Questions regarding RB5 5G drone
-
@Eric-Katzfey
Yes...any ideas what to do now? Thanks!@MJ What do you get when you enter
ps aux | grep sscorps aux | grep sensor? -
@Eric-Katzfey
Yes...any ideas what to do now? Thanks!@MJ Can your reflash the system image? https://docs.modalai.com/Qualcomm-Flight-RB5-system-image/. It will delete everything on your board so backup any important data before doing this. If
ssc_sensor_infodoesn't report all of the sensors then px4 will never work as it relies on that ability. -
@MJ What do you get when you enter
ps aux | grep sscorps aux | grep sensor?sh-4.4# ps aux | grep ssc system 1273 1.0 0.0 2068 1260 ? Ss 20:16 0:02 /usr/bin/sscrpcd sensorspd root 3764 0.0 0.0 2708 648 pts/0 S<+ 20:20 0:00 grep ssc sh-4.4# sh-4.4# ps aux | grep sensor system 1273 0.9 0.0 2068 1260 ? Ss 20:16 0:02 /usr/bin/sscrpcd sensorspd sensors 1281 0.0 0.0 186552 5896 ? Ssl 20:16 0:00 /usr/bin/sensors.qti root 4196 0.0 0.0 2708 620 pts/0 S<+ 20:21 0:00 grep sensor sh-4.4# -
@MJ Can your reflash the system image? https://docs.modalai.com/Qualcomm-Flight-RB5-system-image/. It will delete everything on your board so backup any important data before doing this. If
ssc_sensor_infodoesn't report all of the sensors then px4 will never work as it relies on that ability.@Eric-Katzfey
Will try to re-flash within a day or two, so I'll get back to you with the updates. -
@MJ Can your reflash the system image? https://docs.modalai.com/Qualcomm-Flight-RB5-system-image/. It will delete everything on your board so backup any important data before doing this. If
ssc_sensor_infodoesn't report all of the sensors then px4 will never work as it relies on that ability.This post is deleted! -
Re-flash solved all the previous issues.
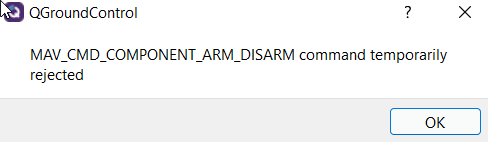
But still I'm unable to arm the unit.
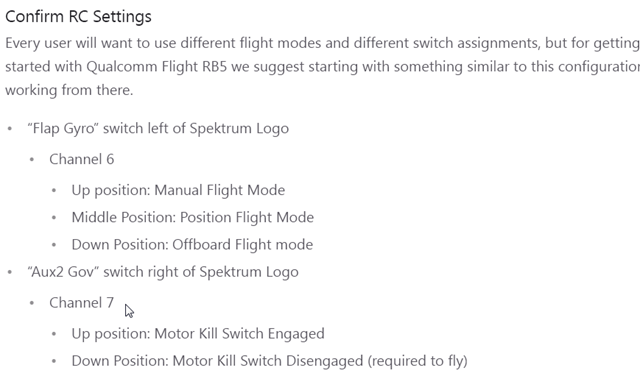
Following instruction provided here
https://docs.modalai.com/Qualcomm-Flight-RB5-user-guide-first-flight/
doesn't help as I receive GPS and AHRS errors (while the unit is placed under open and clear sky).
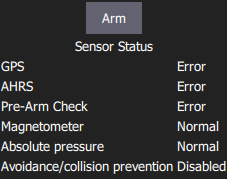
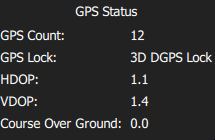
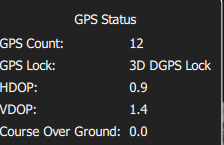
Regarding the GPS, I receive the "GPS accuracy too low" (while receiving 10-12 satellites).
What could be the cause of these errors?
Also is the GPS necessary to at least test the motors?
Is it possible to fly without the GPS? -
Hi @MJ ,
Check to see if you have your outdoor parameters correctly set: https://gitlab.com/voxl-public/flight-core-px4/px4-parameters/-/tree/master/helpers/rb5
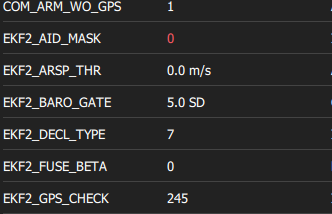
Sometimes the ekf2 aid mask is still set to 280.
You can arm the drone without GPS by setting COM_ARM_WO_GPS to 1.
-
Also, are the GPS LEDs illuminating? There should be the main one which should go from blue to green when it's ready. And a small one flashing on the side that shows a GPS lock.
-
Also, are the GPS LEDs illuminating? There should be the main one which should go from blue to green when it's ready. And a small one flashing on the side that shows a GPS lock.
@RichieRich
I have made following changes (WO_GPS to 1 and EFK2_AID_MASK to 1 and to 0)
but now I receive following error:

The main GPS LED (blue) slowly blinks, but only in blue color.
