Tracking camera calibration not progressing
-
Hello, I tried to calibrate the tracking camera using a 4x7 checkerboard with side lengths of 4 cm. I launched voxl-portal to view the camera calibration overlay. Then I placed the checkerboard in various positions and orientations within the red box overlayed on the tracking camera image. However, the calibration process does not progress. I never receive a green (overlay) box and the process remains at 0%.
What should I do to solve this issue?
Command used:
voxl-calibrate-camera tracking -f -l 0.04 -s 4x7I followed the calibrate camera instructions from here: https://docs.modalai.com/calibrate-cameras/.
-
Hello, I tried to calibrate the tracking camera using a 4x7 checkerboard with side lengths of 4 cm. I launched voxl-portal to view the camera calibration overlay. Then I placed the checkerboard in various positions and orientations within the red box overlayed on the tracking camera image. However, the calibration process does not progress. I never receive a green (overlay) box and the process remains at 0%.
What should I do to solve this issue?
Command used:
voxl-calibrate-camera tracking -f -l 0.04 -s 4x7I followed the calibrate camera instructions from here: https://docs.modalai.com/calibrate-cameras/.
-
@Troi same issue here but with stereo camera and command:
voxl-calibrate-camera stereo_front -s 6x9 -l 0.030Did you resolve this?
@plub ,
Can you provide any more details? Are you able to start the camera calibration and view the camera images using
voxl-portal?Are you sure that you are using a correct type of the checkerboard (correct number of corners)?
Alex
-
@plub ,
Can you provide any more details? Are you able to start the camera calibration and view the camera images using
voxl-portal?Are you sure that you are using a correct type of the checkerboard (correct number of corners)?
Alex
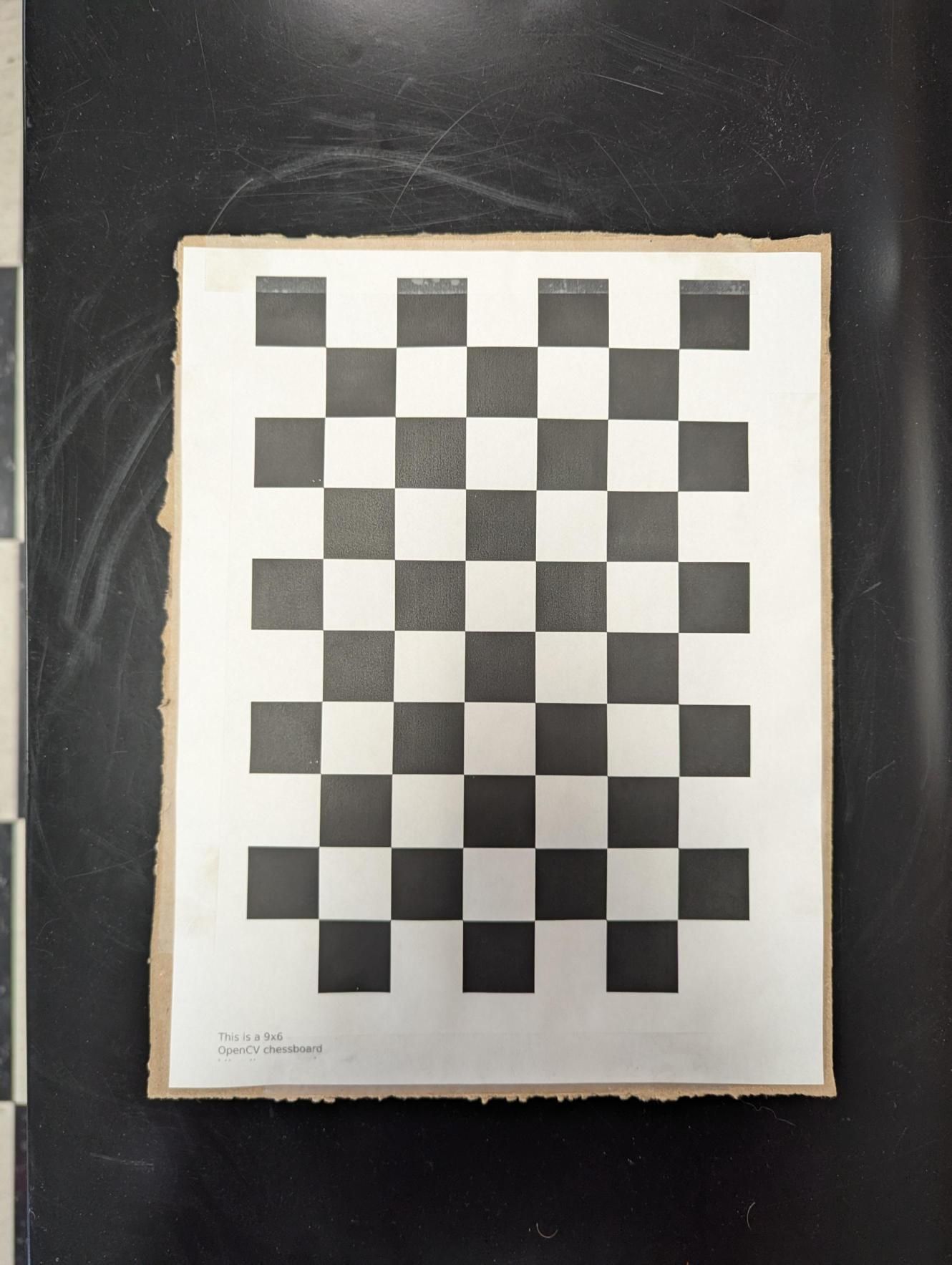
@Alex-Kushleyev What do you mean by "start" the camera calibration? I've used command which i have pasted in previous post. Then i was able to see camera calibrator tool and images from stereo cameras. Red rectangles showed up but when i placed the chessboard inside them, nothings happened. I am using checkerboard recommended by you: 9x6 OpenCV chessboard. I've tried various combinations in front of the camera but calibration didn't started.
thanks for trying to help
Piotr
-
