@Alex-Kushleyev I initially tried using an LCD screen for the checkerboard, but the camera wasn't detecting it. Should I move the camera around when transitioning between boxes on the LCD screen?
Afterward, I reverted to the physical checkerboard and moved slowly during calibration. Additionally, I switched to the stereo camera configuration (https://docs.modalai.com/voxl2-camera-configs/#c-10-front-stereo-only-ov7251). Calibration completed successfully, and I was able to start the voxl-dfs-server (after renaming the intrinsics/extrinsics files to match the DFS configuration).
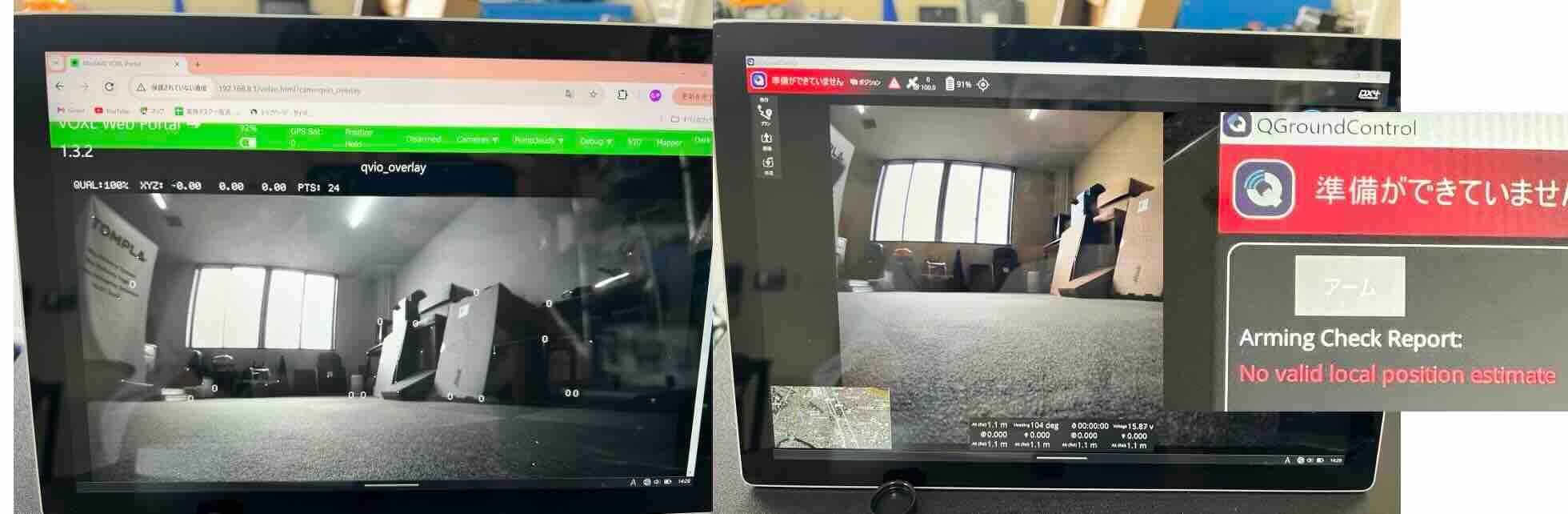
However, I'm still not seeing valid output data in the VOXL Portal. Both the DFS server status and journal logs appear normal. Any idea what might be causing this?
The orientation was labeled vertical in the extrinsics file, I updated it to horizontal since the cameras are mounted in that direction, I tried both.
voxl2:~$ voxl-calibrate-camera stereo -s 6x9 -l 0.0254
Waiting for valid pipe...
Please open voxl-portal in a web browser to view the camera calibrator overlay stream
Running Calibration...
Calibrating Left Camera
using intrinsics guess for ov7251 stereo cam
Matrix
[512.0490656858071, 0, 317.943082105687;
0, 512.9677676044445, 249.1010817824914;
0, 0, 1]
Distortion
[-0.2223760024137635;
0.2834698825913266;
0.006375005556120415;
0.001380405690556171;
-0.3234049381178579]
distortion_model: plumb_bob
Re-projection error reported by calibrateCamera: 0.618295
Calibration Succeded!
Calibrating Right Camera
using intrinsics guess for ov7251 stereo cam
Matrix
[499.9941123870856, 0, 302.2300515222531;
0, 500.0159138740167, 197.2845691878148;
0, 0, 1]
Distortion
[-0.1920328131645855;
0.1661211129668493;
-9.2603546772169e-06;
-0.0005742159007090549;
-0.1386842520292771]
distortion_model: plumb_bob
Re-projection error reported by calibrateCamera: 0.654897
Calibration Succeded!
Calibrating Extrinsics
7 frames will be processed
Processing non-fisheye stereo
R
[0.9998717783469182, -0.01301971984148091, 0.009322754990917012;
0.01315096821001574, 0.9998132816974246, -0.01415816995820597;
-0.009136678855605861, 0.01427895782876463, 0.9998563059074108]
T
[-0.09106229154044132;
0.0003557888497092847;
-0.01247277836064075]
Re-projection error reported by stereoCalibrate: 0.921971
Detected horizontal stereo pair
Distance between cameras: 0.0911
Extrinsics Calibration Succeded!
Saved intrinsics to: /data/modalai/opencv_stereo_intrinsics.yml
Saved extrinsics to: /data/modalai/opencv_stereo_extrinsics.yml
Exiting Cleanly
[image: 1745965925691-ce4025ae-5114-4473-ae6a-d9e4862c4b13-image.png]
cat opencv_stereo_front_extrinsics.yml
%YAML:1.0
---
R: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 9.9987177834691821e-01, -1.3019719841480912e-02,
9.3227549909170124e-03, 1.3150968210015740e-02,
9.9981328169742456e-01, -1.4158169958205966e-02,
-9.1366788556058610e-03, 1.4278957828764632e-02,
9.9985630590741081e-01 ]
T: !!opencv-matrix
rows: 3
cols: 1
dt: d
data: [ -9.1062291540441320e-02, 3.5578884970928471e-04,
-1.2472778360640750e-02 ]
reprojection_error: 9.2197082833254862e-01
orientation: vertical
calibration_time: "2025-04-29 21:24:04"
cat opencv_stereo_front_intrinsics.yml
%YAML:1.0
---
M1: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 5.1204906568580714e+02, 0., 3.1794308210568698e+02, 0.,
5.1296776760444448e+02, 2.4910108178249143e+02, 0., 0., 1. ]
D1: !!opencv-matrix
rows: 5
cols: 1
dt: d
data: [ -2.2237600241376348e-01, 2.8346988259132661e-01,
6.3750055561204149e-03, 1.3804056905561710e-03,
-3.2340493811785792e-01 ]
reprojection_error1: 6.1829492384868989e-01
M2: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 4.9999411238708558e+02, 0., 3.0223005152225312e+02, 0.,
5.0001591387401669e+02, 1.9728456918781478e+02, 0., 0., 1. ]
D2: !!opencv-matrix
rows: 5
cols: 1
dt: d
data: [ -1.9203281316458551e-01, 1.6612111296684931e-01,
-9.2603546772168998e-06, -5.7421590070905486e-04,
-1.3868425202927714e-01 ]
reprojection_error2: 6.5489679777844001e-01
width: 640
height: 480
distortion_model: plumb_bob
calibration_time: "2025-04-29 21:24:04"