@Thomas-Müller interesting. i'm just experience the very same thing. have you by chance figured out what was the issue?
Viktor Gal
@Viktor Gal
Posts
-
VOXL2 TOF Camera not working -
flashing starling 1.1.4 with the latest 1.4.5@Alex-Kushleyev yes yes, it boots up fine in normal mode
-
flashing starling 1.1.4 with the latest 1.4.5@Alex-Kushleyev you reckon? i mean the starling v2 just went to fastboot mode very nicely and i could flash it easily on the same macos. or is there so much of a difference between the starling v1 and v2 chips? i'll give it a go on the raspberry pi.
-
flashing starling 1.1.4 with the latest 1.4.5using the dip switch and powercycling there's no devices showing up with
sudo fastboot devices.unfortunately no
lsbusbas i'm under macos, but sysprofiler's output is:Host Controller Driver: AppleT6000USBXHCI QUSB_BULK_CID:0412_SN:008A1847: Product ID: 0x9008 Vendor ID: 0x05c6 (Qualcomm, Inc) Version: 0.00 Speed: Up to 480 Mb/s Manufacturer: Qualcomm CDMA Technologies MSM Location ID: 0x01100000 / 1 Current Available (mA): 500 Current Required (mA): 2 Extra Operating Current (mA): 0if you really think there's some extra info with lsusb that you are looking for i can hook it up to my raspberry pi.
-
flashing starling 1.1.4 with the latest 1.4.5@Alex-Kushleyev as said above with the very same machine i successfully updated a starling v2 drone. but i'll try to check what you've just suggested.
-
elrs fw compatibility@Maxwell-Schaefer thnx for getting back to me. i've seen that on starling the betafpv module is currently having 3.2.1.2. are you using any specific customiziation? i'm just wondering as the mavlink-rc support requires 3.5.0 or later.
-
flashing starling 1.1.4 with the latest 1.4.5i have an older starling (v1) with a preinstalled 1.1.4 voxl2 sdk. i'm trying to flash it with the latest 1.4.5 version and i'm having problems as the device does not go into fastboot mode, note i've tried power cycling and switching the fastboot dip switch to on. I've attached the logs.
additional info: doing the same (without actually needing to do the fastboot switch turning on) i've successfully flashed the 1.4.5 on a starling v2!
-
elrs fw compatibilityalthough this is a general question for voxl sdk since i'm using it with starlings i'm wondering whether there's any limitation (or has anybody tested) for the FW version of the ELRS controller with the latest voxl2 sdk? meaning the latest release of the ELRS FW is 3.5.5, my iflight commando is flashed with a custom modalai v2.8.5, and i'm wondering if anybody tested with 3.5.x FW....?
-
starling 2 RMA@tom as said when we swapped the voxl2 board from another drone everything works fine. moreover, i assume that the board should work without connecting anything to it (just power and usbc) but there's 0 signal from the voxl2 board itself. meaning nothing pops up in lsusb -v.
-
starling 2 RMAI'm writing you as I couldn't find relevant information regarding my question neither in the forum nor at the FAQ section. We purchased about 6 drones from you in the past and currently facing a problem with one of our drones. basically the VOXL2 main board seems to be dead. we've tried to connect to it via usb from various computers, but it doesn't even show up in the dmesg/lsusb. since we have many other drones (hence parts) we quickly eliminated the other options, i.e. other parts being broken. it is definitely the main voxl2 board.
I'm wondering now whether in this case, for creating an RMA, would it be sufficient for you that we send back the board itself or you really need us to send back the full Starling 2 drone itself?
-
Timeline for open-vins documentation@Moderator et.al. i just want to follow up that switching to the nightly builds that uses out of box the openvins implementation for VIO, is significantly better than the qvio. in other words, it actually fixed all the problems that we were facing with the QVIO.
-
Timeline for open-vins documentation@Moderator yep, back and forth. unfortunately no change.
-
Timeline for open-vins documentation@Zachary-Lowell-0 i hear you, but could you maybe give some pointers how one could make the qvio more stable? as i said it is at the moment only has 25% success rate: meaning 1 out of 5 flights i dont have problems with the qvio, the rest of the time the drone becomes unstable and crashes.
-
Timeline for open-vins documentation@Zachary-Lowell-0 hey so i did what you suggested, here's the full output of openvins server but it's the very same behaviour; the qvio is nicely picking up the movements, openvins is just stationary on the portal. here are the detailed logs:
voxl2:~$ voxl-open-vins-server --verbosity 0 Setting printing level to: SILENT Setting printing level to: ALL Loading our own config file ================================================================= =========================AUTO RESET============================== en_auto_reset: 1 auto_reset_max_velocity: 20.000 auto_reset_max_v_cov_instant: 0.100 auto_reset_max_v_cov: 0.100 auto_reset_max_v_cov_timeout_s: 0.500 auto_reset_min_features: 1 auto_reset_min_feature_timeout_s: 3.000 auto_fallback_timeout_s: 3.000 auto_fallback_min_v: 0.600 en_cont_yaw_checks: false fast_yaw_thresh: 5.000 fast_yaw_timeout_s: 1.750 ===========================STATE================================= do fej: true imu avg: true use rk4 integration: true cam to imu refinement: true cam intrins refinement: true cam imu ts refinement: true max clone size: 8 max slam features: 40 max slam in update: 25 max msckf in update: 25 feat rep msckf: ANCHORED_MSCKF_INVERSE_DEPTH feat rep slam: ANCHORED_MSCKF_INVERSE_DEPTH cam imu time offset: 0.00150 slam delay: 1.00000 ================================================================= =====================INERTIAL INITIALIZER======================== gravity mag: 9.80665 init window time: 1.00000 init imu thresh: 1.00000 init dyn use: false ================================================================= ==========================IMU NOISE============================== imu sigma w: 0.00014 imu sigma wb: 0.00000 imu sigma a: 0.00389 imu sigma ab: 0.00006 ================================================================= ========================FEATURE NOISE============================ msckf chi^2 multiplier: 1.00000 msckf sigma px: 1.00000 slam chi^2 multiplier: 40.00000 slam sigma px: 1.80000 zupt chi^2 multiplier: 1.00000 zupt sigma px: 1.00000 ================================================================= =============================ZUPT================================ try zupt: true zupt max velocity: 0.03000 zupt only at beginning: true zupt noise multiplier: 1.00000 zupt max disparity: 3.00000 ================================================================= use mask: true use stereo: false use baro: false ================================================================= ========================FEATURE INITIALIZER====================== triangulate 1d: false refine features: false max runs: 5 init lamda: 0.00100 max lamda: 10000000000.00000 min dx: 0.00000 min dcost: 0.00000 lam mult: 10.00000 min dist: 0.10000 max dist: 60.00000 max baseline: 40.00000 num_opencv_threads: 9 fast_threshold: 15 histogram_method: HISTOGRAM knn_ratio: 0.70000 track_frequency: 15.00000 publish_frequency: 3 imu takeoff accel thresh: 0.10000 force init on takeoff: false use takeoff_camera_as: 0 takeoff_threshold(m): -0.100000 publish stats: false max_allowable_cep: 1.00000 force FLU to NED transform: false VIO always on (for bench testing): false ================================================================= ================================================================= Number of cameras found for this config: 1 [INFO] External feature trackers being used? false camera count: 1 MONO mode (using cam idx: 0) Number of cameras found for this config: 1 [INFO] External feature trackers being used? false camera count: 1 MONO mode (using cam idx: 0) Skipping camera group index: 2, not enabled Loading OpenCV intrinsics cal file from: /data/modalai/opencv_tracking_front_intrinsics.yml Loading OpenCV intrinsics cal file from: /data/modalai/opencv_tracking_down_intrinsics.yml cam_load_extrinsics_file World Rotation Matrix: 1.000000 0 0 0 1.000000 0 0 0 1.000000 load extrinsics 2 Using extrinsics under camera ID: tracking_front [INFO] Camera: 0 -- converted extrinsics *in FLU* are: Roll: -0.000000, Pitch 90.000000, Yaw -90.000000 (local) CAMERA ROTATION MATRIX: [0, 0, 1; -1, 0, 0; 0, -1, 0] (local) CAMERA TRANSLATION: 0.037 -0 -0.0006 Using extrinsics under camera ID: tracking_down [INFO] Camera: 1 -- converted extrinsics *in FLU* are: Roll: -0.000000, Pitch 180.000000, Yaw -360.000000 (local) CAMERA ROTATION MATRIX: [-1, 0, 0; 0, 1, 0; 0, 0, -1] (local) CAMERA TRANSLATION: -0.08825 0.0045 -0.00269 Done transfer camera configuration transfer ================================================================= ==========================CAMERA 0================================ name: tracking_front mode: MONO camera matrix: 460.27780 0.00000 621.21213 0.00000 459.85438 408.51998 0.00000 0.00000 1.00000 distortion coefficients: 0.05324 0.02329 -0.00926 0.00026 ==========================CAMERA 1================================ name: tracking_front mode: MONO camera matrix: 462.04073 0.00000 660.98324 0.00000 462.09738 397.45450 0.00000 0.00000 1.00000 distortion coefficients: 0.04984 0.04004 -0.02646 0.00611 =============================KLT================================= num_features_to_track: 30 grid_x: 5 grid_y: 5 min_pix_dist: 50 pyramid_levels: 5 [block] window_size: (25 x 25) ===========================KLTGYRO=============================== tmp_imu_name: imu_apps tracking_front wrt imu_apps: 0.00000 0.00000 1.00000 -1.00000 0.00000 0.00000 0.00000 -1.00000 0.00000 tracking_down wrt imu_apps: -1.00000 0.00000 0.00000 0.00000 1.00000 0.00000 0.00000 0.00000 -1.00000 Loading external config file =====> imu to read from: imu OpenVINS using fisheye camera OpenVINS FINAL Cam extrinsics to IMU for tracking_front: 7 -0.5 0.5 -0.5 0.5 0.037 -0 -0.0006 OpenVINS using fisheye camera OpenVINS FINAL Cam extrinsics to IMU for tracking_down: 7 -1.22465e-16 -1 -7.4988e-33 -6.12323e-17 -0.08825 0.0045 -0.00269 ++++++++++++++++++++++++++ OpenVINS reports number of cameras being used, regardless of delivery method (pipe, merge, etc...): 2 ++++++++++++++++++++++++++ VioManagerOptions.h:108 ESTIMATOR PARAMETERS: StateOptions.h:108 - use_fej: 1 StateOptions.h:109 - use_imuavg: 1 StateOptions.h:110 - use_rk4int: 1 StateOptions.h:111 - calib_cam_extrinsics: 1 StateOptions.h:112 - calib_cam_intrinsics: 1 StateOptions.h:113 - calib_cam_timeoffset: 1 StateOptions.h:114 - max_clones: 8 StateOptions.h:115 - max_slam: 40 StateOptions.h:116 - max_slam_in_update: 25 StateOptions.h:117 - max_msckf_in_update: 25 StateOptions.h:118 - max_aruco: 1024 StateOptions.h:119 - max_cameras: 2 StateOptions.h:120 - feat_rep_msckf: ANCHORED_MSCKF_INVERSE_DEPTH StateOptions.h:121 - feat_rep_slam: ANCHORED_MSCKF_INVERSE_DEPTH StateOptions.h:122 - feat_rep_aruco: GLOBAL_3D InertialInitializerOptions.h:125 INITIALIZATION SETTINGS: InertialInitializerOptions.h:150 - init_window_time: 1.00 InertialInitializerOptions.h:151 - init_imu_thresh: 1.00 InertialInitializerOptions.h:152 - init_max_disparity: 3.00 InertialInitializerOptions.h:153 - init_max_features: 0.00 InertialInitializerOptions.h:171 - init_dyn_use: 0 InertialInitializerOptions.h:172 - init_dyn_mle_opt_calib: 0 InertialInitializerOptions.h:173 - init_dyn_mle_max_iter: 20 InertialInitializerOptions.h:174 - init_dyn_mle_max_threads: 20 InertialInitializerOptions.h:175 - init_dyn_mle_max_time: 2.00 InertialInitializerOptions.h:176 - init_dyn_num_pose: 8 InertialInitializerOptions.h:177 - init_dyn_min_deg: 45.00 InertialInitializerOptions.h:178 - init_dyn_inflation_ori: 1.00e+01 InertialInitializerOptions.h:179 - init_dyn_inflation_vel: 1.00e+01 InertialInitializerOptions.h:180 - init_dyn_inflation_bg: 1.00e+02 InertialInitializerOptions.h:181 - init_dyn_inflation_ba: 1.00e+02 InertialInitializerOptions.h:182 - init_dyn_min_rec_cond: 1.00e-15 InertialInitializerOptions.h:188 - init_dyn_bias_g: 0.00, 0.00, 0.00 InertialInitializerOptions.h:189 - init_dyn_bias_a: 0.00, 0.00, 0.00 InertialInitializerOptions.h:216 NOISE PARAMETERS: InertialInitializerOptions.h:224 - gyroscope_noise_density: 0.000170 InertialInitializerOptions.h:225 - accelerometer_noise_density: 0.00200 InertialInitializerOptions.h:226 - gyroscope_random_walk: 0.0000194 InertialInitializerOptions.h:227 - accelerometer_random_walk: 0.003000 InertialInitializerOptions.h:228 - sigma_pix: 1.00 InertialInitializerOptions.h:318 STATE PARAMETERS: InertialInitializerOptions.h:319 - gravity_mag: 9.8066 InertialInitializerOptions.h:320 - gravity: 0.000, 0.000, 9.807 InertialInitializerOptions.h:321 - num_cameras: 2 InertialInitializerOptions.h:322 - use_stereo: 0 InertialInitializerOptions.h:323 - downsize cameras: 0 InertialInitializerOptions.h:332 - calib_camimu_dt: 0.0000 InertialInitializerOptions.h:348 cam_0_fisheye:1 cam_0_wh: 1280 x 800 cam_0_intrinsic(0:3): 460.278 459.854 621.212 408.52 cam_0_intrinsic(4:7): 0.0532387 0.0232891 -0.0092603 0.000263136 cam_0_extrinsic(0:3): -0.5 0.5 -0.5 0.5 cam_0_extrinsic(4:6): 0.037 -0 -0.0006 T_C0toI: 0 2.22045e-16 1 0.0006 -1 2.22045e-16 0 0.037 -2.22045e-16 -1 2.22045e-16 8.34888e-18 0 0 0 1 InertialInitializerOptions.h:348 cam_1_fisheye:1 cam_1_wh: 1280 x 800 cam_1_intrinsic(0:3): 462.041 462.097 660.983 397.455 cam_1_intrinsic(4:7): 0.0498391 0.040037 -0.0264578 0.0061076 cam_1_extrinsic(0:3): -1.22465e-16 -1 -7.4988e-33 -6.12323e-17 cam_1_extrinsic(4:6): -0.08825 0.0045 -0.00269 T_C1toI: -1 2.44929e-16 1.22465e-16 -0.08825 2.44929e-16 1 0 -0.0045 -1.22465e-16 2.99952e-32 -1 -0.00269 0 0 0 1 VioManagerOptions.h:121 - dt_slam_delay: 1.0 VioManagerOptions.h:122 - zero_velocity_update: 1 VioManagerOptions.h:123 - zupt_max_velocity: 0.03 VioManagerOptions.h:124 - zupt_noise_multiplier: 1.00 VioManagerOptions.h:125 - zupt_max_disparity: 3.0000 VioManagerOptions.h:126 - zupt_only_at_beginning?: 1 VioManagerOptions.h:127 - record timing?: 0 VioManagerOptions.h:128 - record timing filepath: ov_msckf_timing.txt VioManagerOptions.h:155 NOISE PARAMETERS: NoiseManager.h:62 - gyroscope_noise_density: 0.000140 NoiseManager.h:63 - accelerometer_noise_density: 0.00389 NoiseManager.h:64 - gyroscope_random_walk: 0.0000004 NoiseManager.h:65 - accelerometer_random_walk: 0.000055 VioManagerOptions.h:179 Updater MSCKF Feats: UpdaterOptions.h:45 - chi2_multipler: 1.0 UpdaterOptions.h:46 - sigma_pix: 1.00 VioManagerOptions.h:181 Updater SLAM Feats: UpdaterOptions.h:45 - chi2_multipler: 40.0 UpdaterOptions.h:46 - sigma_pix: 1.80 VioManagerOptions.h:183 Updater ARUCO Tags: UpdaterOptions.h:45 - chi2_multipler: 5.0 UpdaterOptions.h:46 - sigma_pix: 1.00 VioManagerOptions.h:185 Updater ZUPT: UpdaterOptions.h:45 - chi2_multipler: 1.0 UpdaterOptions.h:46 - sigma_pix: 1.00 VioManagerOptions.h:292 STATE PARAMETERS: VioManagerOptions.h:293 - gravity_mag: 9.8100 VioManagerOptions.h:294 - gravity: 0.000, 0.000, 9.810 VioManagerOptions.h:295 - camera masks?: 1 VioManagerOptions.h:304 - calib_camimu_dt: 0.0015 VioManagerOptions.h:320 cam_0_fisheye:1 cam_0_wh: 1280 x 800 cam_0_intrinsic(0:3): 460.278 459.854 621.212 408.52 cam_0_intrinsic(4:7): 0.0532387 0.0232891 -0.0092603 0.000263136 cam_0_extrinsic(0:3): -0.5 0.5 -0.5 0.5 cam_0_extrinsic(4:6): 0.037 -0 -0.0006 T_C0toI: 0 2.22045e-16 1 0.0006 -1 2.22045e-16 0 0.037 -2.22045e-16 -1 2.22045e-16 8.34888e-18 0 0 0 1 VioManagerOptions.h:320 cam_1_fisheye:1 cam_1_wh: 1280 x 800 cam_1_intrinsic(0:3): 462.041 462.097 660.983 397.455 cam_1_intrinsic(4:7): 0.0498391 0.040037 -0.0264578 0.0061076 cam_1_extrinsic(0:3): -1.22465e-16 -1 -7.4988e-33 -6.12323e-17 cam_1_extrinsic(4:6): -0.08825 0.0045 -0.00269 T_C1toI: -1 2.44929e-16 1.22465e-16 -0.08825 2.44929e-16 1 0 -0.0045 -1.22465e-16 2.99952e-32 -1 -0.00269 0 0 0 1 VioManagerOptions.h:426 FEATURE TRACKING PARAMETERS: VioManagerOptions.h:427 - use_stereo: 0 VioManagerOptions.h:428 - use_klt: 1 VioManagerOptions.h:429 - use_aruco: 0 VioManagerOptions.h:430 - downsize aruco: 1 VioManagerOptions.h:431 - downsize cameras: 0 VioManagerOptions.h:432 - num opencv threads: 9 VioManagerOptions.h:433 - use multi-threading pubs: 1 VioManagerOptions.h:434 - use multi-threading subs: 1 VioManagerOptions.h:435 - num_pts: 30 VioManagerOptions.h:436 - fast threshold: 15 VioManagerOptions.h:437 - grid X by Y: 5 by 5 VioManagerOptions.h:438 - min px dist: 50 VioManagerOptions.h:439 - hist method: 1 VioManagerOptions.h:440 - knn ratio: 0.700 VioManagerOptions.h:441 - track frequency: 15.0 VioManagerOptions.h:442 - limit imu propagation (windows based on init_imu+cam-imu delay): 1 FeatureInitializerOptions.h:87 - triangulate_1d: 0 FeatureInitializerOptions.h:88 - refine_features: 0 FeatureInitializerOptions.h:89 - max_runs: 5 FeatureInitializerOptions.h:90 - init_lamda: 0.001 FeatureInitializerOptions.h:91 - max_lamda: 10000000000.000 FeatureInitializerOptions.h:92 - min_dx: 0.0000010 FeatureInitializerOptions.h:93 - min_dcost: 0.0000010 FeatureInitializerOptions.h:94 - lam_mult: 10.000 FeatureInitializerOptions.h:95 - min_dist: 0.100 FeatureInitializerOptions.h:96 - max_dist: 60.000 FeatureInitializerOptions.h:97 - max_baseline: 40.000 FeatureInitializerOptions.h:98 - max_cond_number: 600000.000 Set camera intrinsics and extrinsics ====> Using Internal KLT feature tracker <==== >>>>>>>>>> Current reference counts: trackDB: 1 trackFEATS: 1 propagator: 2 updaterMSCKF: 1 updaterSLAM: 1 active_tracks_initializer: 1 initializer: 1 setting scheduler INFO: set FIFO priority successfully! create_server_pipes connecting client pipes Number of Cameras active: 2 Camera merge --- > ch: 1 to cam id: 0 Opening camera pipe: tracking_front tmp_camera_pipe_names.push_back(): tracking_front Camera merge --- > ch: 2 to cam id: 1 Opening camera pipe: tracking_down tmp_camera_pipe_names.push_back(): tracking_down imu pipe name: imu_apps Camera processing thread is now locked to the following cores: 7 VioManager.cpp:454 [TIME]: 0.0358 seconds for tracking VioManagerHelper.cpp:174 [init]: failed initialization in 0.0000 seconds VioManager.cpp:454 [TIME]: 0.0139 seconds for tracking InertialInitializer.cpp:127 [init]: not enough feats to compute disp: 0,0 < 15 VioManagerHelper.cpp:174 [init]: failed initialization in 0.0002 seconds VioManager.cpp:454 [TIME]: 0.0170 seconds for tracking InertialInitializer.cpp:127 [init]: not enough feats to compute disp: 0,0 < 15 VioManagerHelper.cpp:174 [init]: failed initialization in 0.0003 seconds VioManager.cpp:454 [TIME]: 0.0162 seconds for tracking InertialInitializer.cpp:127 [init]: not enough feats to compute disp: 0,62 < 15 VioManagerHelper.cpp:174 [init]: failed initialization in 0.0001 seconds VioManager.cpp:454 [TIME]: 0.0112 seconds for tracking InertialInitializer.cpp:127 [init]: not enough feats to compute disp: 0,62 < 15 VioManagerHelper.cpp:174 [init]: failed initialization in 0.0003 seconds VioManager.cpp:454 [TIME]: 0.0175 seconds for tracking InertialInitializer.cpp:127 [init]: not enough feats to compute disp: 0,62 < 15 VioManagerHelper.cpp:174 [init]: failed initialization in 0.0002 seconds VioManager.cpp:454 [TIME]: 0.0156 seconds for tracking InertialInitializer.cpp:127 [init]: not enough feats to compute disp: 0,62 < 15 VioManagerHelper.cpp:174 [init]: failed initialization in 0.0003 seconds VioManager.cpp:454 [TIME]: 0.0105 seconds for tracking InertialInitializer.cpp:127 [init]: not enough feats to compute disp: 0,62 < 15 VioManagerHelper.cpp:174 [init]: failed initialization in 0.0003 seconds VioManager.cpp:454 [TIME]: 0.0169 seconds for tracking InertialInitializer.cpp:134 [init]: *** disparity is 0.000,0.000 (3.00 thresh) InertialInitializer.cpp:145 [init]: USING STATIC INITIALIZER METHOD! IMU samples too small, make your window smaller (params.init_window_time), can't initalize 241.141469 - 240.222589 (0.918880) StaticInitializer.cpp:55 [init-s]: unable to select window of IMU readings, not enough readings VioManagerHelper.cpp:174 [init]: failed initialization in 0.0004 seconds VioManager.cpp:454 [TIME]: 0.0115 seconds for tracking InertialInitializer.cpp:134 [init]: *** disparity is 0.000,0.000 (3.00 thresh) InertialInitializer.cpp:145 [init]: USING STATIC INITIALIZER METHOD! StaticInitializer.cpp:104 [init-s]: IMU excitation stats: 0.029,0.014 VioManagerHelper.cpp:138 [init]: successful initialization in 0.0008 seconds VioManagerHelper.cpp:140 [init]: orientation = -0.0029, 0.0025, 0.0000, 1.0000 VioManagerHelper.cpp:142 [init]: bias gyro = 0.0025, 0.0000, 0.0016 VioManagerHelper.cpp:144 [init]: velocity = 0.0000, 0.0000, 0.0000 VioManagerHelper.cpp:146 [init]: bias accel = 0.0000, 0.0000, -0.0046 VioManagerHelper.cpp:148 [init]: position = 0.0000, 0.0000, 0.0000 VioManagerHelper.cpp:168 [init]: moved the state forward 0.00 seconds StateHelper.cpp:686 new augment clone at timestamp: 241.367844 waiting for enough clone states (1 of 5).... [INFO] TAKEOFF: DISPARITY disturbed, possible motion detected. Avg: 91.364071 (3.000000) # feats: 5 (20). UpdaterZeroVelocity.cpp:242 [ZUPT]: failed disparity (91.364 > 3.000, 5 features) UpdaterZeroVelocity.cpp:255 [ZUPT]: accepted |v_IinG| = 0.003 (chi2 99.575 < 113.145) [INFO] TAKEOFF: DISPARITY disturbed, possible motion detected. Avg: 0.000000 (3.000000) # feats: 5 (20). UpdaterZeroVelocity.cpp:242 [ZUPT]: failed disparity (0.000 > 3.000, 5 features) UpdaterZeroVelocity.cpp:255 [ZUPT]: accepted |v_IinG| = 0.007 (chi2 62.236 < 106.395) UpdaterZeroVelocity.cpp:233 [ZUPT]: passed disparity (0.000 < 3.000, 40 features) UpdaterZeroVelocity.cpp:255 [ZUPT]: accepted |v_IinG| = 0.004 (chi2 88.421 < 119.871) UpdaterZeroVelocity.cpp:233 [ZUPT]: passed disparity (0.000 < 3.000, 40 features) UpdaterZeroVelocity.cpp:255 [ZUPT]: accepted |v_IinG| = 0.004 (chi2 96.190 < 119.871) UpdaterZeroVelocity.cpp:233 [ZUPT]: passed disparity (0.000 < 3.000, 40 features) UpdaterZeroVelocity.cpp:255 [ZUPT]: accepted |v_IinG| = 0.003 (chi2 132.910 < 119.871) UpdaterZeroVelocity.cpp:233 [ZUPT]: passed disparity (0.000 < 3.000, 40 features) UpdaterZeroVelocity.cpp:255 [ZUPT]: accepted |v_IinG| = 0.003 (chi2 95.202 < 119.871) UpdaterZeroVelocity.cpp:233 [ZUPT]: passed disparity (0.000 < 3.000, 40 features) UpdaterZeroVelocity.cpp:255 [ZUPT]: accepted |v_IinG| = 0.003 (chi2 76.613 < 106.395) UpdaterZeroVelocity.cpp:233 [ZUPT]: passed disparity (0.000 < 3.000, 40 features) UpdaterZeroVelocity.cpp:255 [ZUPT]: accepted |v_IinG| = 0.002 (chi2 105.215 < 113.145) UpdaterZeroVelocity.cpp:233 [ZUPT]: passed disparity (0.000 < 3.000, 40 features) UpdaterZeroVelocity.cpp:255 [ZUPT]: accepted |v_IinG| = 0.002 (chi2 86.990 < 119.871) -
Timeline for open-vins documentation@Zachary-Lowell-0 so those params are after running
voxl-configure-mpa; i still dont understand why there's a diff between the apparently same v2 starlings.i can run the imu_apps calibration and retry OV.
