Motor issues when running ESC calibration
-
@Alexander-Saunders , OK, thanks, i don't see anything particularly wrong with using those params (even though the are from the old folder). I will do a test using these params and another similar motor just to check this.
I checked i only have the 1500kV version of your motor (i thought i had 2850, but cannot locate it at the moment). If i had the exact motor, i could test it. I will look again.
I just realized that the calibration script in the current state will not correctly show the total current on M0138 ESC (will show just zero). I need to make a small change to fix that.
one test that is similar to the calibration, but will show the current is the following:
./voxl-esc-spin.py --id 3 --power 40 --ramp-time 2.0 --timeout 2.5 --enable-plot 1 --cmd-rate 250This will spin id3 3 from 10 to 40 % power, it will take 2 seconds to ramp up the power and the test will end in 2.5 seconds and generate the plot (save to disk, same folder as the script).
40% power should be safe to start, if you can run that test with a working motor, i can take a look at the plot (html) -- you can send a screen shot of the html after you view it in your browser.
If the plot looks good, we can increase the maximum power in the ramp (gradually) and see how the motor performs. Please use the battery. If you see any abnormal behavior or unreasonably large current (in this test should definitely be less than 10A), you can terminate the test even faster using control-c.
-
@Alex-Kushleyev Thank you! We will test and get back to you.
@rdjarvis I am sorry, i made a mistake, the FPV ESC (M0138) has total current sensing on ID2, so please use the following command:
./voxl-esc-spin.py --id 2 --power 40 --ramp-time 2.0 --timeout 2.5 --enable-plot 1 --cmd-rate 250meanwhile, i will fix the calibration script to also use the total board current for the plots. The current is not used in the actual calibration procedure, but it is good for checking to make sure things look ok and there are no glitches.
Since you are using VOXL2, however, the total current will also include the VOXL2 current, which will mean the plot of current won't be as smooth.
Alex
-
@rdjarvis I am sorry, i made a mistake, the FPV ESC (M0138) has total current sensing on ID2, so please use the following command:
./voxl-esc-spin.py --id 2 --power 40 --ramp-time 2.0 --timeout 2.5 --enable-plot 1 --cmd-rate 250meanwhile, i will fix the calibration script to also use the total board current for the plots. The current is not used in the actual calibration procedure, but it is good for checking to make sure things look ok and there are no glitches.
Since you are using VOXL2, however, the total current will also include the VOXL2 current, which will mean the plot of current won't be as smooth.
Alex
The change was pretty easy, i enabled the board current to be used as ESC current for the calibration plot purposes. the change is on
devbranch ofvoxl-esc: (commit) . so you can use that latest code for testing. -
The change was pretty easy, i enabled the board current to be used as ESC current for the calibration plot purposes. the change is on
devbranch ofvoxl-esc: (commit) . so you can use that latest code for testing. -
@Alex-Kushleyev wonderful, thank you, as always!
We will get to this as soon as we can for testing. Looking forward to the results.
RDJ
@rdjarvis, i found the correct motor 2850kV and just wanted to double check your propeller selection. 3in 3052 seems too small for this motor. Can you please confirm? Tmotor provides test data for 4in and 5in props for this motor : https://store.tmotor.com/product/f2203_5-fpv-motor.html . edit: they do also provide data for 3in (but 5 blade prop) - believe your propeller is tri-blade?
Either way is fine, just let me know and I will run the tests. I can start with the same params you did and see if i can reproduce the issue using FPV ESC. I have a 3076 propeller (tri-blade) which i can use for testing, which will be more aggressive than 3052 (i don't think i have 3052 available to test). I also have 3030.
Alex
-
@rdjarvis, i found the correct motor 2850kV and just wanted to double check your propeller selection. 3in 3052 seems too small for this motor. Can you please confirm? Tmotor provides test data for 4in and 5in props for this motor : https://store.tmotor.com/product/f2203_5-fpv-motor.html . edit: they do also provide data for 3in (but 5 blade prop) - believe your propeller is tri-blade?
Either way is fine, just let me know and I will run the tests. I can start with the same params you did and see if i can reproduce the issue using FPV ESC. I have a 3076 propeller (tri-blade) which i can use for testing, which will be more aggressive than 3052 (i don't think i have 3052 available to test). I also have 3030.
