Motor issues when running ESC calibration
-
@Alex-Kushleyev
ssh'd into Linux PC.
Connected to ESC with USB to SERIAL
voxl2:/usr/share/modalai/voxl-esc-tools/voxl-esc-scan.pyreceived same error as Windows PC.
No ESCs detected
-
What do you mean "ssh'd into Linux PC" ?
I am suggesting to connect the ESC to a standalone Linux PC and run the
voxl-esc-scan.pyon the linux PC (not on VOXL2).Just wanted to clarify..
I tested the SDK 1.2.0 and the tools are working fine, it seems.
-
On the Linux PC we are directly connected to 4 pin JST on ESC to USB.
I ssh'd into VOXL2 from the Linux PC terminal.
I ran voxl-esc-scan.py in VOXL2 (same results) No ESCs detected.
I ran same command in Linux terminal (not ssh'd into VOXL2) same results. No ESCs detected.
This is including running same command in /usr/share/modalai/voxl-esc-tools/.voxl-esc-scan.py
RDJ
-
@Alex-Kushleyev power is on the UAV and ESC gave proper Flashes/Tones.
-
@rdjarvis , which serial to usb cable are you using? have you tested it with an ESC before? I am wondering if the RX/TX connections are correct and not swapped.
Also, do you have any other Modalai ESC you can test just to make sure the cables are working?
-
MCBL-00091-1
USB to Serial UART Cable from ModalAI
Both right out of the new bag.We have 2 of these. Tested both. Same results.
-
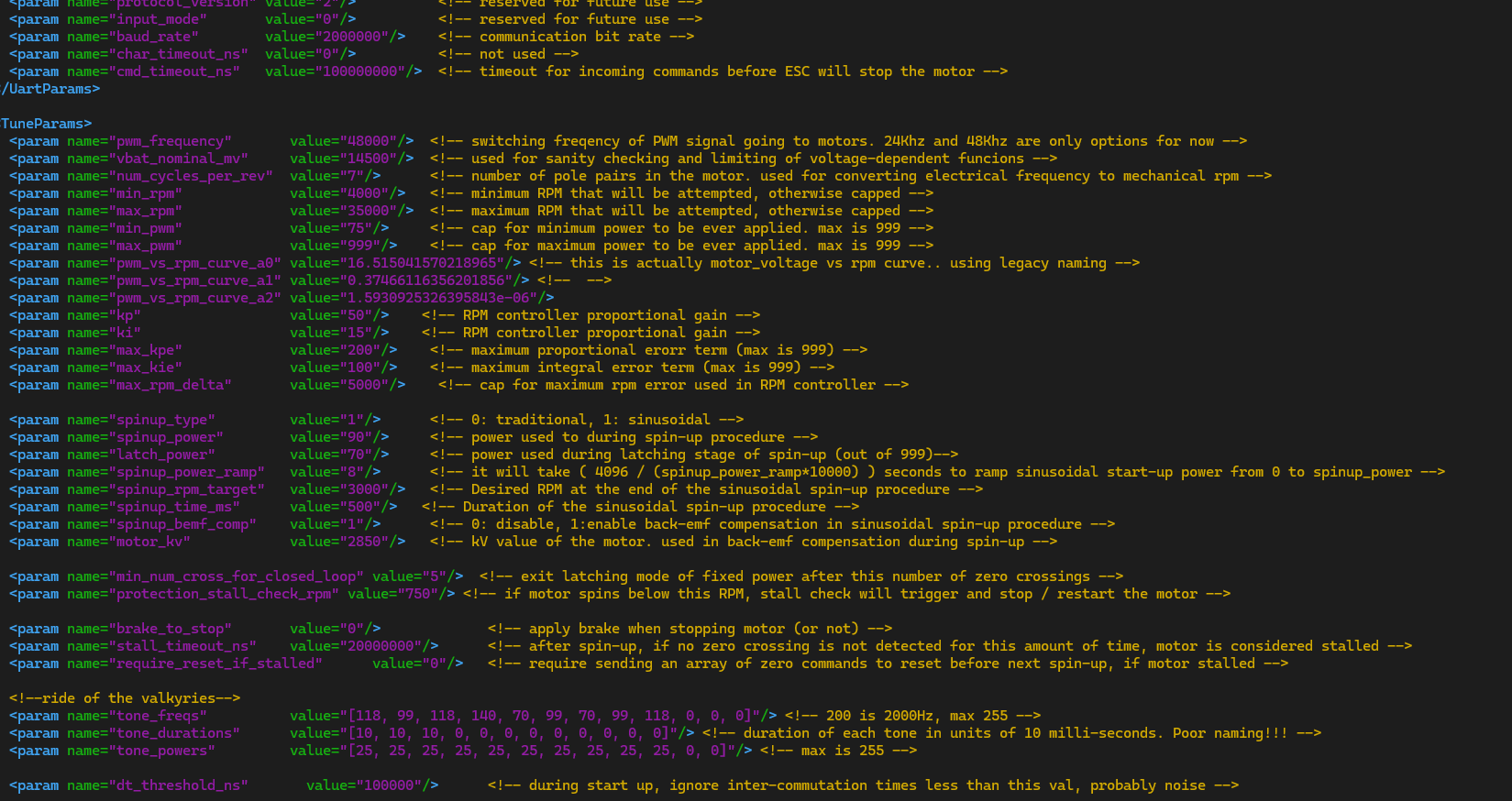
@rdjarvis , ok so just to clarify.. as soon as you uploaded the new params that I provided, the esc stopped communicating? Can you please check to make sure you did not modify the baud rate in the param file before uploading?