-
Timeline for open-vins documentationjust for clarity here's the diff of the two params above:
--- px4.params 2024-10-30 16:15:04.683354722 +0100 +++ Downloads/params_update.params 2024-10-30 16:59:34.597742954 +0100 @@ -25,11 +25,11 @@ 1 1 CAL_ACC0_ID 2490378 6 1 1 CAL_ACC0_PRIO 50 6 1 1 CAL_ACC0_ROT -1 6 -1 1 CAL_ACC0_XOFF -0.004399999976158142 9 +1 1 CAL_ACC0_XOFF -0.041400000452995300 9 1 1 CAL_ACC0_XSCALE 1.000000000000000000 9 -1 1 CAL_ACC0_YOFF 0.004999999888241291 9 +1 1 CAL_ACC0_YOFF -0.014000000432133675 9 1 1 CAL_ACC0_YSCALE 1.000000000000000000 9 -1 1 CAL_ACC0_ZOFF -0.136299997568130493 9 +1 1 CAL_ACC0_ZOFF -0.050900001078844070 9 1 1 CAL_ACC0_ZSCALE 1.000000000000000000 9 1 1 CAL_ACC1_ID 0 6 1 1 CAL_ACC2_ID 0 6 @@ -44,9 +44,9 @@ 1 1 CAL_GYRO0_ID 2490378 6 1 1 CAL_GYRO0_PRIO 50 6 1 1 CAL_GYRO0_ROT -1 6 -1 1 CAL_GYRO0_XOFF 0.009499999694526196 9 -1 1 CAL_GYRO0_YOFF 0.012900000438094139 9 -1 1 CAL_GYRO0_ZOFF 0.003199999919161201 9 +1 1 CAL_GYRO0_XOFF 0.001399999950081110 9 +1 1 CAL_GYRO0_YOFF 0.019099999219179153 9 +1 1 CAL_GYRO0_ZOFF -0.001799999969080091 9 1 1 CAL_GYRO1_ID 0 6 1 1 CAL_GYRO2_ID 0 6 1 1 CAL_GYRO3_ID 0 6 @@ -54,17 +54,17 @@ 1 1 CAL_MAG0_PRIO 75 6 1 1 CAL_MAG0_ROT 0 6 1 1 CAL_MAG0_XCOMP 0.000000000000000000 9 -1 1 CAL_MAG0_XODIAG -0.002300000051036477 9 -1 1 CAL_MAG0_XOFF 0.019600000232458115 9 -1 1 CAL_MAG0_XSCALE 0.371300011873245239 9 +1 1 CAL_MAG0_XODIAG -0.027599999681115150 9 +1 1 CAL_MAG0_XOFF -0.093400001525878906 9 +1 1 CAL_MAG0_XSCALE 1.085199952125549316 9 1 1 CAL_MAG0_YCOMP 0.000000000000000000 9 -1 1 CAL_MAG0_YODIAG 0.009100000374019146 9 -1 1 CAL_MAG0_YOFF 0.122199997305870056 9 -1 1 CAL_MAG0_YSCALE 0.383500009775161743 9 +1 1 CAL_MAG0_YODIAG 0.014800000004470348 9 +1 1 CAL_MAG0_YOFF 0.249599993228912354 9 +1 1 CAL_MAG0_YSCALE 0.836799979209899902 9 1 1 CAL_MAG0_ZCOMP 0.000000000000000000 9 -1 1 CAL_MAG0_ZODIAG 0.008999999612569809 9 -1 1 CAL_MAG0_ZOFF -4.477099895477294922 9 -1 1 CAL_MAG0_ZSCALE 0.055500000715255737 9 +1 1 CAL_MAG0_ZODIAG -0.007000000216066837 9 +1 1 CAL_MAG0_ZOFF -0.107400000095367432 9 +1 1 CAL_MAG0_ZSCALE 1.048200011253356934 9 1 1 CAL_MAG1_ID 0 6 1 1 CAL_MAG1_ROT -1 6 1 1 CAL_MAG2_ID 0 6 @@ -632,10 +632,10 @@ 1 1 RC11_REV 1.000000000000000000 9 1 1 RC11_TRIM 1500.000000000000000000 9 1 1 RC12_DZ 0.000000000000000000 9 -1 1 RC12_MAX 1988.000000000000000000 9 -1 1 RC12_MIN 1011.000000000000000000 9 +1 1 RC12_MAX 2000.000000000000000000 9 +1 1 RC12_MIN 1000.000000000000000000 9 1 1 RC12_REV 1.000000000000000000 9 -1 1 RC12_TRIM 1499.000000000000000000 9 +1 1 RC12_TRIM 1500.000000000000000000 9 1 1 RC13_DZ 0.000000000000000000 9 1 1 RC13_MAX 2000.000000000000000000 9 1 1 RC13_MIN 1000.000000000000000000 9 @@ -668,44 +668,44 @@ 1 1 RC18_TRIM 1500.000000000000000000 9 1 1 RC1_DZ 10.000000000000000000 9 1 1 RC1_MAX 2000.000000000000000000 9 -1 1 RC1_MIN 1000.000000000000000000 9 +1 1 RC1_MIN 1001.000000000000000000 9 1 1 RC1_REV 1.000000000000000000 9 -1 1 RC1_TRIM 1500.000000000000000000 9 +1 1 RC1_TRIM 1499.000000000000000000 9 1 1 RC2_DZ 10.000000000000000000 9 1 1 RC2_MAX 2000.000000000000000000 9 -1 1 RC2_MIN 1000.000000000000000000 9 +1 1 RC2_MIN 1001.000000000000000000 9 1 1 RC2_REV 1.000000000000000000 9 -1 1 RC2_TRIM 1500.000000000000000000 9 +1 1 RC2_TRIM 1501.000000000000000000 9 1 1 RC3_DZ 10.000000000000000000 9 1 1 RC3_MAX 2000.000000000000000000 9 -1 1 RC3_MIN 1000.000000000000000000 9 +1 1 RC3_MIN 1001.000000000000000000 9 1 1 RC3_REV 1.000000000000000000 9 -1 1 RC3_TRIM 1500.000000000000000000 9 +1 1 RC3_TRIM 1001.000000000000000000 9 1 1 RC4_DZ 10.000000000000000000 9 1 1 RC4_MAX 2000.000000000000000000 9 -1 1 RC4_MIN 1000.000000000000000000 9 +1 1 RC4_MIN 1001.000000000000000000 9 1 1 RC4_REV 1.000000000000000000 9 -1 1 RC4_TRIM 1500.000000000000000000 9 +1 1 RC4_TRIM 1507.000000000000000000 9 1 1 RC5_DZ 10.000000000000000000 9 1 1 RC5_MAX 1988.000000000000000000 9 1 1 RC5_MIN 1011.000000000000000000 9 1 1 RC5_REV 1.000000000000000000 9 -1 1 RC5_TRIM 1500.000000000000000000 9 +1 1 RC5_TRIM 1499.000000000000000000 9 1 1 RC6_DZ 10.000000000000000000 9 1 1 RC6_MAX 1988.000000000000000000 9 1 1 RC6_MIN 1011.000000000000000000 9 1 1 RC6_REV 1.000000000000000000 9 -1 1 RC6_TRIM 1500.000000000000000000 9 +1 1 RC6_TRIM 1499.000000000000000000 9 1 1 RC7_DZ 10.000000000000000000 9 1 1 RC7_MAX 1988.000000000000000000 9 1 1 RC7_MIN 1011.000000000000000000 9 1 1 RC7_REV 1.000000000000000000 9 -1 1 RC7_TRIM 1500.000000000000000000 9 +1 1 RC7_TRIM 1499.000000000000000000 9 1 1 RC8_DZ 10.000000000000000000 9 1 1 RC8_MAX 1988.000000000000000000 9 1 1 RC8_MIN 1011.000000000000000000 9 1 1 RC8_REV 1.000000000000000000 9 -1 1 RC8_TRIM 1500.000000000000000000 9 +1 1 RC8_TRIM 1499.000000000000000000 9 1 1 RC9_DZ 0.000000000000000000 9 1 1 RC9_MAX 2000.000000000000000000 9 1 1 RC9_MIN 1000.000000000000000000 9 @@ -774,8 +774,8 @@ 1 1 SENS_BARO_QNH 1013.250000000000000000 9 1 1 SENS_BARO_RATE 20.000000000000000000 9 1 1 SENS_BOARD_ROT 0 6 -1 1 SENS_BOARD_X_OFF -0.067400000989437103 9 -1 1 SENS_BOARD_Y_OFF -0.318699985742568970 9 +1 1 SENS_BOARD_X_OFF -0.587000012397766113 9 +1 1 SENS_BOARD_Y_OFF -0.263300001621246338 9 1 1 SENS_BOARD_Z_OFF 0.000000000000000000 9 1 1 SENS_DPRES_OFF 0.000000000000000000 9 1 1 SENS_GPS_MASK 7 6 -
Timeline for open-vins documentationnote when dumping the same params on the another starling v2 drone i'm getting a slightly different set of params, which i have no idea why it is.
# Onboard parameters for Vehicle 1 # # Stack: PX4 Pro # Vehicle: Multi-Rotor # Version: 1.14.0 dev # Git Revision: 70d986f08a020054 # # Vehicle-Id Component-Id Name Value Type 1 1 ASPD_SCALE_1 1.000000000000000000 9 1 1 BAT1_CAPACITY 3950.000000000000000000 9 1 1 BAT1_N_CELLS 2 6 1 1 BAT1_R_INTERNAL 0.021999999880790710 9 1 1 BAT1_SOURCE 0 6 1 1 BAT1_V_CHARGED 4.099999904632568359 9 1 1 BAT1_V_EMPTY 2.799999952316284180 9 1 1 BAT1_V_LOAD_DROP 0.100000001490116119 9 1 1 BAT_AVRG_CURRENT 4.300000190734863281 9 1 1 BAT_CRIT_THR 0.100000001490116119 9 1 1 BAT_EMERGEN_THR 0.050000000745058060 9 1 1 BAT_LOW_THR 0.150000005960464478 9 1 1 BAT_N_CELLS 3 6 1 1 BAT_V_CHARGED 4.050000190734863281 9 1 1 BAT_V_EMPTY 3.599999904632568359 9 1 1 BAT_V_LOAD_DROP 0.300000011920928955 9 1 1 CAL_ACC0_ID 2490378 6 1 1 CAL_ACC0_PRIO 50 6 1 1 CAL_ACC0_ROT -1 6 1 1 CAL_ACC0_XOFF -0.041400000452995300 9 1 1 CAL_ACC0_XSCALE 1.000000000000000000 9 1 1 CAL_ACC0_YOFF -0.014000000432133675 9 1 1 CAL_ACC0_YSCALE 1.000000000000000000 9 1 1 CAL_ACC0_ZOFF -0.050900001078844070 9 1 1 CAL_ACC0_ZSCALE 1.000000000000000000 9 1 1 CAL_ACC1_ID 0 6 1 1 CAL_ACC2_ID 0 6 1 1 CAL_ACC3_ID 0 6 1 1 CAL_AIR_CMODEL 0 6 1 1 CAL_AIR_TUBED_MM 1.500000000000000000 9 1 1 CAL_AIR_TUBELEN 0.200000002980232239 9 1 1 CAL_BARO0_ID 0 6 1 1 CAL_BARO1_ID 0 6 1 1 CAL_BARO2_ID 0 6 1 1 CAL_BARO3_ID 0 6 1 1 CAL_GYRO0_ID 2490378 6 1 1 CAL_GYRO0_PRIO 50 6 1 1 CAL_GYRO0_ROT -1 6 1 1 CAL_GYRO0_XOFF 0.001399999950081110 9 1 1 CAL_GYRO0_YOFF 0.019099999219179153 9 1 1 CAL_GYRO0_ZOFF -0.001799999969080091 9 1 1 CAL_GYRO1_ID 0 6 1 1 CAL_GYRO2_ID 0 6 1 1 CAL_GYRO3_ID 0 6 1 1 CAL_MAG0_ID 527625 6 1 1 CAL_MAG0_PRIO 75 6 1 1 CAL_MAG0_ROT 0 6 1 1 CAL_MAG0_XCOMP 0.000000000000000000 9 1 1 CAL_MAG0_XODIAG -0.027599999681115150 9 1 1 CAL_MAG0_XOFF -0.093400001525878906 9 1 1 CAL_MAG0_XSCALE 1.085199952125549316 9 1 1 CAL_MAG0_YCOMP 0.000000000000000000 9 1 1 CAL_MAG0_YODIAG 0.014800000004470348 9 1 1 CAL_MAG0_YOFF 0.249599993228912354 9 1 1 CAL_MAG0_YSCALE 0.836799979209899902 9 1 1 CAL_MAG0_ZCOMP 0.000000000000000000 9 1 1 CAL_MAG0_ZODIAG -0.007000000216066837 9 1 1 CAL_MAG0_ZOFF -0.107400000095367432 9 1 1 CAL_MAG0_ZSCALE 1.048200011253356934 9 1 1 CAL_MAG1_ID 0 6 1 1 CAL_MAG1_ROT -1 6 1 1 CAL_MAG2_ID 0 6 1 1 CAL_MAG2_ROT -1 6 1 1 CAL_MAG3_ID 0 6 1 1 CAL_MAG3_ROT -1 6 1 1 CAL_MAG_COMP_TYP 0 6 1 1 CAL_MAG_SIDES 63 6 1 1 CA_AIRFRAME 0 6 1 1 CA_FAILURE_MODE 0 6 1 1 CA_METHOD 2 6 1 1 CA_R0_SLEW 0.000000000000000000 9 1 1 CA_R10_SLEW 0.000000000000000000 9 1 1 CA_R11_SLEW 0.000000000000000000 9 1 1 CA_R1_SLEW 0.000000000000000000 9 1 1 CA_R2_SLEW 0.000000000000000000 9 1 1 CA_R3_SLEW 0.000000000000000000 9 1 1 CA_R4_SLEW 0.000000000000000000 9 1 1 CA_R5_SLEW 0.000000000000000000 9 1 1 CA_R6_SLEW 0.000000000000000000 9 1 1 CA_R7_SLEW 0.000000000000000000 9 1 1 CA_R8_SLEW 0.000000000000000000 9 1 1 CA_R9_SLEW 0.000000000000000000 9 1 1 CA_ROTOR0_AX 0.000000000000000000 9 1 1 CA_ROTOR0_AY 0.000000000000000000 9 1 1 CA_ROTOR0_AZ -1.000000000000000000 9 1 1 CA_ROTOR0_CT 6.500000000000000000 9 1 1 CA_ROTOR0_KM 0.050000000745058060 9 1 1 CA_ROTOR0_PX 0.085000000894069672 9 1 1 CA_ROTOR0_PY 0.062500000000000000 9 1 1 CA_ROTOR0_PZ 0.000000000000000000 9 1 1 