@Alex-Kushleyev What do you mean by "start" the camera calibration? I've used command which i have pasted in previous post. Then i was able to see camera calibrator tool and images from stereo cameras. Red rectangles showed up but when i placed the chessboard inside them, nothings happened. I am using checkerboard recommended by you: 9x6 OpenCV chessboard. I've tried various combinations in front of the camera but calibration didn't started.
thanks for trying to help
Piotr
@plub , sorry for the delay. By start the calibration, I meant launch the
voxl-calibrate-cameraapp and view the calibration stream via voxl-portal (it seems you have it working).Is it possible for you to paste a video of a screen recording while you are doing the calibration (screen record the voxl-portal stream).
Thank you
Alex
-
@plub , sorry for the delay. By start the calibration, I meant launch the
voxl-calibrate-cameraapp and view the calibration stream via voxl-portal (it seems you have it working).Is it possible for you to paste a video of a screen recording while you are doing the calibration (screen record the voxl-portal stream).
Thank you
Alex
@Alex-Kushleyev Thanks. Now calibration is starting. Solution is to use 5x6 checkerboard with trimmed in half squares on edges. But even we can do full calibration, it says failed in the end. Re-projection error for stereo calibration ( standalone cameras calibrate fine ) is very high. Any solutions for this?
-
@Alex-Kushleyev Thanks. Now calibration is starting. Solution is to use 5x6 checkerboard with trimmed in half squares on edges. But even we can do full calibration, it says failed in the end. Re-projection error for stereo calibration ( standalone cameras calibrate fine ) is very high. Any solutions for this?
@plub , could you please clarify which cameras you are using in the stereo configuration? OV7251?
If the larger pattern was still detected by the procedure but was not accepted as a sample, this means that the pattern took up too little space of the desired area. You need to fill the desired area in each step almost completely, so that the sample is accepted.
Also, is your checkerboard printed on paper and attached to a very flat surface without wrinkles? A poor calibration pattern can lead to poor results.
Can you please post the result of the calibration? intrinsic and extrinsic parameters that are generated by the calibration procedure, even though it fails. Also please share the reprojection errors.