Alex
@Alex-Kushleyev thanks for digging up the motor.
The 3in tri-blade prop works well with this motor, for our use case. We have more aggressively pitched props as well. Please test and send those params! That would be great. This will eliminate tons of trouble shooting.
Thank you,
RDJ -
@Alex-Kushleyev thanks for digging up the motor.
The 3in tri-blade prop works well with this motor, for our use case. We have more aggressively pitched props as well. Please test and send those params! That would be great. This will eliminate tons of trouble shooting.
Thank you,
RDJ@rdjarvis , I loaded the same params that you were testing and I was able to reproduce the issue.
The issue is that the old spin-up procedure is not working well for this particular motor and the ESC incorrectly synchronized with the motor phases (de-sync), resulting in incorrect motor control and motor overheating.
We recommend using our new sinusoidal spin-up procedure which is a lot more reliable.
I will make a new parameter file for the Tmotor 2850kV motor with a 3076 propeller and share with you as well as resulting plots for your reference.
Alex
-
@rdjarvis , I loaded the same params that you were testing and I was able to reproduce the issue.
The issue is that the old spin-up procedure is not working well for this particular motor and the ESC incorrectly synchronized with the motor phases (de-sync), resulting in incorrect motor control and motor overheating.
We recommend using our new sinusoidal spin-up procedure which is a lot more reliable.
I will make a new parameter file for the Tmotor 2850kV motor with a 3076 propeller and share with you as well as resulting plots for your reference.
Alex
-
@Alex-Kushleyev Wonderful! Thank you for the hard work! Im happy you were able to reproduce. As you see, the motor heats up very early on the calibration cycle.
We are ready to test as soon as you can send those params!
Thank you,
RDJI have added the parameter file (here) . I used your exact motor and 3076 tri-blade propeller.
If you have slightly different propeller, all you should have to do is just run the calibration procedure (please use
voxl-esctools from main branch) , update the a0,a1,a2 params and upload the new esc param file to the ESC.I think this should perform pretty well, i did some aggressive testing (rpm step from 10k to 30k rpm), using the following command, and the results are very smooth. You can use this test and start with a lower step amplitude and make sure that works well and then increase the step size as you gain confidence. you should see smooth results like this, if you see any unusual spikes, let me know and send a plot.
#only test this with battery (not power supply) due to regenerative spikes ./voxl-esc-spin-step.py --id 2 --rpm 10000 --step-amplitude 20000 --timeout 3 --enable-plot 1 --cmd-rate 2000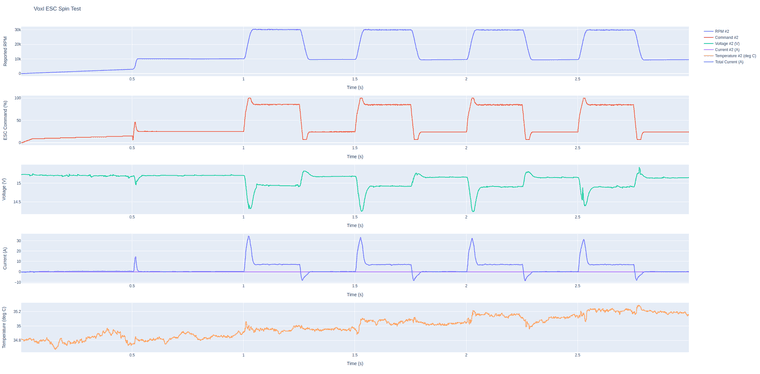
Please upload this param file, and run the calibration, you can also do the ramp test to 100% using
./voxl-esc-spin.py --id 2 --power 100 --ramp-time 2.0 --timeout 2.5 --enable-plot 1 --cmd-rate 250Produces the following results on my setup (very smooth):
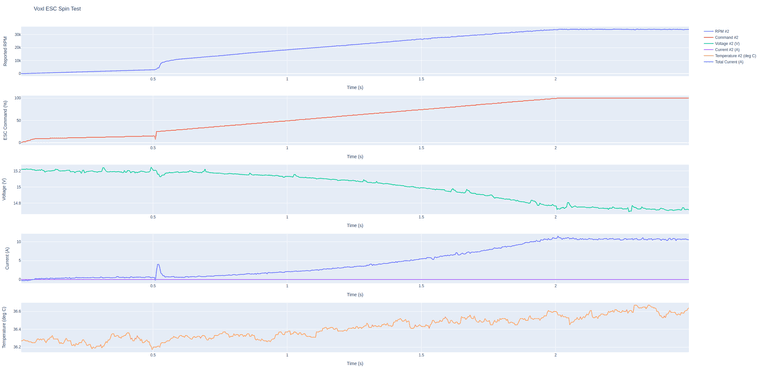
You can update your max rpm based on this result, but beware that max rpm is a function of voltage.