CA_ROTOR10_AX 0.000000000000000000 9 1 1 CA_ROTOR10_AY 0.000000000000000000 9 1 1 CA_ROTOR10_AZ -1.000000000000000000 9 1 1 CA_ROTOR10_CT 6.500000000000000000 9 1 1 CA_ROTOR10_KM 0.050000000745058060 9 1 1 CA_ROTOR10_PX 0.000000000000000000 9 1 1 CA_ROTOR10_PY 0.000000000000000000 9 1 1 CA_ROTOR10_PZ 0.000000000000000000 9 1 1 CA_ROTOR11_AX 0.000000000000000000 9 1 1 CA_ROTOR11_AY 0.000000000000000000 9 1 1 CA_ROTOR11_AZ -1.000000000000000000 9 1 1 CA_ROTOR11_CT 6.500000000000000000 9 1 1 CA_ROTOR11_KM 0.050000000745058060 9 1 1 CA_ROTOR11_PX 0.000000000000000000 9 1 1 CA_ROTOR11_PY 0.000000000000000000 9 1 1 CA_ROTOR11_PZ 0.000000000000000000 9 1 1 CA_ROTOR1_AX 0.000000000000000000 9 1 1 CA_ROTOR1_AY 0.000000000000000000 9 1 1 CA_ROTOR1_AZ -1.000000000000000000 9 1 1 CA_ROTOR1_CT 6.500000000000000000 9 1 1 CA_ROTOR1_KM 0.050000000745058060 9 1 1 CA_ROTOR1_PX -0.085000000894069672 9 1 1 CA_ROTOR1_PY -0.062500000000000000 9 1 1 CA_ROTOR1_PZ 0.000000000000000000 9 1 1 CA_ROTOR2_AX 0.000000000000000000 9 1 1 CA_ROTOR2_AY 0.000000000000000000 9 1 1 CA_ROTOR2_AZ -1.000000000000000000 9 1 1 CA_ROTOR2_CT 6.500000000000000000 9 1 1 CA_ROTOR2_KM -0.050000000745058060 9 1 1 CA_ROTOR2_PX 0.085000000894069672 9 1 1 CA_ROTOR2_PY -0.062500000000000000 9 1 1 CA_ROTOR2_PZ 0.000000000000000000 9 1 1 CA_ROTOR3_AX 0.000000000000000000 9 1 1 CA_ROTOR3_AY 0.000000000000000000 9 1 1 CA_ROTOR3_AZ -1.000000000000000000 9 1 1 CA_ROTOR3_CT 6.500000000000000000 9 1 1 CA_ROTOR3_KM -0.050000000745058060 9 1 1 CA_ROTOR3_PX -0.085000000894069672 9 1 1 CA_ROTOR3_PY 0.062500000000000000 9 1 1 CA_ROTOR3_PZ 0.000000000000000000 9 1 1 CA_ROTOR4_AX 0.000000000000000000 9 1 1 CA_ROTOR4_AY 0.000000000000000000 9 1 1 CA_ROTOR4_AZ -1.000000000000000000 9 1 1 CA_ROTOR4_CT 6.500000000000000000 9 1 1 CA_ROTOR4_KM 0.050000000745058060 9 1 1 CA_ROTOR4_PX 0.000000000000000000 9 1 1 CA_ROTOR4_PY 0.000000000000000000 9 1 1 CA_ROTOR4_PZ 0.000000000000000000 9 1 1 CA_ROTOR5_AX 0.000000000000000000 9 1 1 CA_ROTOR5_AY 0.000000000000000000 9 1 1 CA_ROTOR5_AZ -1.000000000000000000 9 1 1 CA_ROTOR5_CT 6.500000000000000000 9 1 1 CA_ROTOR5_KM 0.050000000745058060 9 1 1 CA_ROTOR5_PX 0.000000000000000000 9 1 1 CA_ROTOR5_PY 0.000000000000000000 9 1 1 CA_ROTOR5_PZ 0.000000000000000000 9 1 1 CA_ROTOR6_AX 0.000000000000000000 9 1 1 CA_ROTOR6_AY 0.000000000000000000 9 1 1 CA_ROTOR6_AZ -1.000000000000000000 9 1 1 CA_ROTOR6_CT 6.500000000000000000 9 1 1 CA_ROTOR6_KM 0.050000000745058060 9 1 1 CA_ROTOR6_PX 0.000000000000000000 9 1 1 CA_ROTOR6_PY 0.000000000000000000 9 1 1 CA_ROTOR6_PZ 0.000000000000000000 9 1 1 CA_ROTOR7_AX 0.000000000000000000 9 1 1 CA_ROTOR7_AY 0.000000000000000000 9 1 1 CA_ROTOR7_AZ -1.000000000000000000 9 1 1 CA_ROTOR7_CT 6.500000000000000000 9 1 1 CA_ROTOR7_KM 0.050000000745058060 9 1 1 CA_ROTOR7_PX 0.000000000000000000 9 1 1 CA_ROTOR7_PY 0.000000000000000000 9 1 1 CA_ROTOR7_PZ 0.000000000000000000 9 1 1 CA_ROTOR8_AX 0.000000000000000000 9 1 1 CA_ROTOR8_AY 0.000000000000000000 9 1 1 CA_ROTOR8_AZ -1.000000000000000000 9 1 1 CA_ROTOR8_CT 6.500000000000000000 9 1 1 CA_ROTOR8_KM 0.050000000745058060 9 1 1 CA_ROTOR8_PX 0.000000000000000000 9 1 1 CA_ROTOR8_PY 0.000000000000000000 9 1 1 CA_ROTOR8_PZ 0.000000000000000000 9 1 1 CA_ROTOR9_AX 0.000000000000000000 9 1 1 CA_ROTOR9_AY 0.000000000000000000 9 1 1 CA_ROTOR9_AZ -1.000000000000000000 9 1 1 CA_ROTOR9_CT 6.500000000000000000 9 1 1 CA_ROTOR9_KM 0.050000000745058060 9 1 1 CA_ROTOR9_PX 0.000000000000000000 9 1 1 CA_ROTOR9_PY 0.000000000000000000 9 1 1 CA_ROTOR9_PZ 0.000000000000000000 9 1 1 CA_ROTOR_COUNT 4 6 1 1 CA_R_REV 0 6 1 1 CA_SV0_SLEW 0.000000000000000000 9 1 1 CA_SV1_SLEW 0.000000000000000000 9 1 1 CA_SV2_SLEW 0.000000000000000000 9 1 1 CA_SV3_SLEW 0.000000000000000000 9 1 1 CA_SV4_SLEW 0.000000000000000000 9 1 1 CA_SV5_SLEW 0.000000000000000000 9 1 1 CA_SV6_SLEW 0.000000000000000000 9 1 1 CA_SV7_SLEW 0.000000000000000000 9 1 1 CBRK_AIRSPD_CHK 0 6 1 1 CBRK_FLIGHTTERM 121212 6 1 1 CBRK_IO_SAFETY 22027 6 1 1 CBRK_SUPPLY_CHK 894281 6 1 1 CBRK_USB_CHK 197848 6 1 1 CBRK_VTOLARMING 0 6 1 1 COM_ACT_FAIL_ACT 0 6 1 1 COM_ARM_ARSP_EN 1 6 1 1 COM_ARM_AUTH_ID 10 6 1 1 COM_ARM_AUTH_MET 0 6 1 1 COM_ARM_AUTH_REQ 0 6 1 1 COM_ARM_AUTH_TO 1.000000000000000000 9 1 1 COM_ARM_BAD_INOV 0 6 1 1 COM_ARM_CHK_ESCS 0 6 1 1 COM_ARM_EKF_BIAS 3.000000000000000000 9 1 1 COM_ARM_EKF_HGT 1.000000000000000000 9 1 1 COM_ARM_EKF_POS 0.500000000000000000 9 1 1 COM_ARM_EKF_VEL 0.500000000000000000 9 1 1 COM_ARM_EKF_YAW 0.500000000000000000 9 1 1 COM_ARM_HFLT_CHK 1 6 1 1 COM_ARM_IMU_ACC 0.699999988079071045 9 1 1 COM_ARM_IMU_GYR 0.250000000000000000 9 1 1 COM_ARM_MAG_ANG 60 6 1 1 COM_ARM_MAG_STR 2 6 1 1 COM_ARM_MIS_REQ 0 6 1 1 COM_ARM_ODID 0 6 1 1 COM_ARM_SDCARD 0 6 1 1 COM_ARM_SWISBTN 0 6 1 1 COM_ARM_WO_GPS 1 6 1 1 COM_CPU_MAX -1.000000000000000000 9 1 1 COM_DISARM_FORCE 0 6 1 1 COM_DISARM_LAND 0.100000001490116119 9 1 1 COM_DISARM_PRFLT 20.000000000000000000 9 1 1 COM_DL_LOSS_T 10 6 1 1 COM_FAIL_ACT_T 5.000000000000000000 9 1 1 COM_FLIGHT_UUID 0 6 1 1 COM_FLTMODE1 0 6 1 1 COM_FLTMODE2 0 6 1 1 COM_FLTMODE3 2 6 1 1 COM_FLTMODE4 2 6 1 1 COM_FLTMODE5 7 6 1 1 COM_FLTMODE6 7 6 1 1 COM_FLT_PROFILE 0 6 1 1 COM_FLT_TIME_MAX -1 6 1 1 COM_FORCE_SAFETY 0 6 1 1 COM_HLDL_LOSS_T 120 6 1 1 COM_HLDL_REG_T 0 6 1 1 COM_HOME_EN 1 6 1 1 COM_HOME_IN_AIR 0 6 1 1 COM_IMB_PROP_ACT 0 6 1 1 COM_KILL_DISARM 0.000000000000000000 9 1 1 COM_LKDOWN_TKO 3.000000000000000000 9 1 1 COM_LOW_BAT_ACT 0 6 1 1 COM_MOT_TEST_EN 1 6 1 1 COM_OBC_LOSS_T 5.000000000000000000 9 1 1 COM_OBL_RC_ACT 0 6 1 1 COM_OBS_AVOID 0 6 1 1 COM_OF_LOSS_T 1.000000000000000000 9 1 1 COM_PARACHUTE 0 6 1 1 COM_POSCTL_NAVL 0 6 1 1 COM_POS_FS_DELAY 1 6 1 1 COM_POS_FS_EPH 5.000000000000000000 9 1 1 COM_POS_LOW_EPH -1.000000000000000000 9 1 1 COM_POWER_COUNT 1 6 1 1 COM_PREARM_MODE 0 6 1 1 COM_QC_ACT 0 6 1 1 COM_RCL_EXCEPT 0 6 1 1 COM_RC_ARM_HYST 1000 6 1 1 COM_RC_IN_MODE 3 6 1 1 COM_RC_LOSS_T 0.500000000000000000 9 1 1 COM_RC_OVERRIDE 1 6 1 1 COM_RC_STICK_OV 30.000000000000000000 9 1 1 COM_SPOOLUP_TIME 2.000000000000000000 9 1 1 COM_TAKEOFF_ACT 0 6 1 1 COM_VEL_FS_EVH 1.000000000000000000 9 1 1 COM_WIND_MAX -1.000000000000000000 9 1 1 COM_WIND_WARN -1.000000000000000000 9 1 1 CP_DELAY 0.400000005960464478 9 1 1 CP_DIST -1.000000000000000000 9 1 1 CP_GO_NO_DATA 0 6 1 1 CP_GUIDE_ANG 30.000000000000000000 9 1 1 EKF2_ABIAS_INIT 0.200000002980232239 9 1 1 EKF2_ABL_ACCLIM 25.000000000000000000 9 1 1 EKF2_ABL_GYRLIM 3.000000000000000000 9 1 1 EKF2_ABL_LIM 0.400000005960464478 9 1 1 EKF2_ABL_TAU 0.500000000000000000 9 1 1 EKF2_ACC_B_NOISE 0.003000000026077032 9 1 1 EKF2_ACC_NOISE 0.349999994039535522 9 1 1 EKF2_AID_MASK 0 6 1 1 EKF2_ANGERR_INIT 0.100000001490116119 9 1 1 EKF2_ARSP_THR 0.000000000000000000 9 1 1 EKF2_ASPD_MAX 20.000000000000000000 9 1 1 EKF2_ASP_DELAY 100.000000000000000000 9 1 1 EKF2_AVEL_DELAY 5.000000000000000000 9 1 1 EKF2_BARO_CTRL 1 6 1 1 EKF2_BARO_DELAY 0.000000000000000000 9 1 1 EKF2_BARO_GATE 5.000000000000000000 9 1 1 EKF2_BARO_NOISE 3.500000000000000000 9 1 1 EKF2_BCOEF_X 100.000000000000000000 9 1 1 EKF2_BCOEF_Y 100.000000000000000000 9 1 1 EKF2_BETA_GATE 5.000000000000000000 9 1 1 EKF2_BETA_NOISE 0.300000011920928955 9 1 1 EKF2_DECL_TYPE 7 6 1 1 EKF2_DRAG_CTRL 0 6 1 1 EKF2_DRAG_NOISE 2.500000000000000000 9 1 1 EKF2_EAS_NOISE 1.399999976158142090 9 1 1 EKF2_EVA_NOISE 0.100000001490116119 9 1 1 EKF2_EVP_GATE 5.000000000000000000 9 1 1 EKF2_EVP_NOISE 0.100000001490116119 9 1 1 EKF2_EVV_GATE 3.000000000000000000 9 1 1 EKF2_EVV_NOISE 0.100000001490116119 9 1 1 EKF2_EV_CTRL 15 6 1 1 EKF2_EV_DELAY 0.000000000000000000 9 1 1 EKF2_EV_HGT_TO 5000 6 1 1 EKF2_EV_NOISE_MD 0 6 1 1 EKF2_EV_POS_TO 1000 6 1 1 EKF2_EV_POS_X 0.000000000000000000 9 1 1 EKF2_EV_POS_Y 0.000000000000000000 9 1 1 EKF2_EV_POS_Z 0.000000000000000000 9 1 1 EKF2_EV_QMIN 1 6 1 1 EKF2_FUSE_BETA 0 6 1 1 EKF2_GBIAS_INIT 0.100000001490116119 9 1 1 EKF2_GND_EFF_DZ 4.000000000000000000 9 1 1 EKF2_GND_MAX_HGT 0.500000000000000000 9 1 1 EKF2_GPS_CHECK 245 6 1 1 EKF2_GPS_CTRL 0 6 1 1 EKF2_GPS_DELAY 110.000000000000000000 9 1 1 EKF2_GPS_POS_X 0.000000000000000000 9 1 1 EKF2_GPS_POS_Y 0.000000000000000000 9 1 1 EKF2_GPS_POS_Z 0.000000000000000000 9 1 1 EKF2_GPS_P_GATE 5.000000000000000000 9 1 1 EKF2_GPS_P_NOISE 0.500000000000000000 9 1 1 EKF2_GPS_V_GATE 5.000000000000000000 9 1 1 EKF2_GPS_V_NOISE 0.300000011920928955 9 1 1 EKF2_GRAV_NOISE 1.000000000000000000 9 1 1 EKF2_GSF_TAS 15.000000000000000000 9 1 1 EKF2_GYR_B_LIM 0.150000005960464478 9 1 1 EKF2_GYR_B_NOISE 0.001000000047497451 9 1 1 EKF2_GYR_NOISE 0.014999999664723873 9 1 1 EKF2_HDG_GATE 2.599999904632568359 9 1 1 EKF2_HEAD_NOISE 0.300000011920928955 9 1 1 EKF2_HGT_REF 3 6 1 1 EKF2_IMU_CTRL 3 6 1 