Alex
-
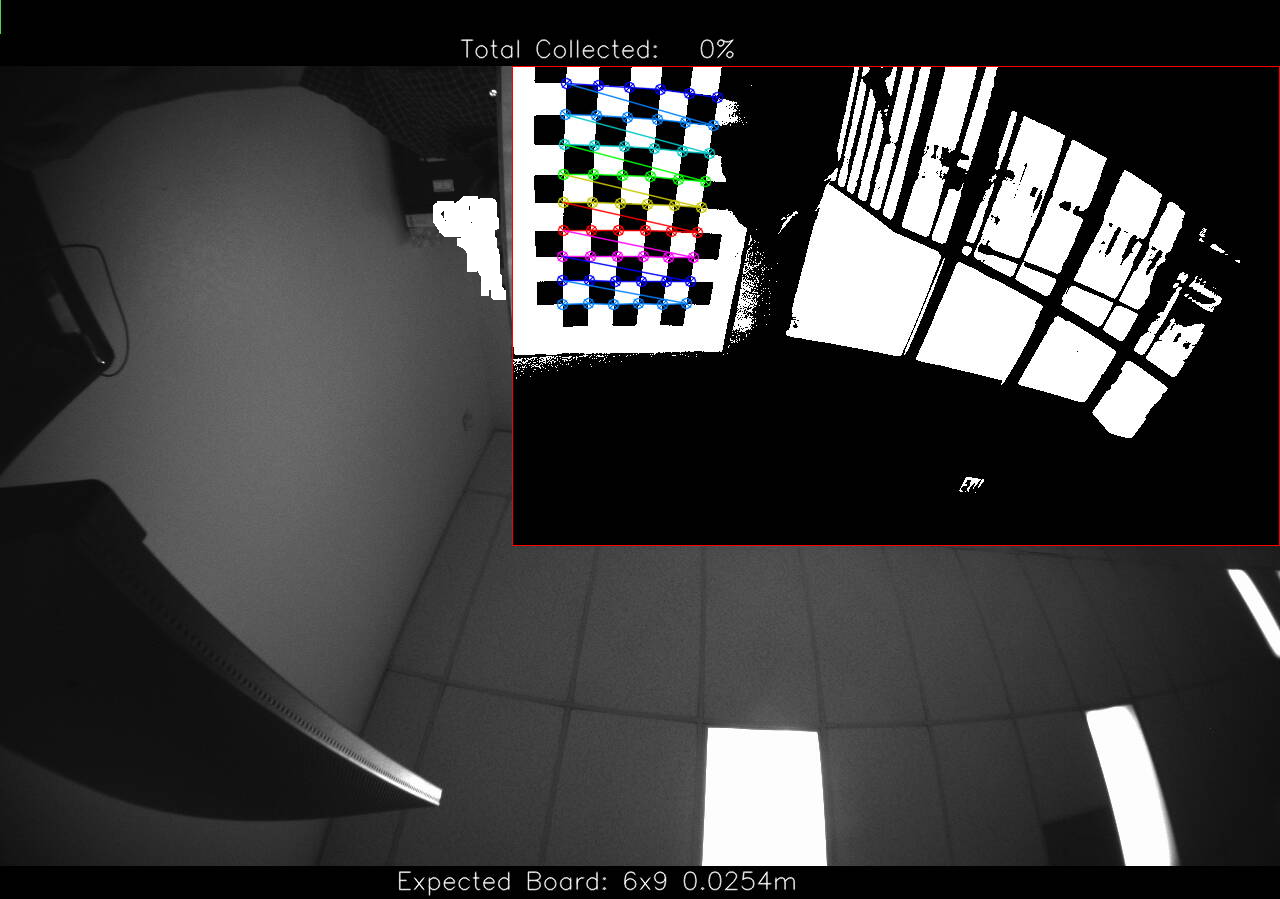
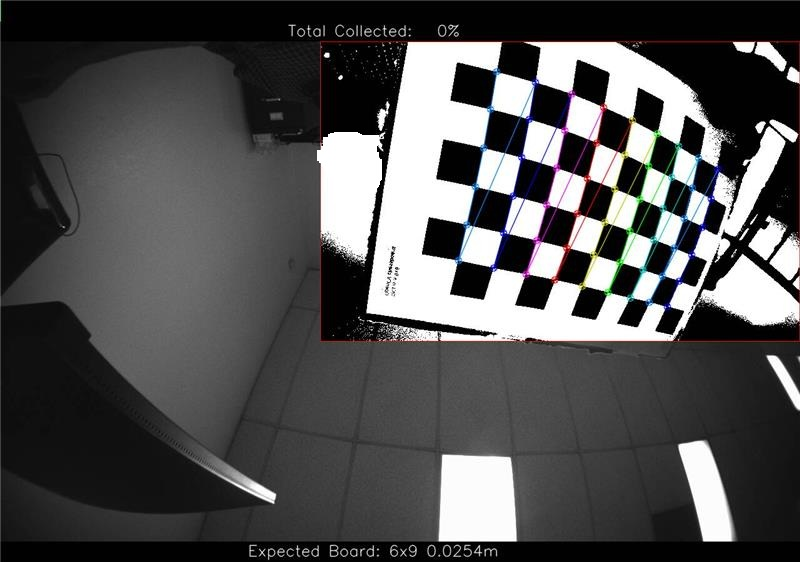
Hello, I'm having the same issue with the dual AR0144 1 MP tracking image sensors not progressing in the calibration sequence. I see some dark obscurations in the tracking rectangle and I am able to see the corners being counted but the calibration sequence never progresses.
voxl2:~$ voxl-calibrate-camera tracking_down -s 6x9 -l 0.0254 -d
Waiting for valid pipe...