-
I have added the parameter file (here) . I used your exact motor and 3076 tri-blade propeller.
If you have slightly different propeller, all you should have to do is just run the calibration procedure (please use
voxl-esctools from main branch) , update the a0,a1,a2 params and upload the new esc param file to the ESC.I think this should perform pretty well, i did some aggressive testing (rpm step from 10k to 30k rpm), using the following command, and the results are very smooth. You can use this test and start with a lower step amplitude and make sure that works well and then increase the step size as you gain confidence. you should see smooth results like this, if you see any unusual spikes, let me know and send a plot.
#only test this with battery (not power supply) due to regenerative spikes ./voxl-esc-spin-step.py --id 2 --rpm 10000 --step-amplitude 20000 --timeout 3 --enable-plot 1 --cmd-rate 2000Please upload this param file, and run the calibration, you can also do the ramp test to 100% using
./voxl-esc-spin.py --id 2 --power 100 --ramp-time 2.0 --timeout 2.5 --enable-plot 1 --cmd-rate 250Produces the following results on my setup (very smooth):
You can update your max rpm based on this result, but beware that max rpm is a function of voltage.
-
I have added the parameter file (here) . I used your exact motor and 3076 tri-blade propeller.
If you have slightly different propeller, all you should have to do is just run the calibration procedure (please use
voxl-esctools from main branch) , update the a0,a1,a2 params and upload the new esc param file to the ESC.I think this should perform pretty well, i did some aggressive testing (rpm step from 10k to 30k rpm), using the following command, and the results are very smooth. You can use this test and start with a lower step amplitude and make sure that works well and then increase the step size as you gain confidence. you should see smooth results like this, if you see any unusual spikes, let me know and send a plot.
#only test this with battery (not power supply) due to regenerative spikes ./voxl-esc-spin-step.py --id 2 --rpm 10000 --step-amplitude 20000 --timeout 3 --enable-plot 1 --cmd-rate 2000Please upload this param file, and run the calibration, you can also do the ramp test to 100% using
./voxl-esc-spin.py --id 2 --power 100 --ramp-time 2.0 --timeout 2.5 --enable-plot 1 --cmd-rate 250Produces the following results on my setup (very smooth):
You can update your max rpm based on this result, but beware that max rpm is a function of voltage.
We ran the calibration script and failing to see where/which directory the html file is being stored. Could you point me to the location?
-
 B blue referenced this topic on
B blue referenced this topic on
-
We ran the calibration script and failing to see where/which directory the html file is being stored. Could you point me to the location?
@Alexander-Saunders , the file should be saved in the same directory where you are running the calibration script from (current directory). here is the line of code in the calibration script, which saves the figure right before trying to plot it in a browser.
-
@Alexander-Saunders , the file should be saved in the same directory where you are running the calibration script from (current directory). here is the line of code in the calibration script, which saves the figure right before trying to plot it in a browser.