1 EKF2_IMU_POS_X 0.004300000146031380 9 1 1 EKF2_IMU_POS_Y 0.007300000172108412 9 1 1 EKF2_IMU_POS_Z -0.016000000759959221 9 1 1 EKF2_MAG_ACCLIM 0.500000000000000000 9 1 1 EKF2_MAG_B_NOISE 0.000099999997473788 9 1 1 EKF2_MAG_CHECK 1 6 1 1 EKF2_MAG_DECL 0.000000000000000000 9 1 1 EKF2_MAG_DELAY 0.000000000000000000 9 1 1 EKF2_MAG_E_NOISE 0.001000000047497451 9 1 1 EKF2_MAG_GATE 3.000000000000000000 9 1 1 EKF2_MAG_NOISE 0.050000000745058060 9 1 1 EKF2_MAG_TYPE 5 6 1 1 EKF2_MAG_YAWLIM 0.200000002980232239 9 1 1 EKF2_MCOEF 0.150000005960464478 9 1 1 EKF2_MIN_RNG 0.100000001490116119 9 1 1 EKF2_NOAID_NOISE 10.000000000000000000 9 1 1 EKF2_NOAID_TOUT 5000000 6 1 1 EKF2_OF_CTRL 0 6 1 1 EKF2_OF_DELAY 20.000000000000000000 9 1 1 EKF2_OF_GATE 3.000000000000000000 9 1 1 EKF2_OF_N_MAX 0.500000000000000000 9 1 1 EKF2_OF_N_MIN 0.150000005960464478 9 1 1 EKF2_OF_POS_X 0.000000000000000000 9 1 1 EKF2_OF_POS_Y 0.000000000000000000 9 1 1 EKF2_OF_POS_Z 0.000000000000000000 9 1 1 EKF2_OF_QMIN 1 6 1 1 EKF2_PCOEF_XN 0.000000000000000000 9 1 1 EKF2_PCOEF_XP 0.000000000000000000 9 1 1 EKF2_PCOEF_YN 0.000000000000000000 9 1 1 EKF2_PCOEF_YP 0.000000000000000000 9 1 1 EKF2_PCOEF_Z 0.000000000000000000 9 1 1 EKF2_PREDICT_US 10000 6 1 1 EKF2_REQ_EPH 3.000000000000000000 9 1 1 EKF2_REQ_EPV 5.000000000000000000 9 1 1 EKF2_REQ_GPS_H 5.000000000000000000 9 1 1 EKF2_REQ_HDRIFT 0.100000001490116119 9 1 1 EKF2_REQ_NSATS 6 6 1 1 EKF2_REQ_PDOP 2.500000000000000000 9 1 1 EKF2_REQ_SACC 1.500000000000000000 9 1 1 EKF2_REQ_VDRIFT 0.200000002980232239 9 1 1 EKF2_RNG_A_HMAX 5.000000000000000000 9 1 1 EKF2_RNG_A_IGATE 1.000000000000000000 9 1 1 EKF2_RNG_A_VMAX 1.000000000000000000 9 1 1 EKF2_RNG_CTRL 0 6 1 1 EKF2_RNG_DELAY 5.000000000000000000 9 1 1 EKF2_RNG_GATE 5.000000000000000000 9 1 1 EKF2_RNG_K_GATE 1.000000000000000000 9 1 1 EKF2_RNG_NOISE 0.100000001490116119 9 1 1 EKF2_RNG_PITCH 0.000000000000000000 9 1 1 EKF2_RNG_POS_X 0.000000000000000000 9 1 1 EKF2_RNG_POS_Y 0.000000000000000000 9 1 1 EKF2_RNG_POS_Z 0.000000000000000000 9 1 1 EKF2_RNG_QLTY_T 1.000000000000000000 9 1 1 EKF2_RNG_SFE 0.050000000745058060 9 1 1 EKF2_SYNT_MAG_Z 0 6 1 1 EKF2_TAS_GATE 3.000000000000000000 9 1 1 EKF2_TAU_POS 0.250000000000000000 9 1 1 EKF2_TAU_VEL 0.250000000000000000 9 1 1 EKF2_TERR_GRAD 0.500000000000000000 9 1 1 EKF2_TERR_MASK 3 6 1 1 EKF2_TERR_NOISE 5.000000000000000000 9 1 1 EKF2_WIND_NSD 0.009999999776482582 9 1 1 FD_ACT_EN 1 6 1 1 FD_ACT_MOT_C2T 2.000000000000000000 9 1 1 FD_ACT_MOT_THR 0.200000002980232239 9 1 1 FD_ACT_MOT_TOUT 100 6 1 1 FD_ESCS_EN 1 6 1 1 FD_EXT_ATS_EN 0 6 1 1 FD_EXT_ATS_TRIG 1900 6 1 1 FD_FAIL_P 60 6 1 1 FD_FAIL_P_TTRI 0.300000011920928955 9 1 1 FD_FAIL_R 60 6 1 1 FD_FAIL_R_TTRI 0.300000011920928955 9 1 1 FD_IMB_PROP_THR 30 6 1 1 FLW_TGT_ALT_M 0 6 1 1 FLW_TGT_DST 8.000000000000000000 9 1 1 FLW_TGT_FA 180.000000000000000000 9 1 1 FLW_TGT_HT 8.000000000000000000 9 1 1 FLW_TGT_MAX_VEL 5.000000000000000000 9 1 1 FLW_TGT_RS 0.100000001490116119 9 1 1 FW_AIRSPD_MAX 20.000000000000000000 9 1 1 FW_AIRSPD_TRIM 15.000000000000000000 9 1 1 FW_ARSP_MODE 0 6 1 1 FW_PSP_OFF 0.000000000000000000 9 1 1 FW_T_CLMB_R_SP 3.000000000000000000 9 1 1 FW_T_SINK_R_SP 2.000000000000000000 9 1 1 GF_ACTION 2 6 1 1 GF_ALTMODE 0 6 1 1 GF_COUNT -1 6 1 1 GF_MAX_HOR_DIST 0.000000000000000000 9 1 1 GF_MAX_VER_DIST 0.000000000000000000 9 1 1 GF_PREDICT 0 6 1 1 GF_SOURCE 0 6 1 1 GND_SPEED_THR_SC 1.000000000000000000 9 1 1 GPIO_CTL_CH 0 6 1 1 GPS_1_GNSS 0 6 1 1 GPS_1_PROTOCOL 1 6 1 1 GPS_DUMP_COMM 0 6 1 1 GPS_PITCH_OFFSET 0.000000000000000000 9 1 1 GPS_SAT_INFO 0 6 1 1 GPS_UBX_BAUD2 230400 6 1 1 GPS_UBX_CFG_INTF 0 6 1 1 GPS_UBX_DYNMODEL 7 6 1 1 GPS_UBX_MODE 0 6 1 1 GPS_YAW_OFFSET 0.000000000000000000 9 1 1 HTE_ACC_GATE 3.000000000000000000 9 1 1 HTE_HT_ERR_INIT 0.100000001490116119 9 1 1 HTE_HT_NOISE 0.003599999938160181 9 1 1 HTE_THR_RANGE 0.200000002980232239 9 1 1 HTE_VXY_THR 10.000000000000000000 9 1 1 HTE_VZ_THR 2.000000000000000000 9 1 1 IMU_ACCEL_CUTOFF 80.000000000000000000 9 1 1 IMU_DGYRO_CUTOFF 60.000000000000000000 9 1 1 IMU_GYRO_CUTOFF 80.000000000000000000 9 1 1 IMU_GYRO_DNF_BW 15.000000000000000000 9 1 1 IMU_GYRO_DNF_EN 1 6 1 1 IMU_GYRO_DNF_HMC 3 6 1 1 IMU_GYRO_DNF_MIN 25.000000000000000000 9 1 1 IMU_GYRO_NF0_BW 20.000000000000000000 9 1 1 IMU_GYRO_NF0_FRQ 0.000000000000000000 9 1 1 IMU_GYRO_NF1_BW 20.000000000000000000 9 1 1 IMU_GYRO_NF1_FRQ 0.000000000000000000 9 1 1 IMU_GYRO_RATEMAX 800 6 1 1 IMU_INTEG_RATE 200 6 1 1 LNDMC_ALT_GND 2.000000000000000000 9 1 1 LNDMC_ALT_MAX -1.000000000000000000 9 1 1 LNDMC_ROT_MAX 30.000000000000000000 9 1 1 LNDMC_TRIG_TIME 0.500000000000000000 9 1 1 LNDMC_XY_VEL_MAX 1.500000000000000000 9 1 1 LNDMC_Z_VEL_MAX 0.250000000000000000 9 1 1 LND_FLIGHT_T_HI 0 6 1 1 LND_FLIGHT_T_LO 0 6 1 1 MAN_ARM_GESTURE 1 6 1 1 MAV_COMP_ID 1 6 1 1 MAV_FWDEXTSP 1 6 1 1 MAV_HASH_CHK_EN 1 6 1 1 MAV_HB_FORW_EN 1 6 1 1 MAV_PROTO_VER 0 6 1 1 MAV_RADIO_TOUT 5 6 1 1 MAV_SIK_RADIO_ID 0 6 1 1 MAV_SYS_ID 1 6 1 1 MAV_TYPE 2 6 1 1 MAV_USEHILGPS 0 6 1 1 MC_ACRO_EXPO 0.689999997615814209 9 1 1 MC_ACRO_EXPO_Y 0.689999997615814209 9 1 1 MC_ACRO_P_MAX 720.000000000000000000 9 1 1 MC_ACRO_R_MAX 720.000000000000000000 9 1 1 MC_ACRO_SUPEXPO 0.699999988079071045 9 1 1 MC_ACRO_SUPEXPOY 0.699999988079071045 9 1 1 MC_ACRO_Y_MAX 540.000000000000000000 9 1 1 MC_AIRMODE 0 6 1 1 MC_AT_APPLY 1 6 1 1 MC_AT_AXES 3 6 1 1 MC_AT_RISE_TIME 0.140000000596046448 9 1 1 MC_AT_START 0 6 1 1 MC_AT_SYSID_AMP 0.699999988079071045 9 1 1 MC_BAT_SCALE_EN 0 6 1 1 MC_INJECT_AMP 0.050000000745058060 9 1 1 MC_INJECT_CNT 12 6 1 1 MC_INJECT_EN 0 6 1 1 MC_INJECT_INC 1.000000000000000000 9 1 1 MC_INJECT_REST_T 1.000000000000000000 9 1 1 MC_INJECT_RPY 2 6 1 1 MC_INJECT_SINE_T 5.000000000000000000 9 1 1 MC_INJECT_START 3.000000000000000000 9 1 1 MC_MAN_TILT_TAU 0.000000000000000000 9 1 1 MC_ORBIT_RAD_MAX 1000.000000000000000000 9 1 1 MC_PITCHRATE_D 0.001099999994039536 9 1 1 MC_PITCHRATE_FF 0.000000000000000000 9 1 1 MC_PITCHRATE_I 0.228000000119209290 9 1 1 MC_PITCHRATE_K 1.000000000000000000 9 1 1 MC_PITCHRATE_MAX 130.000000000000000000 9 1 1 MC_PITCHRATE_P 0.097000002861022949 9 1 1 MC_PITCH_CUTOFF 30.000000000000000000 9 1 1 MC_PITCH_P 16.000000000000000000 9 1 1 MC_PR_INT_LIM 0.300000011920928955 9 1 1 MC_ROLLRATE_D 0.000899999984540045 9 1 1 MC_ROLLRATE_FF 0.000000000000000000 9 1 1 MC_ROLLRATE_I 0.171000003814697266 9 1 1 MC_ROLLRATE_K 1.000000000000000000 9 1 1 MC_ROLLRATE_MAX 130.000000000000000000 9 1 1 MC_ROLLRATE_P 0.071999996900558472 9 1 1 MC_ROLL_CUTOFF 30.000000000000000000 9 1 1 MC_ROLL_P 16.000000000000000000 9 1 1 MC_RR_INT_LIM 0.300000011920928955 9 1 1 MC_THR_CURVE_ACR 0 6 1 1 MC_YAWRATE_D 0.000000000000000000 9 1 1 MC_YAWRATE_FF 0.000000000000000000 9 1 1 MC_YAWRATE_I 0.500000000000000000 9 1 1 MC_YAWRATE_K 1.000000000000000000 9 1 1 MC_YAWRATE_MAX 150.000000000000000000 9 1 1 MC_YAWRATE_P 0.150000005960464478 9 1 1 MC_YAW_CUTOFF 10.000000000000000000 9 1 1 MC_YAW_P 2.799999952316284180 9 1 1 MC_YAW_WEIGHT 0.400000005960464478 9 1 1 MC_YR_INT_LIM 0.300000011920928955 9 1 1 MIS_DIST_1WP 900.000000000000000000 9 1 1 MIS_LND_ABRT_ALT 30 6 1 1 MIS_MNT_YAW_CTL 0 6 1 1 MIS_PD_TO 5.000000000000000000 9 1 1 MIS_TAKEOFF_ALT 2.500000000000000000 9 1 1 MIS_TKO_LAND_REQ 0 6 1 1 MIS_YAW_ERR 12.000000000000000000 9 1 1 MIS_YAW_TMT -1.000000000000000000 9 1 1 MODALAI_CONFIG 0 6 1 1 MOT_SLEW_MAX 0.000000000000000000 9 1 1 MPC_ACC_DOWN_MAX 3.000000000000000000 9 1 1 MPC_ACC_HOR 3.000000000000000000 9 1 1 MPC_ACC_HOR_MAX 1000.000000000000000000 9 1 1 MPC_ACC_UP_MAX 3.000000000000000000 9 1 1 MPC_ALT_MODE 0 6 1 1 MPC_HOLD_DZ 0.100000001490116119 9 1 1 MPC_HOLD_MAX_XY 0.000000000000000000 9 1 1 MPC_HOLD_MAX_Z 0.000000000000000000 9 1 1 MPC_JERK_AUTO 4.000000000000000000 9 1 1 MPC_JERK_MAX 40.000000000000000000 9 1 1 MPC_LAND_ALT1 10.000000000000000000 9 1 1 MPC_LAND_ALT2 5.000000000000000000 9 1 1 MPC_LAND_ALT3 1.000000000000000000 9 1 1 MPC_LAND_CRWL 0.300000011920928955 9 1 1 MPC_LAND_RADIUS 1000.000000000000000000 9 1 1 MPC_LAND_RC_HELP 0 6 1 1 MPC_LAND_SPEED 1.000000000000000000 9 1 1 MPC_MANTHR_MIN 0.079999998211860657 9 1 1 MPC_MAN_TILT_MAX 35.000000000000000000 9 1 1 MPC_MAN_Y_MAX 150.000000000000000000 9 1 1 MPC_MAN_Y_TAU 0.079999998211860657 9 1 1 MPC_POS_MODE 4 6 1 1 MPC_THR_CURVE 0 6 1 1 MPC_THR_HOVER 0.340000003576278687 9 1 1 MPC_THR_MAX 0.600000023841857910 9 1 1 MPC_THR_MIN 0.079999998211860657 9 1 1 MPC_THR_XY_MARG 0.300000011920928955 9 1 1 MPC_TILTMAX_AIR 30.000000000000000000 9 1 1 MPC_TILTMAX_LND 12.000000000000000000 9 1 1 MPC_TKO_RAMP_T 1.000000000000000000 9 1 1 MPC_TKO_SPEED 1.500000000000000000 9 1 1 MPC_USE_HTE 1 6 1 1 MPC_VELD_LP 5.000000000000000000 9 1 1 MPC_VEL_MANUAL 3.000000000000000000 