Please open voxl-portal in a web browser to view the camera calibrator overlay stream
^C
received SIGINT Ctrl-C
done sampling
Exiting Cleanly
waiting to join consumer thread -
Hello, I'm having the same issue with the dual AR0144 1 MP tracking image sensors not progressing in the calibration sequence. I see some dark obscurations in the tracking rectangle and I am able to see the corners being counted but the calibration sequence never progresses.
voxl2:~$ voxl-calibrate-camera tracking_down -s 6x9 -l 0.0254 -d
Waiting for valid pipe...
Please open voxl-portal in a web browser to view the camera calibrator overlay stream
^C
received SIGINT Ctrl-C
done sampling
Exiting Cleanly
waiting to join consumer threadHello @KnightHawk06,
This can happen because of lens shading on the AR0144 camera lens causing the thresholding (in camera calibration app) to not work as expected.
Depending on the version of VOXL2 SDK you are using, there may be also
tracking_down_misp_greycamera stream available, which is the lens shading compensated output for this camera. I believe it should work better for calibration purposes.Can you please try? If that does not help, I can suggest a few other tweaks, but those will require rebuilding the
voxl-camera-calibrationapp.Alex
-
Hello, I'm having the same issue with the dual AR0144 1 MP tracking image sensors not progressing in the calibration sequence. I see some dark obscurations in the tracking rectangle and I am able to see the corners being counted but the calibration sequence never progresses.
voxl2:~$ voxl-calibrate-camera tracking_down -s 6x9 -l 0.0254 -d
Waiting for valid pipe...
Please open voxl-portal in a web browser to view the camera calibrator overlay stream
^C
received SIGINT Ctrl-C
done sampling
Exiting Cleanly
waiting to join consumer thread -
Hello @KnightHawk06,
This can happen because of lens shading on the AR0144 camera lens causing the thresholding (in camera calibration app) to not work as expected.
Depending on the version of VOXL2 SDK you are using, there may be also
tracking_down_misp_greycamera stream available, which is the lens shading compensated output for this camera. I believe it should work better for calibration purposes.Can you please try? If that does not help, I can suggest a few other tweaks, but those will require rebuilding the
voxl-camera-calibrationapp.Alex
Thanks for the suggestion. I have en_misp enabled and I can see the misp_grey view in the voxl-portal, How do I command voxl-calibrate-camera to use the misp_grey view?
──────────────────────────────────────────────────────────────────────────────── system-image: 1.8.02-M0054-14.1a-perf kernel: #1 SMP PREEMPT Mon Nov 11 22:47:44 UTC 2024 4.19.125 ──────────────────────────────────────────────────────────────────────────────── hw platform: M0054 mach.var: 1.0.1 ──────────────────────────────────────────────────────────────────────────────── voxl-suite: 1.4.3 ────────────────────────────────────────────────────────────────────────────────{ "type": "ar0144", "name": "tracking_down", "enabled": true, "camera_id": 3, "fps": 30, "en_rotate": false, "en_preview": true, "preview_width": 1280, "preview_height": 800, "en_raw_preview": true, "en_misp": true, "misp_width": 1280, "misp_height": 800, "misp_venc_enable": false, "misp_venc_mode": "h264", "misp_venc_br_ctrl": "cqp", "misp_venc_Qfixed": 30, "misp_venc_Qmin": 15, "misp_venc_Qmax": 50, "misp_venc_nPframes": 29, "misp_venc_mbps": 2, "misp_venc_osd": false, "misp_awb": "auto", "misp_gamma": 1, "ae_mode": "lme_msv", "gain_min": 54, "gain_max": 8000, "ae_desired_msv": 60, "exposure_min_us": 20, "exposure_max_us": 12000, "exposure_soft_min_us": 5000, "ae_filter_alpha": 0.600000023841858, "ae_ignore_fraction": 0.20000000298023224, "ae_slope": 0.05000000074505806, "ae_exposure_period": 1, "ae_gain_period": 1 } -
Thanks for the suggestion. I have en_misp enabled and I can see the misp_grey view in the voxl-portal, How do I command voxl-calibrate-camera to use the misp_grey view?