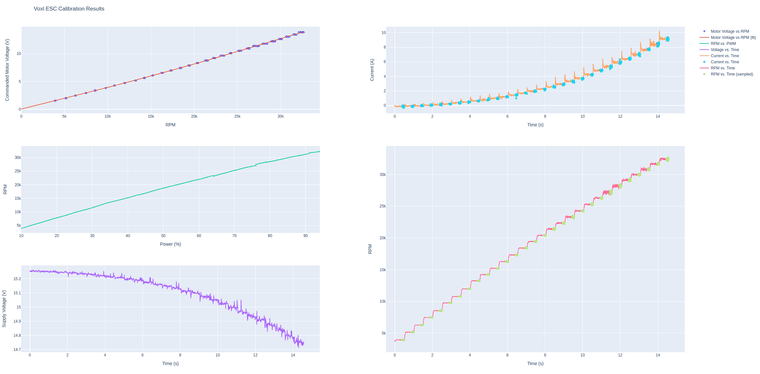
here is the calibration result i got with my setup (and the a0, a1, a2 params are already in the xml file i linked before):
-
here is the calibration result i got with my setup (and the a0, a1, a2 params are already in the xml file i linked before):
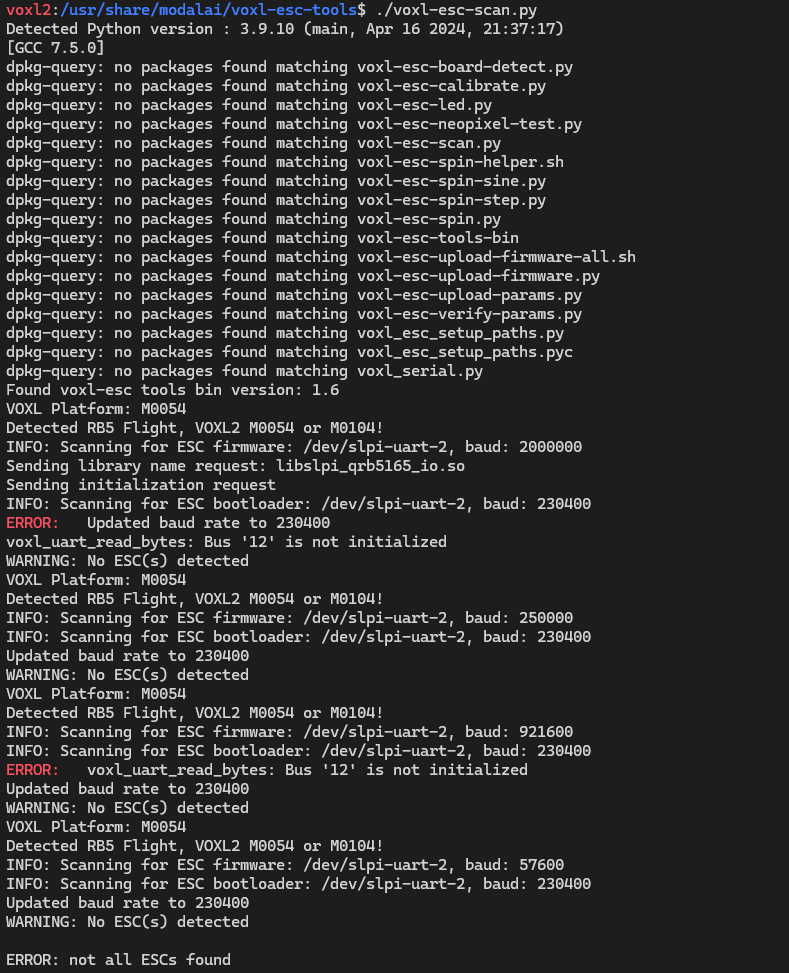
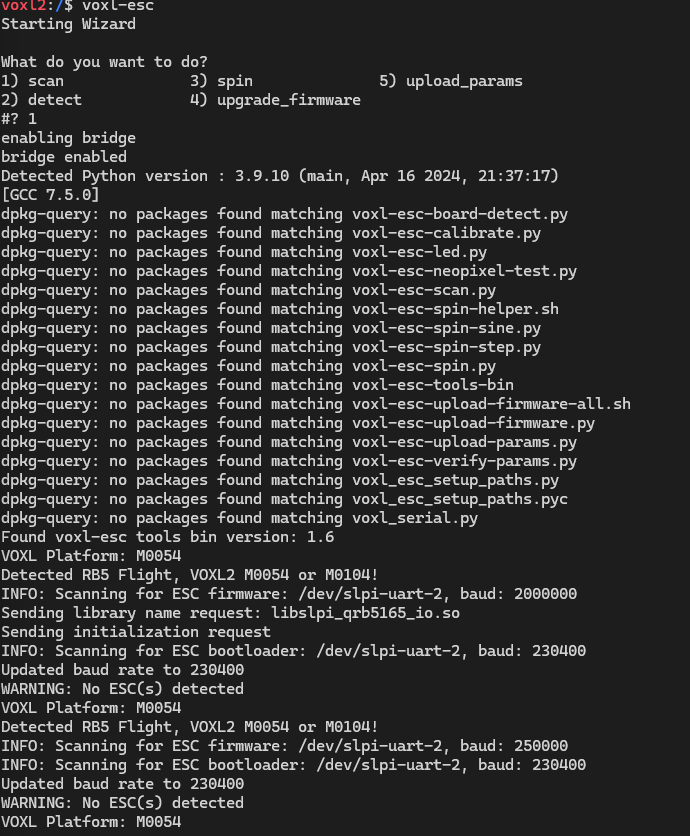
@Alex-Kushleyev after uploading the new params you sent the ESC no longer communicates with the VOXL2.