The FIX LED has short blinks in blue color.Could you please advise what to do?
-
Also when I go to QGC - Vehicle setup - Safety, I get this error
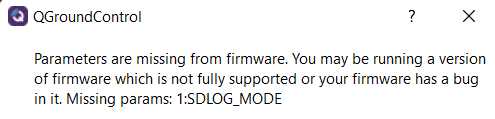
-
When EFK2_AID_MASK is set to 1, following errors occur:

I emphasize that drone is under clear and sunny sky
-
Also, are the GPS LEDs illuminating? There should be the main one which should go from blue to green when it's ready. And a small one flashing on the side that shows a GPS lock.
@RichieRich
Are there any updates or suggestions regarding above mentioned issues? Thanks! -
EKF2_AID_MASK should be set to 1 for GPS.
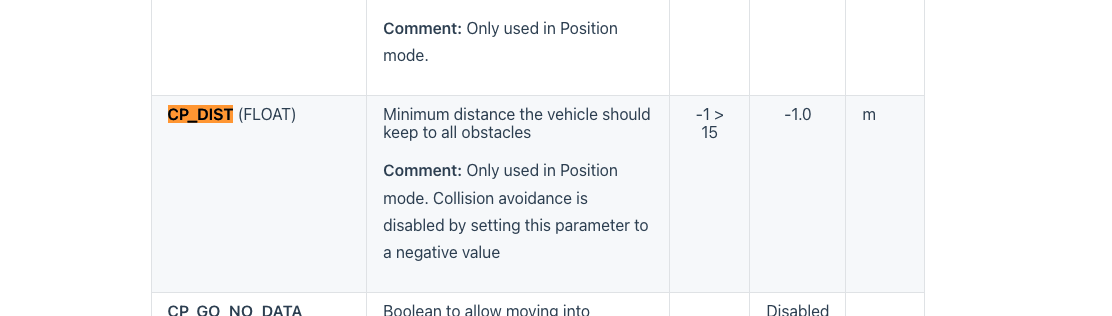
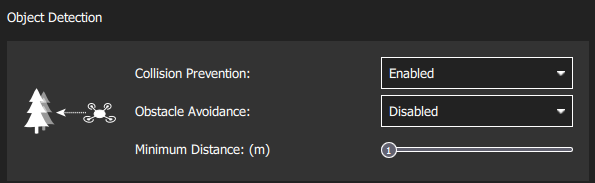
Have you set CP_DIST > 0? From the warning, it looks like you have the avoidance system on and it may be seeing something.
How are you mounting the GPS unit? Just an un-modified RB5 with mast? I assume you're outdoors with a clear view of the sky. In some cases, interference will throw that error. Setting COM_ARM_WO_GPS will always allow you to arm despite GPS errors. If you still can't arm, there's usualy another issue, maybe as stated above that the obstacle avoidance system is enabled. Another place to check is in QGC under safeties to ensure the avoidance system is disabled.
Againg for the GPS< Flashing blue, means it's still waiting for the GPS to be fully ready. Small blue LED on the side will flash blue showing a lock.
You can also try opening up the GPS check values or disabling some checks. For instance you can open up ekf2_req_sacc from 0.5 to about 0.75.
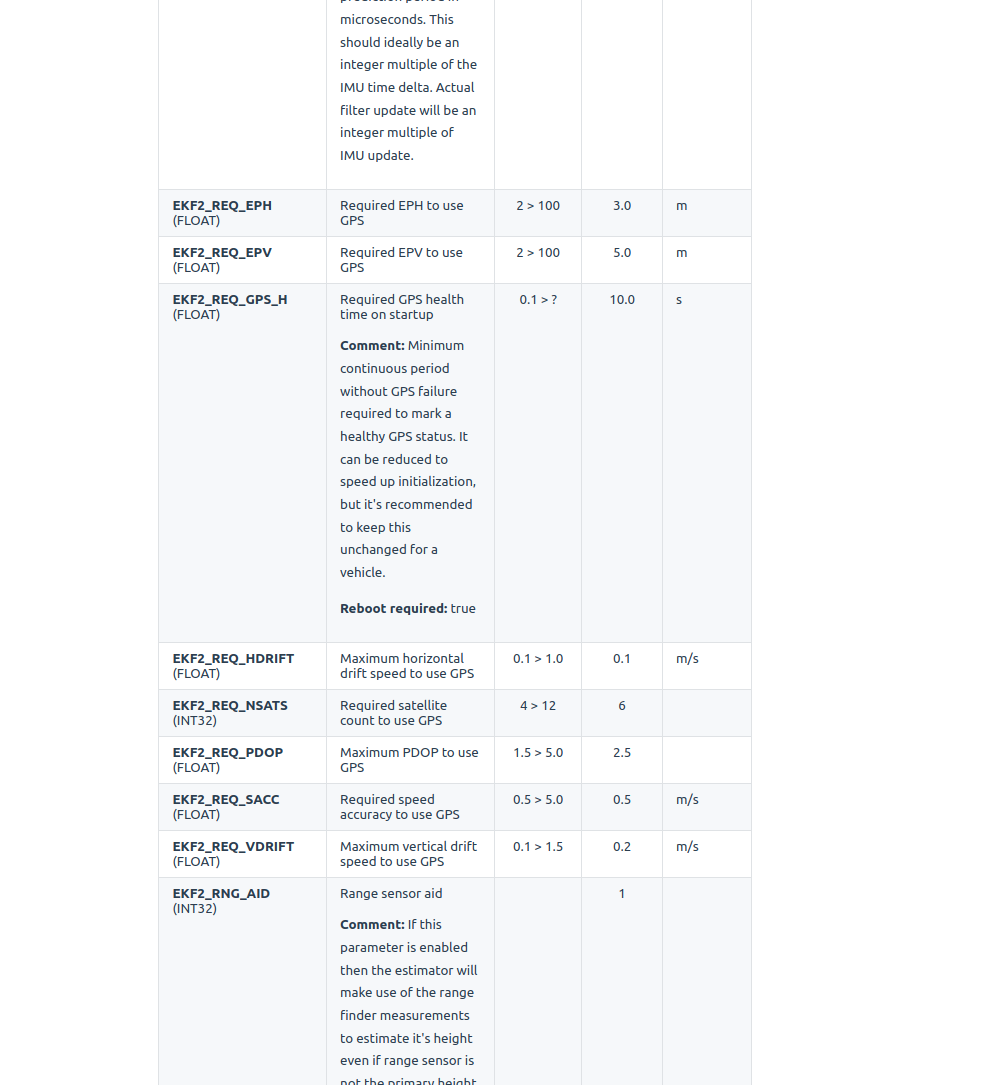
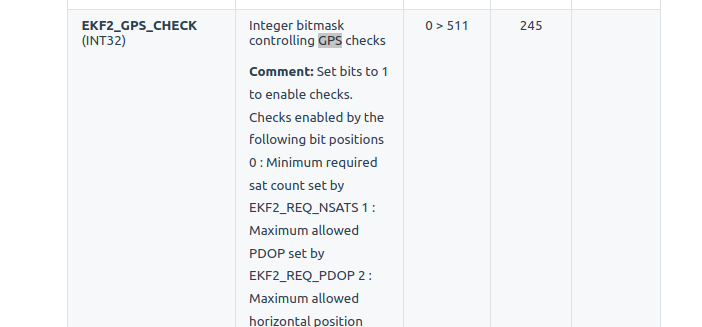
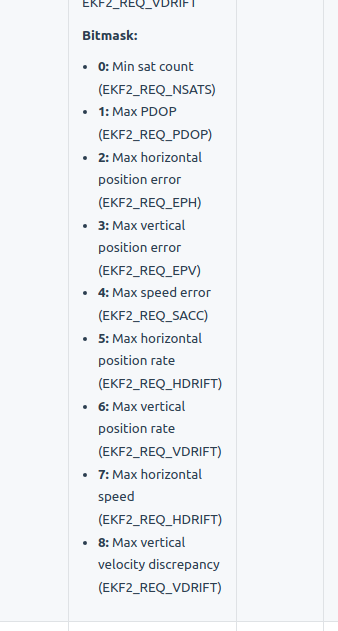
There's also the GPS check you can experiment with to see what exactly the error is to get to ready (most likely interference). You can try turning off bit 4 for instance. Your mask is currently set to the default 245 or 11110101.