──────────────────────────────────────────────────────────────────────────────── system-image: 1.8.02-M0054-14.1a-perf kernel: #1 SMP PREEMPT Mon Nov 11 22:47:44 UTC 2024 4.19.125 ──────────────────────────────────────────────────────────────────────────────── hw platform: M0054 mach.var: 1.0.1 ──────────────────────────────────────────────────────────────────────────────── voxl-suite: 1.4.3 ────────────────────────────────────────────────────────────────────────────────{ "type": "ar0144", "name": "tracking_down", "enabled": true, "camera_id": 3, "fps": 30, "en_rotate": false, "en_preview": true, "preview_width": 1280, "preview_height": 800, "en_raw_preview": true, "en_misp": true, "misp_width": 1280, "misp_height": 800, "misp_venc_enable": false, "misp_venc_mode": "h264", "misp_venc_br_ctrl": "cqp", "misp_venc_Qfixed": 30, "misp_venc_Qmin": 15, "misp_venc_Qmax": 50, "misp_venc_nPframes": 29, "misp_venc_mbps": 2, "misp_venc_osd": false, "misp_awb": "auto", "misp_gamma": 1, "ae_mode": "lme_msv", "gain_min": 54, "gain_max": 8000, "ae_desired_msv": 60, "exposure_min_us": 20, "exposure_max_us": 12000, "exposure_soft_min_us": 5000, "ae_filter_alpha": 0.600000023841858, "ae_ignore_fraction": 0.20000000298023224, "ae_slope": 0.05000000074505806, "ae_exposure_period": 1, "ae_gain_period": 1 }@KnightHawk06 , use voxl-calibrare-camera tracking_down_misp_grey <remaining options>
-
@KnightHawk06 , use voxl-calibrare-camera tracking_down_misp_grey <remaining options>
@Alex-Kushleyev Thanks! I was able to get to the 2nd calibration panel with the command below but the process became unresponsive a couple times and I had to reboot, I eventually was able to detect the corners in the 2nd panel but am unable to progress.
voxl-calibrate-camera tracking_down_misp_grey -f -s 6x9 -l 0.0254
-
@Alex-Kushleyev Thanks! I was able to get to the 2nd calibration panel with the command below but the process became unresponsive a couple times and I had to reboot, I eventually was able to detect the corners in the 2nd panel but am unable to progress.
voxl-calibrate-camera tracking_down_misp_grey -f -s 6x9 -l 0.0254
@KnightHawk06 , thanks for the details. I am not aware of the calibration app becoming unresponsive - do you have any details about that (at which point did it become unresponsive?). Any info you have on this would help. thank you!
Alex
-
@KnightHawk06 , thanks for the details. I am not aware of the calibration app becoming unresponsive - do you have any details about that (at which point did it become unresponsive?). Any info you have on this would help. thank you!
Alex
@Alex-Kushleyev The calibration image froze and I was unable to view any camera data in the VOXL portal, I also was unable to ping the device from my desktop until rebooting the device.
I'm still unable to complete the calibration process, are there any logs that I can review to see what's happening? Any other ideas of how I can proceed?
-
@Alex-Kushleyev The calibration image froze and I was unable to view any camera data in the VOXL portal, I also was unable to ping the device from my desktop until rebooting the device.
I'm still unable to complete the calibration process, are there any logs that I can review to see what's happening? Any other ideas of how I can proceed?
@Alex-Kushleyev You had mentioned there are some other things to try that will require rebuilding the voxl-camera-calibration app? I tried increasing ae_desired_msv and misp_gamma to help with the lens shading but I was not able to progress any further through calibration.
-
@KnightHawk06 , thanks for the details. I am not aware of the calibration app becoming unresponsive - do you have any details about that (at which point did it become unresponsive?). Any info you have on this would help. thank you!
Alex
@Alex-Kushleyev Here is some more information on the calibration process freezing, the camera feed stops updating in the voxl portal.

-
@Alex-Kushleyev Here is some more information on the calibration process freezing, the camera feed stops updating in the voxl portal.