9 1 1 MPC_VEL_MAN_BACK -1.000000000000000000 9 1 1 MPC_VEL_MAN_SIDE -1.000000000000000000 9 1 1 MPC_XY_CRUISE 3.000000000000000000 9 1 1 MPC_XY_ERR_MAX 2.000000000000000000 9 1 1 MPC_XY_MAN_EXPO 0.449999988079071045 9 1 1 MPC_XY_P 3.500000000000000000 9 1 1 MPC_XY_TRAJ_P 0.500000000000000000 9 1 1 MPC_XY_VEL_ALL -10.000000000000000000 9 1 1 MPC_XY_VEL_D_ACC 0.000000000000000000 9 1 1 MPC_XY_VEL_I_ACC 0.100000001490116119 9 1 1 MPC_XY_VEL_MAX 3.000000000000000000 9 1 1 MPC_XY_VEL_P_ACC 3.000000000000000000 9 1 1 MPC_YAWRAUTO_MAX 45.000000000000000000 9 1 1 MPC_YAW_EXPO 0.300000011920928955 9 1 1 MPC_YAW_MODE 0 6 1 1 MPC_Z_MAN_EXPO 0.100000001490116119 9 1 1 MPC_Z_P 5.000000000000000000 9 1 1 MPC_Z_VEL_ALL -3.000000000000000000 9 1 1 MPC_Z_VEL_D_ACC 0.000000000000000000 9 1 1 MPC_Z_VEL_I_ACC 2.000000000000000000 9 1 1 MPC_Z_VEL_MAX_DN 1.000000000000000000 9 1 1 MPC_Z_VEL_MAX_UP 1.000000000000000000 9 1 1 MPC_Z_VEL_P_ACC 8.000000000000000000 9 1 1 MPC_Z_V_AUTO_DN 1.000000000000000000 9 1 1 MPC_Z_V_AUTO_UP 1.000000000000000000 9 1 1 NAV_ACC_RAD 10.000000000000000000 9 1 1 NAV_DLL_ACT 0 6 1 1 NAV_FORCE_VT 1 6 1 1 NAV_FW_ALTL_RAD 5.000000000000000000 9 1 1 NAV_FW_ALT_RAD 10.000000000000000000 9 1 1 NAV_LOITER_RAD 80.000000000000000000 9 1 1 NAV_MC_ALT_RAD 0.800000011920928955 9 1 1 NAV_MIN_LTR_ALT -1.000000000000000000 9 1 1 NAV_RCL_ACT 2 6 1 1 NAV_TRAFF_AVOID 1 6 1 1 NAV_TRAFF_A_HOR 500.000000000000000000 9 1 1 NAV_TRAFF_A_VER 500.000000000000000000 9 1 1 NAV_TRAFF_COLL_T 60 6 1 1 PLD_BTOUT 5.000000000000000000 9 1 1 PLD_FAPPR_ALT 0.100000001490116119 9 1 1 PLD_HACC_RAD 0.200000002980232239 9 1 1 PLD_MAX_SRCH 3 6 1 1 PLD_SRCH_ALT 10.000000000000000000 9 1 1 PLD_SRCH_TOUT 10.000000000000000000 9 1 1 RC10_DZ 0.000000000000000000 9 1 1 RC10_MAX 2000.000000000000000000 9 1 1 RC10_MIN 1000.000000000000000000 9 1 1 RC10_REV 1.000000000000000000 9 1 1 RC10_TRIM 1500.000000000000000000 9 1 1 RC11_DZ 0.000000000000000000 9 1 1 RC11_MAX 2000.000000000000000000 9 1 1 RC11_MIN 1000.000000000000000000 9 1 1 RC11_REV 1.000000000000000000 9 1 1 RC11_TRIM 1500.000000000000000000 9 1 1 RC12_DZ 0.000000000000000000 9 1 1 RC12_MAX 2000.000000000000000000 9 1 1 RC12_MIN 1000.000000000000000000 9 1 1 RC12_REV 1.000000000000000000 9 1 1 RC12_TRIM 1500.000000000000000000 9 1 1 RC13_DZ 0.000000000000000000 9 1 1 RC13_MAX 2000.000000000000000000 9 1 1 RC13_MIN 1000.000000000000000000 9 1 1 RC13_REV 1.000000000000000000 9 1 1 RC13_TRIM 1500.000000000000000000 9 1 1 RC14_DZ 0.000000000000000000 9 1 1 RC14_MAX 2000.000000000000000000 9 1 1 RC14_MIN 1000.000000000000000000 9 1 1 RC14_REV 1.000000000000000000 9 1 1 RC14_TRIM 1500.000000000000000000 9 1 1 RC15_DZ 0.000000000000000000 9 1 1 RC15_MAX 2000.000000000000000000 9 1 1 RC15_MIN 1000.000000000000000000 9 1 1 RC15_REV 1.000000000000000000 9 1 1 RC15_TRIM 1500.000000000000000000 9 1 1 RC16_DZ 0.000000000000000000 9 1 1 RC16_MAX 2000.000000000000000000 9 1 1 RC16_MIN 1000.000000000000000000 9 1 1 RC16_REV 1.000000000000000000 9 1 1 RC16_TRIM 1500.000000000000000000 9 1 1 RC17_DZ 0.000000000000000000 9 1 1 RC17_MAX 2000.000000000000000000 9 1 1 RC17_MIN 1000.000000000000000000 9 1 1 RC17_REV 1.000000000000000000 9 1 1 RC17_TRIM 1500.000000000000000000 9 1 1 RC18_DZ 0.000000000000000000 9 1 1 RC18_MAX 2000.000000000000000000 9 1 1 RC18_MIN 1000.000000000000000000 9 1 1 RC18_REV 1.000000000000000000 9 1 1 RC18_TRIM 1500.000000000000000000 9 1 1 RC1_DZ 10.000000000000000000 9 1 1 RC1_MAX 2000.000000000000000000 9 1 1 RC1_MIN 1001.000000000000000000 9 1 1 RC1_REV 1.000000000000000000 9 1 1 RC1_TRIM 1499.000000000000000000 9 1 1 RC2_DZ 10.000000000000000000 9 1 1 RC2_MAX 2000.000000000000000000 9 1 1 RC2_MIN 1001.000000000000000000 9 1 1 RC2_REV 1.000000000000000000 9 1 1 RC2_TRIM 1501.000000000000000000 9 1 1 RC3_DZ 10.000000000000000000 9 1 1 RC3_MAX 2000.000000000000000000 9 1 1 RC3_MIN 1001.000000000000000000 9 1 1 RC3_REV 1.000000000000000000 9 1 1 RC3_TRIM 1001.000000000000000000 9 1 1 RC4_DZ 10.000000000000000000 9 1 1 RC4_MAX 2000.000000000000000000 9 1 1 RC4_MIN 1001.000000000000000000 9 1 1 RC4_REV 1.000000000000000000 9 1 1 RC4_TRIM 1507.000000000000000000 9 1 1 RC5_DZ 10.000000000000000000 9 1 1 RC5_MAX 1988.000000000000000000 9 1 1 RC5_MIN 1011.000000000000000000 9 1 1 RC5_REV 1.000000000000000000 9 1 1 RC5_TRIM 1499.000000000000000000 9 1 1 RC6_DZ 10.000000000000000000 9 1 1 RC6_MAX 1988.000000000000000000 9 1 1 RC6_MIN 1011.000000000000000000 9 1 1 RC6_REV 1.000000000000000000 9 1 1 RC6_TRIM 1499.000000000000000000 9 1 1 RC7_DZ 10.000000000000000000 9 1 1 RC7_MAX 1988.000000000000000000 9 1 1 RC7_MIN 1011.000000000000000000 9 1 1 RC7_REV 1.000000000000000000 9 1 1 RC7_TRIM 1499.000000000000000000 9 1 1 RC8_DZ 10.000000000000000000 9 1 1 RC8_MAX 1988.000000000000000000 9 1 1 RC8_MIN 1011.000000000000000000 9 1 1 RC8_REV 1.000000000000000000 9 1 1 RC8_TRIM 1499.000000000000000000 9 1 1 RC9_DZ 0.000000000000000000 9 1 1 RC9_MAX 2000.000000000000000000 9 1 1 RC9_MIN 1000.000000000000000000 9 1 1 RC9_REV 1.000000000000000000 9 1 1 RC9_TRIM 1500.000000000000000000 9 1 1 RC_ARMSWITCH_TH 0.750000000000000000 9 1 1 RC_CHAN_CNT 16 6 1 1 RC_CRSF_TEL_EN 0 6 1 1 RC_ENG_MOT_TH 0.750000000000000000 9 1 1 RC_FAILS_THR 0 6 1 1 RC_GEAR_TH 0.750000000000000000 9 1 1 RC_KILLSWITCH_TH 0.750000000000000000 9 1 1 RC_LOITER_TH 0.750000000000000000 9 1 1 RC_MAP_ACRO_SW 0 6 1 1 RC_MAP_ARM_SW 0 6 1 1 RC_MAP_AUX1 0 6 1 1 RC_MAP_AUX2 0 6 1 1 RC_MAP_AUX3 0 6 1 1 RC_MAP_AUX4 0 6 1 1 RC_MAP_AUX5 0 6 1 1 RC_MAP_AUX6 0 6 1 1 RC_MAP_ENG_MOT 0 6 1 1 RC_MAP_FAILSAFE 0 6 1 1 RC_MAP_FLAPS 0 6 1 1 RC_MAP_FLTMODE 6 6 1 1 RC_MAP_FLTM_BTN 0 6 1 1 RC_MAP_GEAR_SW 0 6 1 1 RC_MAP_KILL_SW 5 6 1 1 RC_MAP_LOITER_SW 0 6 1 1 RC_MAP_MAN_SW 0 6 1 1 RC_MAP_MODE_SW 0 6 1 1 RC_MAP_OFFB_SW 0 6 1 1 RC_MAP_PARAM1 0 6 1 1 RC_MAP_PARAM2 0 6 1 1 RC_MAP_PARAM3 0 6 1 1 RC_MAP_PITCH 2 6 1 1 RC_MAP_POSCTL_SW 0 6 1 1 RC_MAP_RATT_SW 0 6 1 1 RC_MAP_RETURN_SW 0 6 1 1 RC_MAP_ROLL 1 6 1 1 RC_MAP_STAB_SW 0 6 1 1 RC_MAP_THROTTLE 3 6 1 1 RC_MAP_TRANS_SW 0 6 1 1 RC_MAP_YAW 4 6 1 1 RC_OFFB_TH 0.750000000000000000 9 1 1 RC_RETURN_TH 0.750000000000000000 9 1 1 RC_TRANS_TH 0.750000000000000000 9 1 1 RTL_CONE_ANG 45 6 1 1 RTL_DESCEND_ALT 30.000000000000000000 9 1 1 RTL_HDG_MD 0 6 1 1 RTL_LAND_DELAY 0.000000000000000000 9 1 1 RTL_LOITER_RAD 80.000000000000000000 9 1 1 RTL_MIN_DIST 10.000000000000000000 9 1 1 RTL_PLD_MD 0 6 1 1 RTL_RETURN_ALT 60.000000000000000000 9 1 1 RTL_TIME_FACTOR 1.100000023841857910 9 1 1 RTL_TIME_MARGIN 100 6 1 1 RTL_TYPE 0 6 1 1 SDLOG_BOOT_BAT 0 6 1 1 SDLOG_DIRS_MAX 0 6 1 1 SDLOG_MISSION 0 6 1 1 SDLOG_MODE 0 6 1 1 SDLOG_PROFILE 129 6 1 1 SDLOG_UTC_OFFSET 0 6 1 1 SDLOG_UUID 1 6 1 1 SENS_BARO_QNH 1013.250000000000000000 9 1 1 SENS_BARO_RATE 20.000000000000000000 9 1 1 SENS_BOARD_ROT 0 6 1 1 SENS_BOARD_X_OFF -0.587000012397766113 9 1 1 SENS_BOARD_Y_OFF -0.263300001621246338 9 1 1 SENS_BOARD_Z_OFF 0.000000000000000000 9 1 1 SENS_DPRES_OFF 0.000000000000000000 9 1 1 SENS_GPS_MASK 7 6 1 1 SENS_GPS_PRIME 0 6 1 1 SENS_GPS_TAU 10.000000000000000000 9 1 1 SENS_IMU_AUTOCAL 0 6 1 1 SENS_IMU_MODE 1 6 1 1 SENS_MAG_AUTOCAL 0 6 1 1 SENS_MAG_AUTOROT 0 6 1 1 SENS_MAG_MODE 1 6 1 1 SENS_MAG_RATE 15.000000000000000000 9 1 1 SENS_MAG_SIDES 63 6 1 1 SYS_AUTOCONFIG 0 6 1 1 SYS_AUTOSTART 4001 6 1 1 SYS_CAL_TDEL 24 6 1 1 SYS_CAL_TMAX 10 6 1 1 SYS_CAL_TMIN 5 6 1 1 SYS_FAC_CAL_MODE 0 6 1 1 SYS_FAILURE_EN 0 6 1 1 SYS_HAS_BARO 1 6 1 1 SYS_HAS_GPS 1 6 1 1 SYS_HAS_MAG 1 6 1 1 SYS_HAS_NUM_DIST 0 6 1 1 SYS_HITL 0 6 1 1 SYS_MC_EST_GROUP 2 6 1 1 SYS_RGB_MAXBRT 1.000000000000000000 9 1 1 SYS_STCK_EN 1 6 1 1 SYS_VEHICLE_RESP -0.400000005960464478 9 1 1 THR_MDL_FAC 0.899999976158142090 9 1 1 TRIG_MODE 0 6 1 1 UAVCAN_ENABLE 0 6 1 1 VOXL_ESC_BAUD 2000000 6 1 1 VOXL_ESC_CONFIG 1 6 1 1 VOXL_ESC_FUNC1 102 6 1 1 VOXL_ESC_FUNC2 103 6 1 1 VOXL_ESC_FUNC3 101 6 1 1 VOXL_ESC_FUNC4 104 6 1 1 VOXL_ESC_MODE 0 6 1 1 VOXL_ESC_PUB_BST 1 6 1 1 VOXL_ESC_REV 0 6 1 1 VOXL_ESC_RPM_MAX 15000 6 1 1 VOXL_ESC_RPM_MIN 2000 6 1 1 VOXL_ESC_SDIR1 0 6 1 1 VOXL_ESC_SDIR2 0 6 1 1 VOXL_ESC_SDIR3 0 6 1 1 VOXL_ESC_SDIR4 0 6 1 1 VOXL_ESC_T_COSP 0.990000009536743164 9 1 1 VOXL_ESC_T_DEAD 20 6 1 1 VOXL_ESC_T_EXPO 35 6 1 1 VOXL_ESC_T_MINF 0.150000005960464478 9 1 1 VOXL_ESC_T_OVER 0 6 1 1 VOXL_ESC_T_PERC 90 6 1 1 VOXL_ESC_T_WARN 0 6 1 1 VOXL_ESC_VLOG 1 6 1 1 VTO_LOITER_ALT 80.000000000000000000 9 1 1 VT_B_DEC_MSS 2.000000000000000000 9 1 1 WV_EN 0 6 1 1 WV_GAIN 1.000000000000000000 9 1 1 WV_ROLL_MIN 1.000000000000000000 9 1 1 WV_YRATE_MAX 90.000000000000000000 9 1 1 XRCE_DDS_DOM_ID 0 6 1 1 XRCE_DDS_KEY 1 6 -
Timeline for open-vins documentation@Zachary-Lowell-0 it's a typical indoor environment (a room in a flat).