-
-
@Alex-Kushleyev The params you sent worked. I tested the new motors params, with the aggressive test procedures you sent.
They worked. Motors performed well and we confirmed the sinusoidal spin-up.
Binded Spektrum DSMX RX/TX and calibrated through QGC.
RC channels successfully calibrated in QGC.
Programed switches for Flight Modes.
ARM/DISARMED Motor kill all successful.Armed for maiden flight. Slowly increased throttle with no motor response.
This led us to where we are now.
-
@rdjarvis , thank you for clarifying.
it seems there is some hardware issue. Can you please confirm that nothing is making contact with the ESC components, which could cause a short or something like this? Also please inspect the 4-pin UART connector on the ESC (and around it) to make sure there is no short or anything like that cause by loose debris or anything else.
-
We just verified all solder and JST connections on the ModalAI FPV 4n1 ESC and VOXL2.
All connections are good. No shorts, no solder balls. 4 PIN USB JST connections to and from ESC and VOXL are in perfect condition and reflect no sign of wear and tear. The first time they have been disconnected for either board was for this test.
Upon reconnecting, and power being applied all lights and tones are heard from ESC, and able to ssh into VOXL2 with no issues.
Ran esc scan and esc detect, resulting in NO ESCs DETECTED.
-
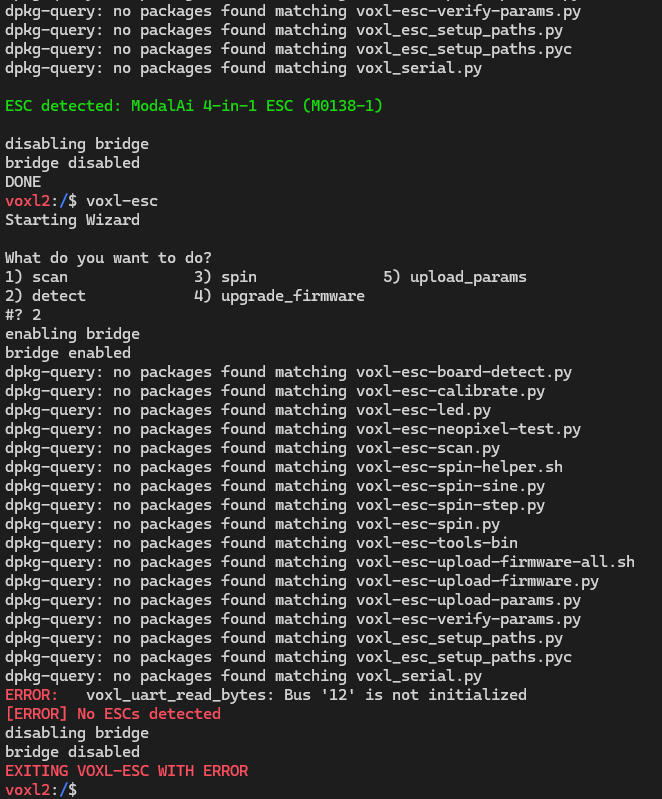
We tried a new ESC, Modalai M0138-1, and that was detected. We are replacing the hardware and will resume testing.
-
Top lines are from FPV ESC#2. (GREEN ESC DETECTED)
Bottom lines are from FPV ESC#1.
ERROR: voxl_uart_read_bytes: Bus '12' is not initialized
This has been a common ERROR with these tests. What is "Bus 12" and how do we initialize it?
-
**UPDATE.
#2 ModalAI FPV connected to VOXL2 and 4x T-Motor 2203.5 2850kv
Good connections, good lights and tones, VOXL2 connected to PC perfectly
Loaded params provided by you and conducted good spin test.