@KnightHawk06 , Please try building the calibration app from this branch : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-camera-calibration/-/tree/fisheye-stereo?ref_type=heads
Some time ago i fixed it up to work with fisheye stereo calibration, but also changed one parameter in thresholding to make it more smooth : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-camera-calibration/-/commit/0bce9a25c67e64a229cfcbad4b6ace3a5837ee1b#f221083d30a7ca966318f904682ecf4970341657 -- in threshold.cpp change the number of tiles from 3 to 5, so that the image thresholding is more smooth across the image (even a larger number like 7 should work even better, but i am not sure if i tried).
In the same branch I also slightly reduced the percentage of the windows that needs to be filled up with the checkerboard pattern, so that it is easier to have the calibration accept the pattern.
Another thing to try, to just reduce the cpu load, just temporarily drop the FPS to 15, so that there are not so many frames to process (you can change it in voxl-camera-server.conf)
I am going to take a look again at this soon and potentially integrate these fixes as options to camera calibration app (number of tiles, frame skip, etc)
Alex
-
@KnightHawk06 , Please try building the calibration app from this branch : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-camera-calibration/-/tree/fisheye-stereo?ref_type=heads
Some time ago i fixed it up to work with fisheye stereo calibration, but also changed one parameter in thresholding to make it more smooth : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-camera-calibration/-/commit/0bce9a25c67e64a229cfcbad4b6ace3a5837ee1b#f221083d30a7ca966318f904682ecf4970341657 -- in threshold.cpp change the number of tiles from 3 to 5, so that the image thresholding is more smooth across the image (even a larger number like 7 should work even better, but i am not sure if i tried).
In the same branch I also slightly reduced the percentage of the windows that needs to be filled up with the checkerboard pattern, so that it is easier to have the calibration accept the pattern.
Another thing to try, to just reduce the cpu load, just temporarily drop the FPS to 15, so that there are not so many frames to process (you can change it in voxl-camera-server.conf)
I am going to take a look again at this soon and potentially integrate these fixes as options to camera calibration app (number of tiles, frame skip, etc)
Alex
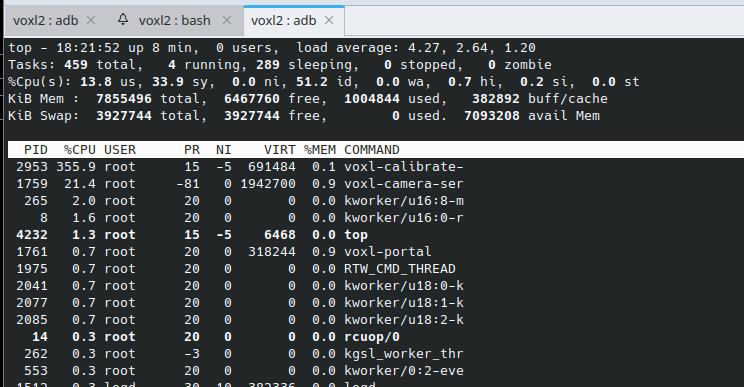
@Alex-Kushleyev Thanks, this is very helpful. I checked out the fisheye-stereo branch and built and deployed it to the voxl2. I tried both 5 and 7 max tiles and also decreased fps to 15. The image is freezing less often during calibration and it is successfully counting the corners but does not progress past 0%. The 2 cameras are 4.5 cm apart, is that ok? Are there any debug logs that I can turn on to inspect why the calibration is not moving forward?
~/git/voxl-camera-calibration$ ./deploy_to_voxl.sh
searching for ADB device
checking VOXL for dpkg/opkg
dpkg detected
voxl-camera-calibration_0.5.9_arm64.deb: 1 file pushed, 0 skipped. 417.9 MB/s (177172 bytes in 0.000s)
(Reading database ... 105707 files and directories currently installed.)
Preparing to unpack .../voxl-camera-calibration_0.5.9_arm64.deb ...
Unpacking voxl-camera-calibration (0.5.9) over (0.5.9) ...
Setting up voxl-camera-calibration (0.5.9) ...
Postinst script completed.