The ESC board is no longer recognized by VOXL2. All hardware is set up properly.
Screenshot 2024-04-17 110112.pngvoxl_uart_read_byte bus 12 is not initiated
Please point us in the right direction.
-
@Alex-Kushleyev after uploading the new params you sent the ESC no longer communicates with the VOXL2.
The ESC board is no longer recognized by VOXL2. All hardware is set up properly.
Screenshot 2024-04-17 110112.pngvoxl_uart_read_byte bus 12 is not initiated
Please point us in the right direction.
@rdjarvis , the latest params switched baud rate from 250k to 2mbit, but that should not be an issue. You should make sure voxl esc param in px4 is 20000000.
Please try voxl-esc python tools directly and make sure px4 is disabled when you run them (instead of running the voxl-esc wrapper like you did).
Sometimes stopping px4 gets the dsp in a weird state, in which case you can disable px4 from autostart, reboot and then do a voxl-esc-scan.py
-
@rdjarvis , the latest params switched baud rate from 250k to 2mbit, but that should not be an issue. You should make sure voxl esc param in px4 is 20000000.
Please try voxl-esc python tools directly and make sure px4 is disabled when you run them (instead of running the voxl-esc wrapper like you did).
Sometimes stopping px4 gets the dsp in a weird state, in which case you can disable px4 from autostart, reboot and then do a voxl-esc-scan.py
-
@rdjarvis , the latest params switched baud rate from 250k to 2mbit, but that should not be an issue. You should make sure voxl esc param in px4 is 20000000.
Please try voxl-esc python tools directly and make sure px4 is disabled when you run them (instead of running the voxl-esc wrapper like you did).
Sometimes stopping px4 gets the dsp in a weird state, in which case you can disable px4 from autostart, reboot and then do a voxl-esc-scan.py
For the esc tools, we were running the commands from /usr/share/modalai/voxl-esc-tools. To clarify, for the baud rate changes, do you want 2,000,000 or 20,000,000. We will try the tools again and confirm px4 is stopped via systemctl stop voxl-px4.
-
For the esc tools, we were running the commands from /usr/share/modalai/voxl-esc-tools. To clarify, for the baud rate changes, do you want 2,000,000 or 20,000,000. We will try the tools again and confirm px4 is stopped via systemctl stop voxl-px4.
@Alexander-Saunders, my bad too many zeros. 2,000,000 (2Mbit)
-
@Alexander-Saunders, my bad too many zeros. 2,000,000 (2Mbit)
The screen shot in earlier post today shows running “voxl-esc” which is a wrapper for the python tools, sometimes it is easier just to use python tools directly, but make sure they are latest version. the version in /usr/share/modalai is probably not latest. Normally you dont need to update the tools but if something is not working as expected, it is good to try the latest.
-
The screen shot in earlier post today shows running “voxl-esc” which is a wrapper for the python tools, sometimes it is easier just to use python tools directly, but make sure they are latest version. the version in /usr/share/modalai is probably not latest. Normally you dont need to update the tools but if something is not working as expected, it is good to try the latest.
{kind=link}
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login