Connected to QGC, arm/disarm/motor kill all successful. (spins / stops)
Armed in Manual and Stabilized, motors armed and when throttle added there is no response from motors. we can view on QGC when throttle (Channel 3) is increased and get positive value.
Verified all other channels operating in QGC Radio tab. Low, High PWM values are in limits, positive response for pitch, roll, and yaw commands.
NO RESPONSE FROM ESC/MOTORS ON THROTTLE INPUTS. MOTORS DO RESPOND TO DIFFERENT ANGLES TO TRY AND LEVEL BUT NO THROTTLE INPUT REGISTERED WHEN USING RC.
-
@rdjarvis, so when you arm, the motors are spinning at idle rpm and rpms are not changing? Can you send me a short px4 log of this test?
Did you update px4 params for voxl esc min and max rpms?
-
@Alex-Kushleyev yes motors spin when armed and respond appropriately to pitch, yaw and roll inputs (motors slowing and speeding up)
We have exhausted our efforts for this evening and will re-attack in the morning.
Thank you for all the help with hunting down these issues. We appreciate it and understand the frustration with these things.
Thank you,
RDJ -
@rdjarvis , based on your latest post, it seems the motors are spinning and responding to roll, pitch, yaw inputs, so i think the remaining issues may be in PX4 params.
By the way, I also wanted to mention, we have a fork of px4 flight review tool here : https://github.com/modalai/px4-flight-review . There is a quickstart guide in readme how to run this locally. Our version allows you to display ESC data such as commanded and actual RPMs, ESC temperatures, individual motor currents (where available) and total battery current.
By the way, since you are probably not using an APM for voltage/current monitoring, you should set (or double check) the
voxl_escpx4 driver to publish the voltage/current measurement, usingVOXL_ESC_PUB_BSTset to1.Then you will see the battery voltage and total current in battery status. (however if you are using APM, then you dont need that, set to 0)Alex
-
@Alex-Kushleyev We are using the supplied PM from ModalAI C11 dev kit.
Tested this morning. All VOXL2 systems good.
Arm/Disarmed-Good
Arm/Motor Kill-GoodArm/Manual-Throttle Increase on RC Controller, UAV motors do not respond proportional to RC inputs. When throttle is increases, motors perform a very slow increase in RPM that does achieve flight. RPMs stay very low.
Could you point us to the PX4 params that we should be looking at to verify proper configuration?
-
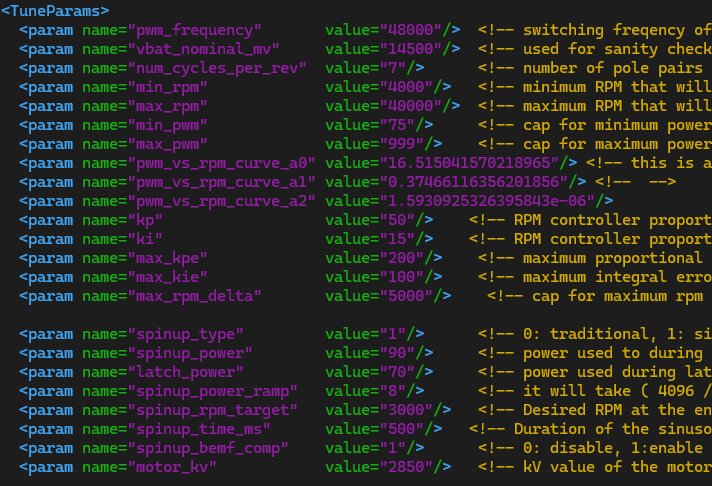
@rdjarvis , besides the PID tuning params, you need to make sure the min and max rpms in PX4 match what you have in esc params:
VOXL_ESC_RPM_MINandVOXL_ESC_RPM_MAX. did you set these PX4 params to 4000 and 40000? (btw in your test, was the motor able to reach 40K rpm? with my more aggressive prop, i think i had about 35K max).It is not a big deal if your ESC param in the ESC itself has maximum rpm that is higher than the motor can achieve. The ESC will just try to apply 100% power and will reach whatever rpm the motor can run at 100% power. But in PX4 params, you need to make sure that you set the maximum rpm that is actually achievable, otherwise PX4 will request the rpm that ESC cannot achieve and the drone will be less stable at maximum thrust.
-
Yes, we confirmed the Params in PX4 QGC are identical to the Params in VOXL. Yes, Max RPM when performing calibration tests was 42k. I set it at 40k in both PX4 and VOXL-esc-params.
No response from throttle input when armed. We recalibrated the Radio and ensured RC Channel 3 was responding to Tx input.