DONE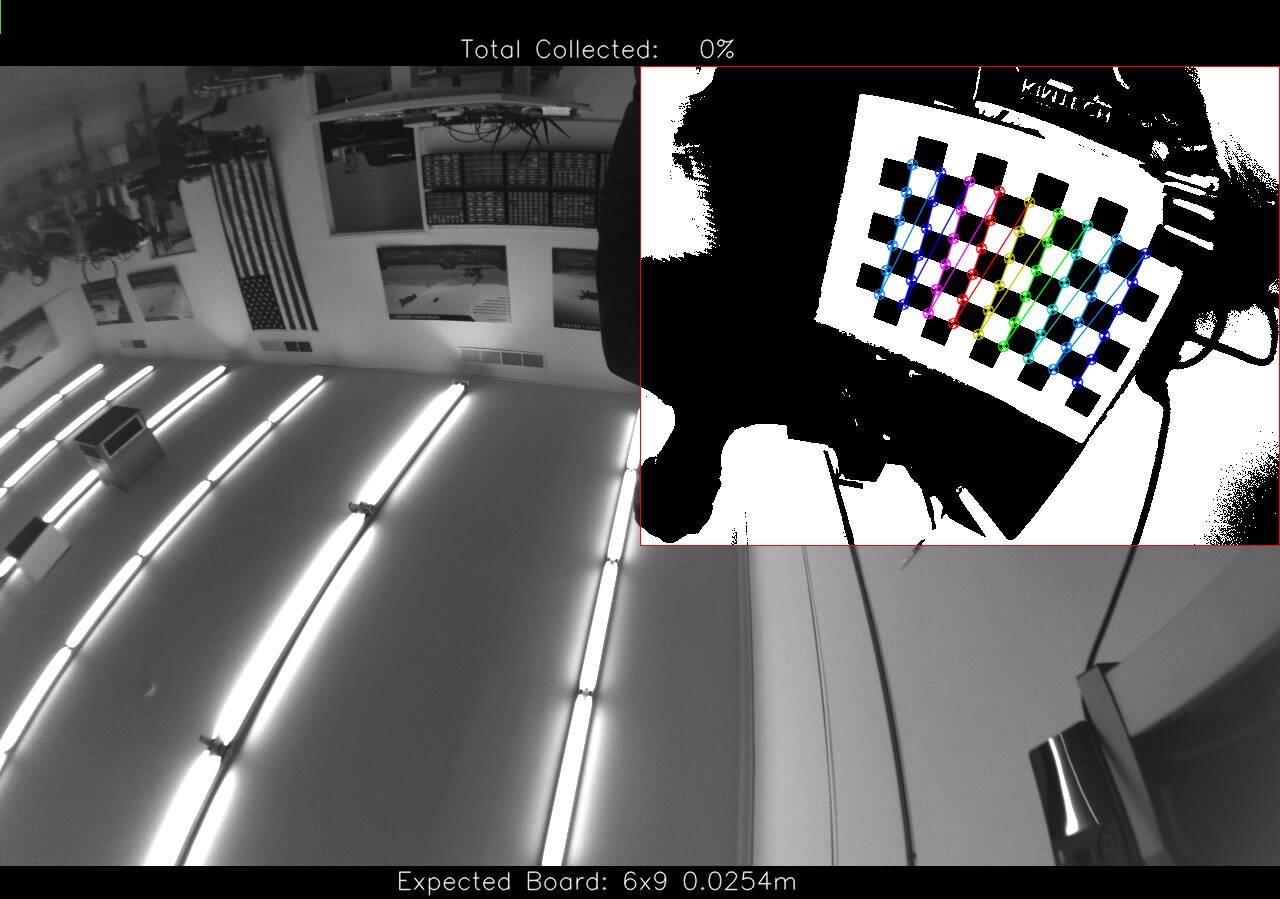
-
@Alex-Kushleyev Thanks, this is very helpful. I checked out the fisheye-stereo branch and built and deployed it to the voxl2. I tried both 5 and 7 max tiles and also decreased fps to 15. The image is freezing less often during calibration and it is successfully counting the corners but does not progress past 0%. The 2 cameras are 4.5 cm apart, is that ok? Are there any debug logs that I can turn on to inspect why the calibration is not moving forward?
~/git/voxl-camera-calibration$ ./deploy_to_voxl.sh
searching for ADB device
checking VOXL for dpkg/opkg
dpkg detected
voxl-camera-calibration_0.5.9_arm64.deb: 1 file pushed, 0 skipped. 417.9 MB/s (177172 bytes in 0.000s)
(Reading database ... 105707 files and directories currently installed.)
Preparing to unpack .../voxl-camera-calibration_0.5.9_arm64.deb ...
Unpacking voxl-camera-calibration (0.5.9) over (0.5.9) ...
Setting up voxl-camera-calibration (0.5.9) ...
Postinst script completed.
