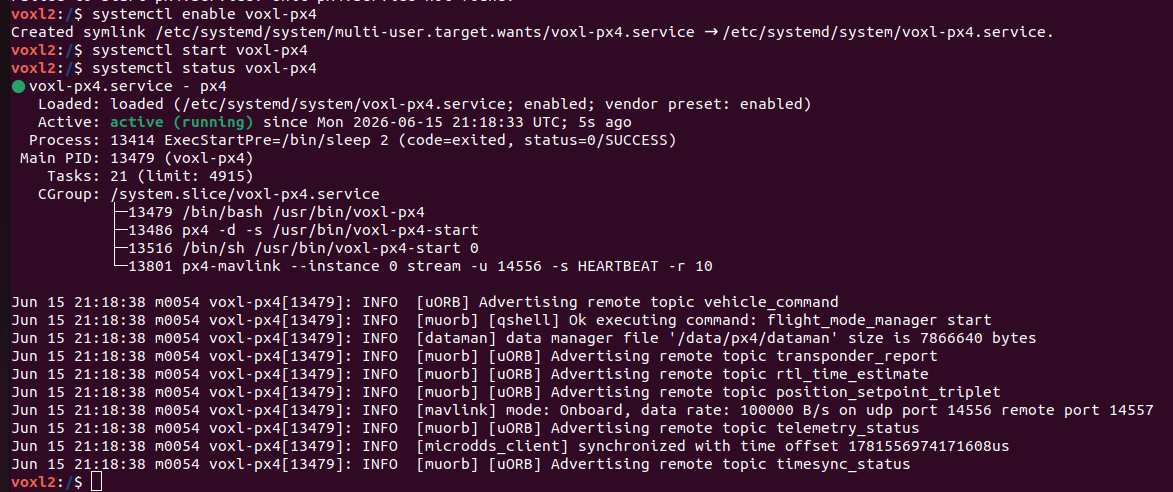
Now the system is up and running
Now to check the preflight status:
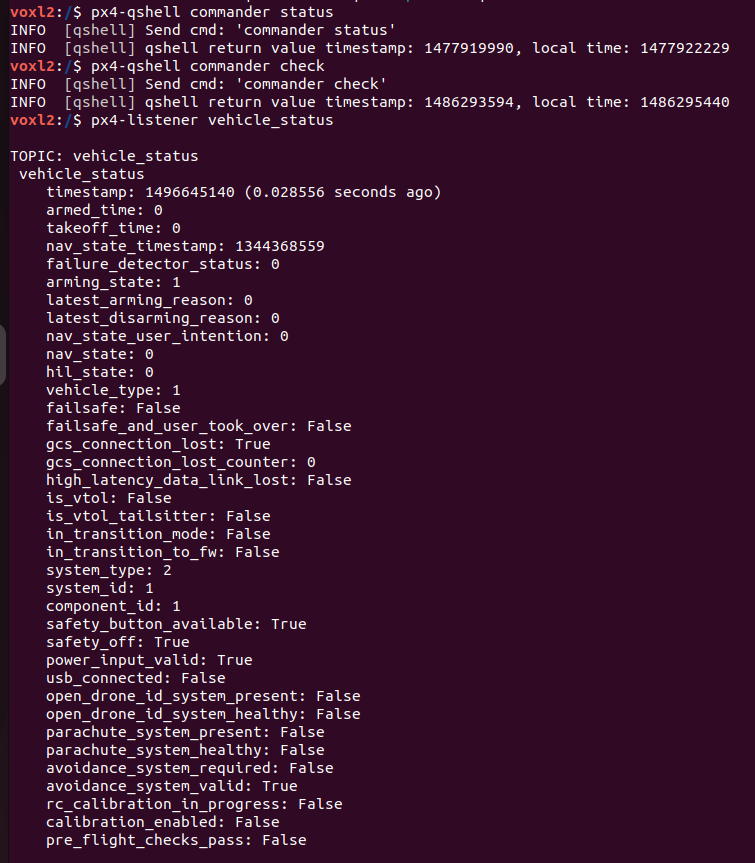
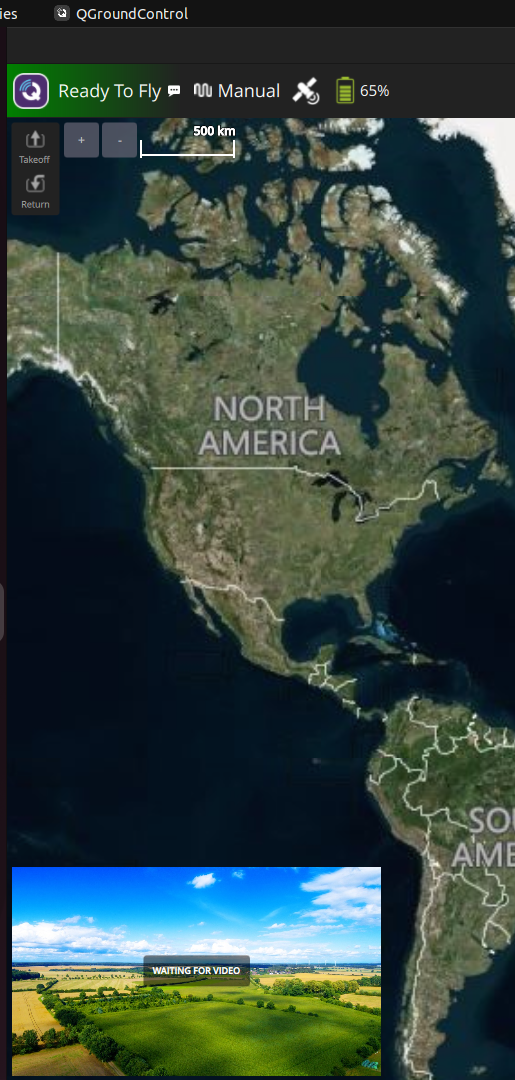
Here the preflight has failed but in QGround Control its stating a pass and that we are ready to fly.