# Onboard parameters for Vehicle 1 # # Stack: PX4 Pro # Vehicle: Multi-Rotor # Version: 1.14.0 dev # Git Revision: 70d986f08a020054 # # Vehicle-Id Component-Id Name Value Type 1 1 ASPD_SCALE_1 1.000000000000000000 9 1 1 BAT1_CAPACITY 3950.000000000000000000 9 1 1 BAT1_N_CELLS 2 6 1 1 BAT1_R_INTERNAL 0.021999999880790710 9 1 1 BAT1_SOURCE 0 6 1 1 BAT1_V_CHARGED 4.099999904632568359 9 1 1 BAT1_V_EMPTY 2.799999952316284180 9 1 1 BAT1_V_LOAD_DROP 0.100000001490116119 9 1 1 BAT_AVRG_CURRENT 4.300000190734863281 9 1 1 BAT_CRIT_THR 0.100000001490116119 9 1 1 BAT_EMERGEN_THR 0.050000000745058060 9 1 1 BAT_LOW_THR 0.150000005960464478 9 1 1 BAT_N_CELLS 3 6 1 1 BAT_V_CHARGED 4.050000190734863281 9 1 1 BAT_V_EMPTY 3.599999904632568359 9 1 1 BAT_V_LOAD_DROP 0.300000011920928955 9 1 1 CAL_ACC0_ID 2490378 6 1 1 CAL_ACC0_PRIO 50 6 1 1 CAL_ACC0_ROT -1 6 1 1 CAL_ACC0_XOFF -0.004399999976158142 9 1 1 CAL_ACC0_XSCALE 1.000000000000000000 9 1 1 CAL_ACC0_YOFF 0.004999999888241291 9 1 1 CAL_ACC0_YSCALE 1.000000000000000000 9 1 1 CAL_ACC0_ZOFF -0.136299997568130493 9 1 1 CAL_ACC0_ZSCALE 1.000000000000000000 9 1 1 CAL_ACC1_ID 0 6 1 1 CAL_ACC2_ID 0 6 1 1 CAL_ACC3_ID 0 6 1 1 CAL_AIR_CMODEL 0 6 1 1 CAL_AIR_TUBED_MM 1.500000000000000000 9 1 1 CAL_AIR_TUBELEN 0.200000002980232239 9 1 1 CAL_BARO0_ID 0 6 1 1 CAL_BARO1_ID 0 6 1 1 CAL_BARO2_ID 0 6 1 1 CAL_BARO3_ID 0 6 1 1 CAL_GYRO0_ID 2490378 6 1 1 CAL_GYRO0_PRIO 50 6 1 1 CAL_GYRO0_ROT -1 6 1 1 CAL_GYRO0_XOFF 0.009499999694526196 9 1 1 CAL_GYRO0_YOFF 0.012900000438094139 9 1 1 CAL_GYRO0_ZOFF 0.003199999919161201 9 1 1 CAL_GYRO1_ID 0 6 1 1 CAL_GYRO2_ID 0 6 1 1 CAL_GYRO3_ID 0 6 1 1 CAL_MAG0_ID 527625 6 1 1 CAL_MAG0_PRIO 75 6 1 1 CAL_MAG0_ROT 0 6 1 1 CAL_MAG0_XCOMP 0.000000000000000000 9 1 1 CAL_MAG0_XODIAG -0.002300000051036477 9 1 1 CAL_MAG0_XOFF 0.019600000232458115 9 1 1 CAL_MAG0_XSCALE 0.371300011873245239 9 1 1 CAL_MAG0_YCOMP 0.000000000000000000 9 1 1 CAL_MAG0_YODIAG 0.009100000374019146 9 1 1 CAL_MAG0_YOFF 0.122199997305870056 9 1 1 CAL_MAG0_YSCALE 0.383500009775161743 9 1 1 CAL_MAG0_ZCOMP 0.000000000000000000 9 1 1 CAL_MAG0_ZODIAG 0.008999999612569809 9 1 1 CAL_MAG0_ZOFF -4.477099895477294922 9 1 1 CAL_MAG0_ZSCALE 0.055500000715255737 9 1 1 CAL_MAG1_ID 0 6 1 1 CAL_MAG1_ROT -1 6 1 1 CAL_MAG2_ID 0 6 1 1 CAL_MAG2_ROT -1 6 1 1 CAL_MAG3_ID 0 6 1 1 CAL_MAG3_ROT -1 6 1 1 CAL_MAG_COMP_TYP 0 6 1 1 CAL_MAG_SIDES 63 6 1 1 CA_AIRFRAME 0 6 1 1 CA_FAILURE_MODE 0 6 1 1 CA_METHOD 2 6 1 1 CA_R0_SLEW 0.000000000000000000 9 1 1 CA_R10_SLEW 0.000000000000000000 9 1 1 CA_R11_SLEW 0.000000000000000000 9 1 1 CA_R1_SLEW 0.000000000000000000 9 1 1 CA_R2_SLEW 0.000000000000000000 9 1 1 CA_R3_SLEW 0.000000000000000000 9 1 1 CA_R4_SLEW 0.000000000000000000 9 1 1 CA_R5_SLEW 0.000000000000000000 9 1 1 CA_R6_SLEW 0.000000000000000000 9 1 1 CA_R7_SLEW 0.000000000000000000 9 1 1 CA_R8_SLEW 0.000000000000000000 9 1 1 CA_R9_SLEW 0.000000000000000000 9 1 1 CA_ROTOR0_AX 0.000000000000000000 9 1 1 CA_ROTOR0_AY 0.000000000000000000 9 1 1 CA_ROTOR0_AZ -1.000000000000000000 9 1 1 CA_ROTOR0_CT 6.500000000000000000 9 1 1 CA_ROTOR0_KM 0.050000000745058060 9 1 1 CA_ROTOR0_PX 0.085000000894069672 9 1 1 CA_ROTOR0_PY 0.062500000000000000 9 1 1 CA_ROTOR0_PZ 0.000000000000000000 9 1 1 CA_ROTOR10_AX 0.000000000000000000 9 1 1 CA_ROTOR10_AY 0.000000000000000000 9 1 1 CA_ROTOR10_AZ -1.000000000000000000 9 1 1 CA_ROTOR10_CT 6.500000000000000000 9 1 1 CA_ROTOR10_KM 0.050000000745058060 9 1 1 CA_ROTOR10_PX 0.000000000000000000 9 1 1 CA_ROTOR10_PY 0.000000000000000000 9 1 1 CA_ROTOR10_PZ 0.000000000000000000 9 1 1 CA_ROTOR11_AX 0.000000000000000000 9 1 1 CA_ROTOR11_AY 0.000000000000000000 9 1 1 CA_ROTOR11_AZ -1.000000000000000000 9 1 1 CA_ROTOR11_CT 6.500000000000000000 9 1 1 CA_ROTOR11_KM 0.050000000745058060 9 1 1 CA_ROTOR11_PX 0.000000000000000000 9 1 1 CA_ROTOR11_PY 0.000000000000000000 9 1 1 CA_ROTOR11_PZ 0.000000000000000000 9 1 1 CA_ROTOR1_AX 0.000000000000000000 9 1 1 CA_ROTOR1_AY 0.000000000000000000 9 1 1 CA_ROTOR1_AZ -1.000000000000000000 9 1 1 CA_ROTOR1_CT 6.500000000000000000 9 1 1 CA_ROTOR1_KM 0.050000000745058060 9 1 1 CA_ROTOR1_PX -0.085000000894069672 9 1 1 CA_ROTOR1_PY -0.062500000000000000 9 1 1 CA_ROTOR1_PZ 0.000000000000000000 9 1 1 CA_ROTOR2_AX 0.000000000000000000 9 1 1 CA_ROTOR2_AY 0.000000000000000000 9 1 1 CA_ROTOR2_AZ -1.000000000000000000 9 1 1 CA_ROTOR2_CT 6.500000000000000000 9 1 1 CA_ROTOR2_KM -0.050000000745058060 9 1 1 CA_ROTOR2_PX 0.085000000894069672 9 1 1 CA_ROTOR2_PY -0.062500000000000000 9 1 1 CA_ROTOR2_PZ 0.000000000000000000 9 1 1 CA_ROTOR3_AX 0.000000000000000000 9 1 1 CA_ROTOR3_AY 0.000000000000000000 9 1 1 CA_ROTOR3_AZ -1.000000000000000000 9 1 1 CA_ROTOR3_CT 6.500000000000000000 9 1 1 CA_ROTOR3_KM -0.050000000745058060 9 1 1 CA_ROTOR3_PX -0.085000000894069672 9 1 1 CA_ROTOR3_PY 0.062500000000000000 9 1 1 CA_ROTOR3_PZ 0.000000000000000000 9 1 1 CA_ROTOR4_AX 0.000000000000000000 9 1 1 CA_ROTOR4_AY 0.000000000000000000 9 1 1 CA_ROTOR4_AZ -1.000000000000000000 9 1 1 CA_ROTOR4_CT 6.500000000000000000 9 1 1 CA_ROTOR4_KM 0.050000000745058060 9 1 1 CA_ROTOR4_PX 0.000000000000000000 9 1 1 CA_ROTOR4_PY 0.000000000000000000 9 1 1 CA_ROTOR4_PZ 0.000000000000000000 9 1 1 CA_ROTOR5_AX 0.000000000000000000 9 1 1 CA_ROTOR5_AY 0.000000000000000000 9 1 1 CA_ROTOR5_AZ -1.000000000000000000 9 1 1 CA_ROTOR5_CT 6.500000000000000000 9 1 1 CA_ROTOR5_KM 0.050000000745058060 9 1 1 CA_ROTOR5_PX 0.000000000000000000 9 1 1 CA_ROTOR5_PY 0.000000000000000000 9 1 1 CA_ROTOR5_PZ 0.000000000000000000 9 1 1 CA_ROTOR6_AX 0.000000000000000000 9 1 1 CA_ROTOR6_AY 0.000000000000000000 9 1 1 CA_ROTOR6_AZ -1.000000000000000000 9 1 1 CA_ROTOR6_CT 6.500000000000000000 9 1 1 CA_ROTOR6_KM 0.050000000745058060 9 1 1 CA_ROTOR6_PX 0.000000000000000000 9 1 1 CA_ROTOR6_PY 0.000000000000000000 9 1 1 CA_ROTOR6_PZ 0.000000000000000000 9 1 1 CA_ROTOR7_AX 0.000000000000000000 9 1 1 CA_ROTOR7_AY 0.000000000000000000 9 1 1 CA_ROTOR7_AZ -1.000000000000000000 9 1 1 CA_ROTOR7_CT 6.500000000000000000 9 1 1 CA_ROTOR7_KM 0.050000000745058060 9 1 1 CA_ROTOR7_PX 0.000000000000000000 9 1 1 CA_ROTOR7_PY 0.000000000000000000 9 1 1 CA_ROTOR7_PZ 0.000000000000000000 9 1 1 CA_ROTOR8_AX 0.000000000000000000 9 1 1 CA_ROTOR8_AY 0.000000000000000000 9 1 1 CA_ROTOR8_AZ -1.000000000000000000 9 1 1 CA_ROTOR8_CT 6.500000000000000000 9 1 1 CA_ROTOR8_KM 0.050000000745058060 9 1 1 CA_ROTOR8_PX 0.000000000000000000 9 1 1 CA_ROTOR8_PY 0.000000000000000000 9 1 1 CA_ROTOR8_PZ 0.000000000000000000 9 1 1 CA_ROTOR9_AX 0.000000000000000000 9 1 1 CA_ROTOR9_AY 0.000000000000000000 9 1 1 CA_ROTOR9_AZ -1.000000000000000000 9 1 1 CA_ROTOR9_CT 6.500000000000000000 9 1 1 CA_ROTOR9_KM 0.050000000745058060 9 1 1 CA_ROTOR9_PX 0.000000000000000000 9 1 1 CA_ROTOR9_PY 0.000000000000000000 9 1 1 CA_ROTOR9_PZ 0.000000000000000000 9 1 1 CA_ROTOR_COUNT 4 6 1 1 CA_R_REV 0 6 1 1 CA_SV0_SLEW 0.000000000000000000 9 1 1 CA_SV1_SLEW 0.000000000000000000 9 1 1 CA_SV2_SLEW 0.000000000000000000 9 1 1 CA_SV3_SLEW 0.000000000000000000 9 1 1 CA_SV4_SLEW 0.000000000000000000 9 1 1 CA_SV5_SLEW 0.000000000000000000 9 1 1 CA_SV6_SLEW 0.000000000000000000 9 1 1 CA_SV7_SLEW 0.000000000000000000 9 1 1 CBRK_AIRSPD_CHK 0 6 1 1 CBRK_FLIGHTTERM 121212 6 1 1 CBRK_IO_SAFETY 22027 6 1 1 CBRK_SUPPLY_CHK 894281 6 1 1 CBRK_USB_CHK 197848 6 1 1 CBRK_VTOLARMING 0 6 1 1 COM_ACT_FAIL_ACT 0 6 1 1 COM_ARM_ARSP_EN 1 6 1 1 COM_ARM_AUTH_ID 10 6 1 1 COM_ARM_AUTH_MET 0 6 1 1 COM_ARM_AUTH_REQ 0 6 1 1 COM_ARM_AUTH_TO 1.000000000000000000 9 1 1 COM_ARM_BAD_INOV 0 6 1 1 COM_ARM_CHK_ESCS 0 6 1 1 COM_ARM_EKF_BIAS 3.000000000000000000 9 1 1 COM_ARM_EKF_HGT 1.000000000000000000 9 1 1 COM_ARM_EKF_POS 0.500000000000000000 9 1 1 COM_ARM_EKF_VEL 0.500000000000000000 9 1 1 COM_ARM_EKF_YAW 0.500000000000000000 9 1 1 COM_ARM_HFLT_CHK 1 6 1 1 COM_ARM_IMU_ACC 0.699999988079071045 9 1 1 COM_ARM_IMU_GYR 0.250000000000000000 9 1 1 COM_ARM_MAG_ANG 60 6 1 1 COM_ARM_MAG_STR 2 6 1 1 COM_ARM_MIS_REQ 0 6 1 1 COM_ARM_ODID 0 6 1 1 COM_ARM_SDCARD 0 6 1 1 COM_ARM_SWISBTN 0 6 1 1 COM_ARM_WO_GPS 1 6 1 1 COM_CPU_MAX -1.000000000000000000 9 1 1 COM_DISARM_FORCE 0 6 1 1 COM_DISARM_LAND 0.100000001490116119 9 1 1 COM_DISARM_PRFLT 20.000000000000000000 9 1 1 COM_DL_LOSS_T 10 6 1 1 COM_FAIL_ACT_T 5.000000000000000000 9 1 1 COM_FLIGHT_UUID 0 6 1 1 COM_FLTMODE1 0 6 1 1 COM_FLTMODE2 0 6 1 1 COM_FLTMODE3 2 6 1 1 COM_FLTMODE4 2 6 1 1 COM_FLTMODE5 7 6 1 1 COM_FLTMODE6 7 6 1 1 COM_FLT_PROFILE 0 6 1 1 COM_FLT_TIME_MAX -1 6 1 1 COM_FORCE_SAFETY 0 6 1 1 COM_HLDL_LOSS_T 120 6 1 1 COM_HLDL_REG_T 0 6 1 1 COM_HOME_EN 1 6 1 1 COM_HOME_IN_AIR 0 6 1 1 COM_IMB_PROP_ACT 0 6 1 1 COM_KILL_DISARM 0.000000000000000000 9 1 1 COM_LKDOWN_TKO 3.000000000000000000 9 1 1 COM_LOW_BAT_ACT 0 6 1 1 COM_MOT_TEST_EN 1 6 1 1 COM_OBC_LOSS_T 5.000000000000000000 9 1 1 COM_OBL_RC_ACT 0 6 1 1 COM_OBS_AVOID 0 6 1 1 COM_OF_LOSS_T 1.000000000000000000 9 1 1 COM_PARACHUTE 0 6 1 1 COM_POSCTL_NAVL 0 6 1 1 COM_POS_FS_DELAY 1 6 1 1 COM_POS_FS_EPH 5.000000000000000000 9 1 1 COM_POS_LOW_EPH -1.000000000000000000 9 1 1 COM_POWER_COUNT 1 6 1 1 COM_PREARM_MODE 0 6 1 1 COM_QC_ACT 0 6 1 1 COM_RCL_EXCEPT 0 6 1 1 COM_RC_ARM_HYST 1000 6 1 1 COM_RC_IN_MODE 3 6 1 1 COM_RC_LOSS_T 0.500000000000000000 9 1 1 COM_RC_OVERRIDE 1 6 1 1 COM_RC_STICK_OV 30.000000000000000000 