-
EKF2_AID_MASK should be set to 1 for GPS.
Have you set CP_DIST > 0? From the warning, it looks like you have the avoidance system on and it may be seeing something.
How are you mounting the GPS unit? Just an un-modified RB5 with mast? I assume you're outdoors with a clear view of the sky. In some cases, interference will throw that error. Setting COM_ARM_WO_GPS will always allow you to arm despite GPS errors. If you still can't arm, there's usualy another issue, maybe as stated above that the obstacle avoidance system is enabled. Another place to check is in QGC under safeties to ensure the avoidance system is disabled.
Againg for the GPS< Flashing blue, means it's still waiting for the GPS to be fully ready. Small blue LED on the side will flash blue showing a lock.
You can also try opening up the GPS check values or disabling some checks. For instance you can open up ekf2_req_sacc from 0.5 to about 0.75.
There's also the GPS check you can experiment with to see what exactly the error is to get to ready (most likely interference). You can try turning off bit 4 for instance. Your mask is currently set to the default 245 or 11110101.
@RichieRich
GPS unit is mounted by default (as it comes with RB5 5G drone), mast is locked in vertical postion.
Turning EKF2_REQ_SACC to 0,75 provided no errors from GPS.
Obstacle avoidance was also disabled, so we managed to fly.But I'm still a bit confused why the obstacle avoidance gives error, since the drone was placed on the ground (concrete pavement), no obstacles within few meters, while the minimum distance was set to only 1 m. But this is current setup that works:
Many thanks for your help. We'll try to figure this out and provide info in a few days.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login