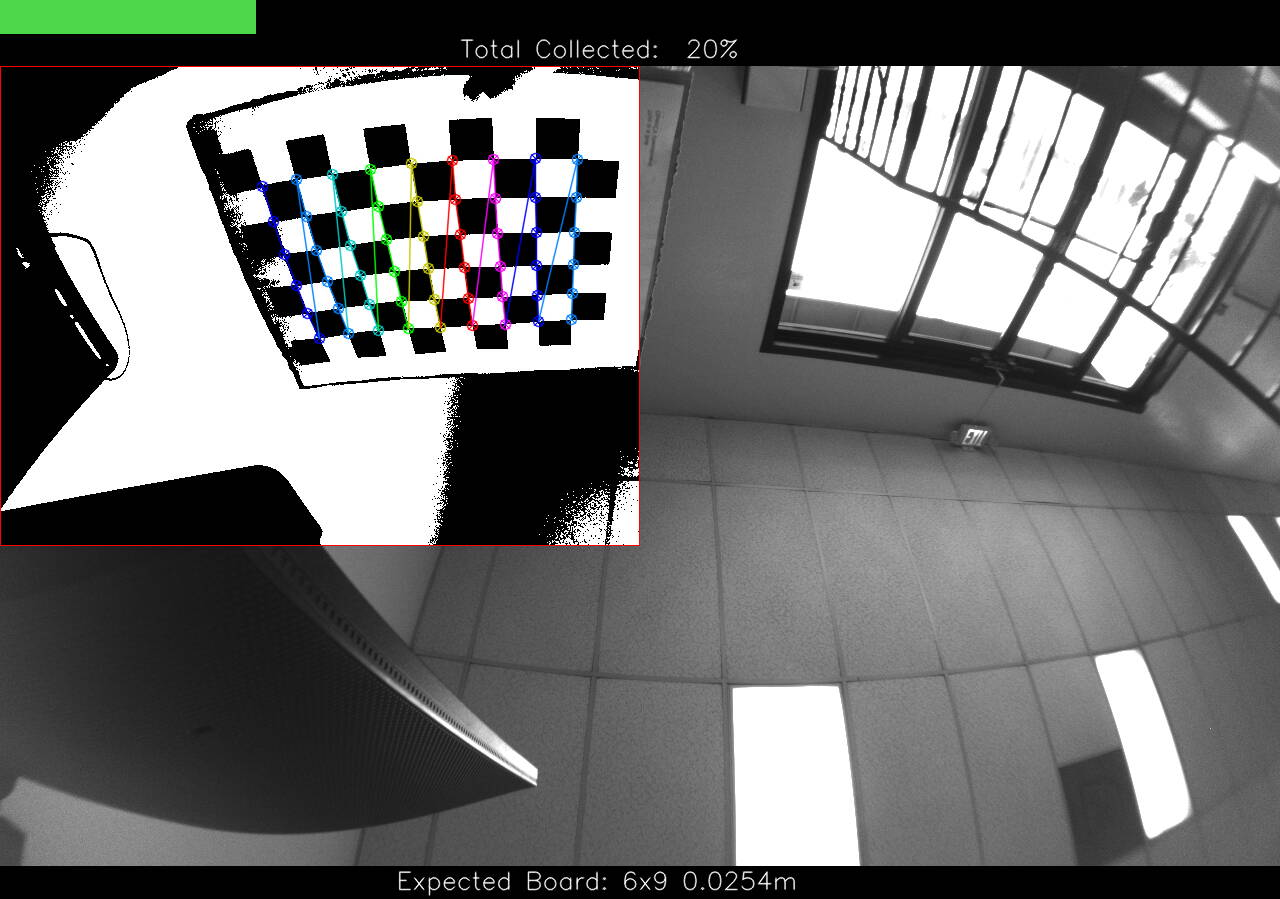
DONEOh i understand now.. The red box in the overlay defines the region where you need the calibration pattern to be located, HOWEVER there is also a requirement for the area within that red box that the pattern must fill. So, in your case, the detected pattern is too small within the red box, so you need to bring the pattern closer to the camera.
In calibrator.cpp, look for the following:
//Each item represents a desired square in percentages of the image {x1,y1,x2,y2, fill threshold, #samples} from top leftOn that fisheye stereo branch i lowered the thresholds for Fisheye patterns, but not FisheyeWide patterns, so you are still having issues (after trying to bring the pattern closer), you would want to slightly lower the fill thresholds here : https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-camera-calibration/-/blob/0bce9a25c67e64a229cfcbad4b6ace3a5837ee1b/src/calibrator.cpp#L272 (maybe from 40 to 35 and from 45 to 30).
Alex
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login