-
@Eric-Katzfey Hello Eric! Thank you for replying, we were doing that because it was what chatgpt asked and recommended us to do to try to reboot the PX4 system.
@daniellee Okay, well I would have just recommended power cycling the drone. Let's look at your personal drone now. Seems that the RC is working fine since you can see it in QGC. Why do you say it is not receiving inputs from the RC? What are you doing that convinces you of that?
-
@daniellee said in Issues with controller and drone:
Our preflight was showing pass but the systems never enabled even though the preset is enabled.
What do you mean that the systems never enabled? What systems? How are you trying to enable them? What is the preset you are talking about? Looking at the QGC screen it looks like it is ready to arm. Can you arm it via QGC?
-
@daniellee Okay, well I would have just recommended power cycling the drone. Let's look at your personal drone now. Seems that the RC is working fine since you can see it in QGC. Why do you say it is not receiving inputs from the RC? What are you doing that convinces you of that?
@Eric-Katzfey That is the problem. Every time I power cycle the system, it does not keep the services necessary for flight enabled. I will power cycle the drone to show that it does not stay enabled. After power cycling I enabled the px4 service because it was not enable on start up so that I can view the vehicle status.
The preflight failed in the adb shell. But is passing in QGC.I can see the radio RC transmitter moving the joysticks in QGC but the drone does NOT take off. So movement commands sent via the controller are being seen but not used by the drone.
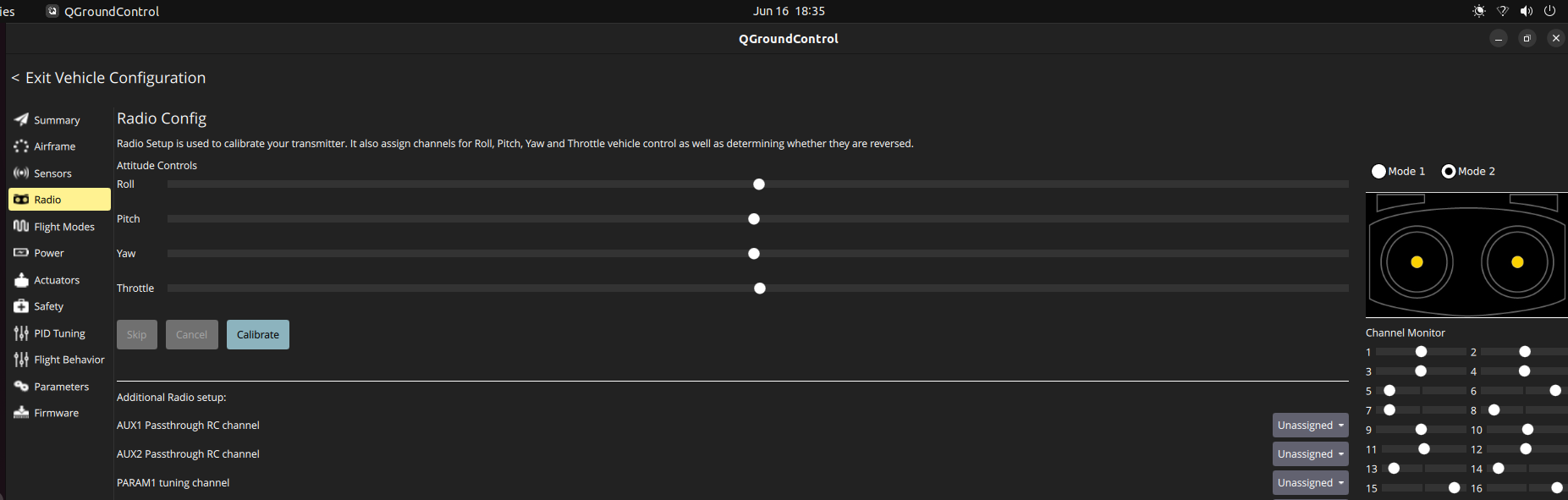
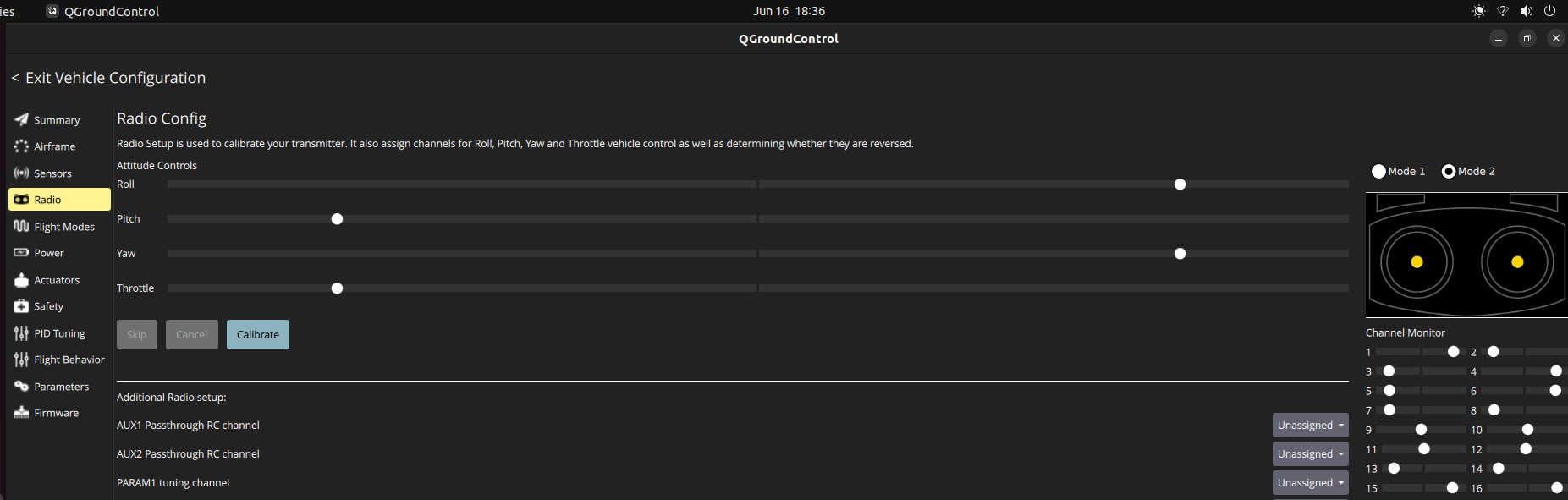
This is what I mean by the joystick inputs not working. These photos show that the controller is connected and the inputs are being read. However, the drone is not using them. -
@Eric-Katzfey That is the problem. Every time I power cycle the system, it does not keep the services necessary for flight enabled. I will power cycle the drone to show that it does not stay enabled. After power cycling I enabled the px4 service because it was not enable on start up so that I can view the vehicle status.
The preflight failed in the adb shell. But is passing in QGC.I can see the radio RC transmitter moving the joysticks in QGC but the drone does NOT take off. So movement commands sent via the controller are being seen but not used by the drone.
This is what I mean by the joystick inputs not working. These photos show that the controller is connected and the inputs are being read. However, the drone is not using them.@daniellee So when you power cycle the drone and then adb in and do
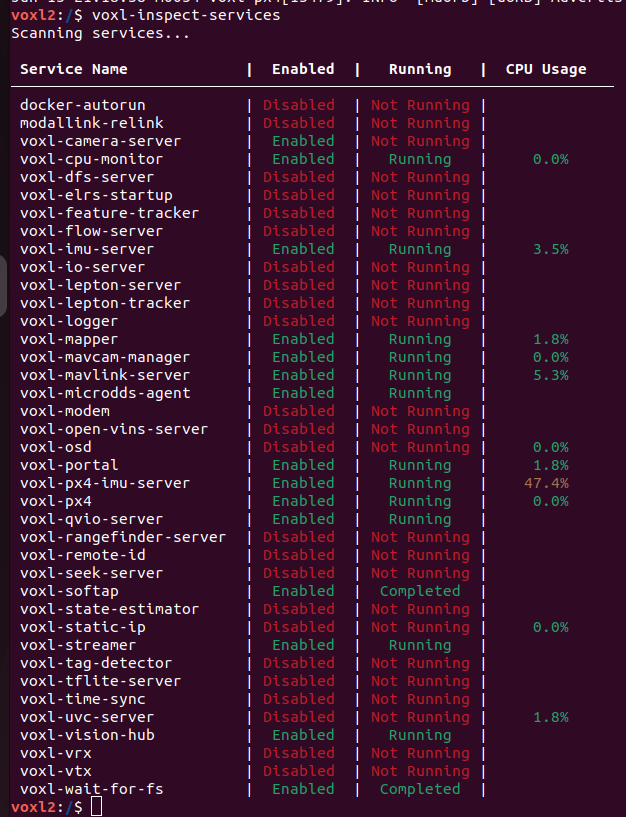
voxl-inspect-serviceswhich services are not enabled and running that you think should be? In your earlier screen shotvoxl-px4, andvoxl-mavlink-serverwere both enabled and running. What other services do you think you need for flight? That's all that should be required for manual flight mode. -
@daniellee So when you power cycle the drone and then adb in and do
voxl-inspect-serviceswhich services are not enabled and running that you think should be? In your earlier screen shotvoxl-px4, andvoxl-mavlink-serverwere both enabled and running. What other services do you think you need for flight? That's all that should be required for manual flight mode.@Eric-Katzfey I understand that but do you know why the controller inputs arent being received by the drone? We have no idea what is causing this.
-
@Eric-Katzfey I understand that but do you know why the controller inputs arent being received by the drone? We have no idea what is causing this.
@daniellee I don't know what that means. If you can see the RC sticks / switches at QGC then PX4 has to be seeing them. What happens when you try to arm the drone from QGC?
-
@daniellee I don't know what that means. If you can see the RC sticks / switches at QGC then PX4 has to be seeing them. What happens when you try to arm the drone from QGC?
@Eric-Katzfey It gets armed but the drone does not fly/respond to the controller inputs.
-
@Eric-Katzfey It gets armed but the drone does not fly/respond to the controller inputs.
@daniellee Ah, okay, now we're getting somewhere. If it is arming that means you see the propellers spinning? Can you send me the log file from px4? (Look in
/data/px4/logs). -
@daniellee Ah, okay, now we're getting somewhere. If it is arming that means you see the propellers spinning? Can you send me the log file from px4? (Look in
/data/px4/logs).@Eric-Katzfey Hi Eric Im not at the computer right now and the px4 logs are the same as the ones above, the props arent spinning even when armed on QGroundControl.
-
@Eric-Katzfey Hi Eric Im not at the computer right now and the px4 logs are the same as the ones above, the props arent spinning even when armed on QGroundControl.
@daniellee I don't see any log files attached in this thread.
-
@daniellee I don't see any log files attached in this thread.
@Eric-Katzfey I have the PX4 log files in a zipped folder but I do not see a way to upload them to the forum.
-
@daniellee I don't see any log files attached in this thread.
@Eric-Katzfey Hello Eric I have downloaded the PX4 logs- I managed to get a link for one of the logs, the internal timestamp is messed up and I believe this is the most recent one. Here is the link : https://logs.px4.io/plot_app?log=db2c6cd3-f6c9-4bf8-b5bc-dc5ac185c752
-
@daniellee So when you power cycle the drone and then adb in and do
voxl-inspect-serviceswhich services are not enabled and running that you think should be? In your earlier screen shotvoxl-px4, andvoxl-mavlink-serverwere both enabled and running. What other services do you think you need for flight? That's all that should be required for manual flight mode.@Eric-Katzfey said in Issues with controller and drone:
In your earlier screen shot voxl-px4, and voxl-mavlink-server were both enabled and running.
Just to be clear, that image you are referencing was the second photo related to the
voxl-inspect-servicesafter I enabled and started the px4 service. The first photo shows it not enabled and not running.Upon power cycling, I have to enable it every time we attempt to fly.
-
@Eric-Katzfey Hello Eric I have downloaded the PX4 logs- I managed to get a link for one of the logs, the internal timestamp is messed up and I believe this is the most recent one. Here is the link : https://logs.px4.io/plot_app?log=db2c6cd3-f6c9-4bf8-b5bc-dc5ac185c752
@daniellee This log shows a normal flight happening in altitude hold mode. RC inputs are coming in and motors are spinning. Was there some issue with the flight this log was captured from?
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login