9 1 1 COM_SPOOLUP_TIME 2.000000000000000000 9 1 1 COM_TAKEOFF_ACT 0 6 1 1 COM_VEL_FS_EVH 1.000000000000000000 9 1 1 COM_WIND_MAX -1.000000000000000000 9 1 1 COM_WIND_WARN -1.000000000000000000 9 1 1 CP_DELAY 0.400000005960464478 9 1 1 CP_DIST -1.000000000000000000 9 1 1 CP_GO_NO_DATA 0 6 1 1 CP_GUIDE_ANG 30.000000000000000000 9 1 1 EKF2_ABIAS_INIT 0.200000002980232239 9 1 1 EKF2_ABL_ACCLIM 25.000000000000000000 9 1 1 EKF2_ABL_GYRLIM 3.000000000000000000 9 1 1 EKF2_ABL_LIM 0.400000005960464478 9 1 1 EKF2_ABL_TAU 0.500000000000000000 9 1 1 EKF2_ACC_B_NOISE 0.003000000026077032 9 1 1 EKF2_ACC_NOISE 0.349999994039535522 9 1 1 EKF2_AID_MASK 0 6 1 1 EKF2_ANGERR_INIT 0.100000001490116119 9 1 1 EKF2_ARSP_THR 0.000000000000000000 9 1 1 EKF2_ASPD_MAX 20.000000000000000000 9 1 1 EKF2_ASP_DELAY 100.000000000000000000 9 1 1 EKF2_AVEL_DELAY 5.000000000000000000 9 1 1 EKF2_BARO_CTRL 1 6 1 1 EKF2_BARO_DELAY 0.000000000000000000 9 1 1 EKF2_BARO_GATE 5.000000000000000000 9 1 1 EKF2_BARO_NOISE 3.500000000000000000 9 1 1 EKF2_BCOEF_X 100.000000000000000000 9 1 1 EKF2_BCOEF_Y 100.000000000000000000 9 1 1 EKF2_BETA_GATE 5.000000000000000000 9 1 1 EKF2_BETA_NOISE 0.300000011920928955 9 1 1 EKF2_DECL_TYPE 7 6 1 1 EKF2_DRAG_CTRL 0 6 1 1 EKF2_DRAG_NOISE 2.500000000000000000 9 1 1 EKF2_EAS_NOISE 1.399999976158142090 9 1 1 EKF2_EVA_NOISE 0.100000001490116119 9 1 1 EKF2_EVP_GATE 5.000000000000000000 9 1 1 EKF2_EVP_NOISE 0.100000001490116119 9 1 1 EKF2_EVV_GATE 3.000000000000000000 9 1 1 EKF2_EVV_NOISE 0.100000001490116119 9 1 1 EKF2_EV_CTRL 15 6 1 1 EKF2_EV_DELAY 0.000000000000000000 9 1 1 EKF2_EV_HGT_TO 5000 6 1 1 EKF2_EV_NOISE_MD 0 6 1 1 EKF2_EV_POS_TO 1000 6 1 1 EKF2_EV_POS_X 0.000000000000000000 9 1 1 EKF2_EV_POS_Y 0.000000000000000000 9 1 1 EKF2_EV_POS_Z 0.000000000000000000 9 1 1 EKF2_EV_QMIN 1 6 1 1 EKF2_FUSE_BETA 0 6 1 1 EKF2_GBIAS_INIT 0.100000001490116119 9 1 1 EKF2_GND_EFF_DZ 4.000000000000000000 9 1 1 EKF2_GND_MAX_HGT 0.500000000000000000 9 1 1 EKF2_GPS_CHECK 245 6 1 1 EKF2_GPS_CTRL 0 6 1 1 EKF2_GPS_DELAY 110.000000000000000000 9 1 1 EKF2_GPS_POS_X 0.000000000000000000 9 1 1 EKF2_GPS_POS_Y 0.000000000000000000 9 1 1 EKF2_GPS_POS_Z 0.000000000000000000 9 1 1 EKF2_GPS_P_GATE 5.000000000000000000 9 1 1 EKF2_GPS_P_NOISE 0.500000000000000000 9 1 1 EKF2_GPS_V_GATE 5.000000000000000000 9 1 1 EKF2_GPS_V_NOISE 0.300000011920928955 9 1 1 EKF2_GRAV_NOISE 1.000000000000000000 9 1 1 EKF2_GSF_TAS 15.000000000000000000 9 1 1 EKF2_GYR_B_LIM 0.150000005960464478 9 1 1 EKF2_GYR_B_NOISE 0.001000000047497451 9 1 1 EKF2_GYR_NOISE 0.014999999664723873 9 1 1 EKF2_HDG_GATE 2.599999904632568359 9 1 1 EKF2_HEAD_NOISE 0.300000011920928955 9 1 1 EKF2_HGT_REF 3 6 1 1 EKF2_IMU_CTRL 3 6 1 1 EKF2_IMU_POS_X 0.004300000146031380 9 1 1 EKF2_IMU_POS_Y 0.007300000172108412 9 1 1 EKF2_IMU_POS_Z -0.016000000759959221 9 1 1 EKF2_MAG_ACCLIM 0.500000000000000000 9 1 1 EKF2_MAG_B_NOISE 0.000099999997473788 9 1 1 EKF2_MAG_CHECK 1 6 1 1 EKF2_MAG_DECL 0.000000000000000000 9 1 1 EKF2_MAG_DELAY 0.000000000000000000 9 1 1 EKF2_MAG_E_NOISE 0.001000000047497451 9 1 1 EKF2_MAG_GATE 3.000000000000000000 9 1 1 EKF2_MAG_NOISE 0.050000000745058060 9 1 1 EKF2_MAG_TYPE 5 6 1 1 EKF2_MAG_YAWLIM 0.200000002980232239 9 1 1 EKF2_MCOEF 0.150000005960464478 9 1 1 EKF2_MIN_RNG 0.100000001490116119 9 1 1 EKF2_NOAID_NOISE 10.000000000000000000 9 1 1 EKF2_NOAID_TOUT 5000000 6 1 1 EKF2_OF_CTRL 0 6 1 1 EKF2_OF_DELAY 20.000000000000000000 9 1 1 EKF2_OF_GATE 3.000000000000000000 9 1 1 EKF2_OF_N_MAX 0.500000000000000000 9 1 1 EKF2_OF_N_MIN 0.150000005960464478 9 1 1 EKF2_OF_POS_X 0.000000000000000000 9 1 1 EKF2_OF_POS_Y 0.000000000000000000 9 1 1 EKF2_OF_POS_Z 0.000000000000000000 9 1 1 EKF2_OF_QMIN 1 6 1 1 EKF2_PCOEF_XN 0.000000000000000000 9 1 1 EKF2_PCOEF_XP 0.000000000000000000 9 1 1 EKF2_PCOEF_YN 0.000000000000000000 9 1 1 EKF2_PCOEF_YP 0.000000000000000000 9 1 1 EKF2_PCOEF_Z 0.000000000000000000 9 1 1 EKF2_PREDICT_US 10000 6 1 1 EKF2_REQ_EPH 3.000000000000000000 9 1 1 EKF2_REQ_EPV 5.000000000000000000 9 1 1 EKF2_REQ_GPS_H 5.000000000000000000 9 1 1 EKF2_REQ_HDRIFT 0.100000001490116119 9 1 1 EKF2_REQ_NSATS 6 6 1 1 EKF2_REQ_PDOP 2.500000000000000000 9 1 1 EKF2_REQ_SACC 1.500000000000000000 9 1 1 EKF2_REQ_VDRIFT 0.200000002980232239 9 1 1 EKF2_RNG_A_HMAX 5.000000000000000000 9 1 1 EKF2_RNG_A_IGATE 1.000000000000000000 9 1 1 EKF2_RNG_A_VMAX 1.000000000000000000 9 1 1 EKF2_RNG_CTRL 0 6 1 1 EKF2_RNG_DELAY 5.000000000000000000 9 1 1 EKF2_RNG_GATE 5.000000000000000000 9 1 1 EKF2_RNG_K_GATE 1.000000000000000000 9 1 1 EKF2_RNG_NOISE 0.100000001490116119 9 1 1 EKF2_RNG_PITCH 0.000000000000000000 9 1 1 EKF2_RNG_POS_X 0.000000000000000000 9 1 1 EKF2_RNG_POS_Y 0.000000000000000000 9 1 1 EKF2_RNG_POS_Z 0.000000000000000000 9 1 1 EKF2_RNG_QLTY_T 1.000000000000000000 9 1 1 EKF2_RNG_SFE 0.050000000745058060 9 1 1 EKF2_SYNT_MAG_Z 0 6 1 1 EKF2_TAS_GATE 3.000000000000000000 9 1 1 EKF2_TAU_POS 0.250000000000000000 9 1 1 EKF2_TAU_VEL 0.250000000000000000 9 1 1 EKF2_TERR_GRAD 0.500000000000000000 9 1 1 EKF2_TERR_MASK 3 6 1 1 EKF2_TERR_NOISE 5.000000000000000000 9 1 1 EKF2_WIND_NSD 0.009999999776482582 9 1 1 FD_ACT_EN 1 6 1 1 FD_ACT_MOT_C2T 2.000000000000000000 9 1 1 FD_ACT_MOT_THR 0.200000002980232239 9 1 1 FD_ACT_MOT_TOUT 100 6 1 1 FD_ESCS_EN 1 6 1 1 FD_EXT_ATS_EN 0 6 1 1 FD_EXT_ATS_TRIG 1900 6 1 1 FD_FAIL_P 60 6 1 1 FD_FAIL_P_TTRI 0.300000011920928955 9 1 1 FD_FAIL_R 60 6 1 1 FD_FAIL_R_TTRI 0.300000011920928955 9 1 1 FD_IMB_PROP_THR 30 6 1 1 FLW_TGT_ALT_M 0 6 1 1 FLW_TGT_DST 8.000000000000000000 9 1 1 FLW_TGT_FA 180.000000000000000000 9 1 1 FLW_TGT_HT 8.000000000000000000 9 1 1 FLW_TGT_MAX_VEL 5.000000000000000000 9 1 1 FLW_TGT_RS 0.100000001490116119 9 1 1 FW_AIRSPD_MAX 20.000000000000000000 9 1 1 FW_AIRSPD_TRIM 15.000000000000000000 9 1 1 FW_ARSP_MODE 0 6 1 1 FW_PSP_OFF 0.000000000000000000 9 1 1 FW_T_CLMB_R_SP 3.000000000000000000 9 1 1 FW_T_SINK_R_SP 2.000000000000000000 9 1 1 GF_ACTION 2 6 1 1 GF_ALTMODE 0 6 1 1 GF_COUNT -1 6 1 1 GF_MAX_HOR_DIST 0.000000000000000000 9 1 1 GF_MAX_VER_DIST 0.000000000000000000 9 1 1 GF_PREDICT 0 6 1 1 GF_SOURCE 0 6 1 1 GND_SPEED_THR_SC 1.000000000000000000 9 1 1 GPIO_CTL_CH 0 6 1 1 GPS_1_GNSS 0 6 1 1 GPS_1_PROTOCOL 1 6 1 1 GPS_DUMP_COMM 0 6 1 1 GPS_PITCH_OFFSET 0.000000000000000000 9 1 1 GPS_SAT_INFO 0 6 1 1 GPS_UBX_BAUD2 230400 6 1 1 GPS_UBX_CFG_INTF 0 6 1 1 GPS_UBX_DYNMODEL 7 6 1 1 GPS_UBX_MODE 0 6 1 1 GPS_YAW_OFFSET 0.000000000000000000 9 1 1 HTE_ACC_GATE 3.000000000000000000 9 1 1 HTE_HT_ERR_INIT 0.100000001490116119 9 1 1 HTE_HT_NOISE 0.003599999938160181 9 1 1 HTE_THR_RANGE 0.200000002980232239 9 1 1 HTE_VXY_THR 10.000000000000000000 9 1 1 HTE_VZ_THR 2.000000000000000000 9 1 1 IMU_ACCEL_CUTOFF 80.000000000000000000 9 1 1 IMU_DGYRO_CUTOFF 60.000000000000000000 9 1 1 IMU_GYRO_CUTOFF 80.000000000000000000 9 1 1 IMU_GYRO_DNF_BW 15.000000000000000000 9 1 1 IMU_GYRO_DNF_EN 1 6 1 1 IMU_GYRO_DNF_HMC 3 6 1 1 IMU_GYRO_DNF_MIN 25.000000000000000000 9 1 1 IMU_GYRO_NF0_BW 20.000000000000000000 9 1 1 IMU_GYRO_NF0_FRQ 0.000000000000000000 9 1 1 IMU_GYRO_NF1_BW 20.000000000000000000 9 1 1 IMU_GYRO_NF1_FRQ 0.000000000000000000 9 1 1 IMU_GYRO_RATEMAX 800 6 1 1 IMU_INTEG_RATE 200 6 1 1 LNDMC_ALT_GND 2.000000000000000000 9 1 1 LNDMC_ALT_MAX -1.000000000000000000 9 1 1 LNDMC_ROT_MAX 30.000000000000000000 9 1 1 LNDMC_TRIG_TIME 0.500000000000000000 9 1 1 LNDMC_XY_VEL_MAX 1.500000000000000000 9 1 1 LNDMC_Z_VEL_MAX 0.250000000000000000 9 1 1 LND_FLIGHT_T_HI 0 6 1 1 LND_FLIGHT_T_LO 0 6 1 1 MAN_ARM_GESTURE 1 6 1 1 MAV_COMP_ID 1 6 1 1 MAV_FWDEXTSP 1 6 1 1 MAV_HASH_CHK_EN 1 6 1 1 MAV_HB_FORW_EN 1 6 1 1 MAV_PROTO_VER 0 6 1 1 MAV_RADIO_TOUT 5 6 1 1 MAV_SIK_RADIO_ID 0 6 1 1 MAV_SYS_ID 1 6 1 1 MAV_TYPE 2 6 1 1 MAV_USEHILGPS 0 6 1 1 MC_ACRO_EXPO 0.689999997615814209 9 1 1 MC_ACRO_EXPO_Y 0.689999997615814209 9 1 1 MC_ACRO_P_MAX 720.000000000000000000 9 1 1 MC_ACRO_R_MAX 720.000000000000000000 9 1 1 MC_ACRO_SUPEXPO 0.699999988079071045 9 1 1 MC_ACRO_SUPEXPOY 0.699999988079071045 9 1 1 MC_ACRO_Y_MAX 540.000000000000000000 9 1 1 MC_AIRMODE 0 6 1 1 MC_AT_APPLY 1 6 1 1 MC_AT_AXES 3 6 1 1 MC_AT_RISE_TIME 0.140000000596046448 9 1 1 MC_AT_START 0 6 1 1 MC_AT_SYSID_AMP 0.699999988079071045 9 1 1 MC_BAT_SCALE_EN 0 6 1 1 MC_INJECT_AMP 0.050000000745058060 9 1 1 MC_INJECT_CNT 12 6 1 1 MC_INJECT_EN 0 6 1 1 MC_INJECT_INC 1.000000000000000000 9 1 1 MC_INJECT_REST_T 1.000000000000000000 9 1 1 MC_INJECT_RPY 2 6 1 1 MC_INJECT_SINE_T 5.000000000000000000 9 1 1 MC_INJECT_START 3.000000000000000000 9 1 1 MC_MAN_TILT_TAU 0.000000000000000000 9 1 1 MC_ORBIT_RAD_MAX 1000.000000000000000000 9 1 1 MC_PITCHRATE_D 0.001099999994039536 9 1 1 MC_PITCHRATE_FF 0.000000000000000000 9 1 1 MC_PITCHRATE_I 0.228000000119209290 9 1 1 MC_PITCHRATE_K 1.000000000000000000 9 1 1 MC_PITCHRATE_MAX 130.000000000000000000 9 1 1 MC_PITCHRATE_P 0.097000002861022949 9 1 1 MC_PITCH_CUTOFF 30.000000000000000000 9 1 1 MC_PITCH_P 16.000000000000000000 9 1 1 MC_PR_INT_LIM 0.300000011920928955 9 1 1 MC_ROLLRATE_D 0.000899999984540045 9 1 1 MC_ROLLRATE_FF 0.000000000000000000 9 1 1 MC_ROLLRATE_I 0.171000003814697266 9 1 1 MC_ROLLRATE_K 1.000000000000000000 9 1 1 MC_ROLLRATE_MAX 130.000000000000000000 9 1 1 MC_ROLLRATE_P 0.071999996900558472 9 1 1 MC_ROLL_CUTOFF 30.000000000000000000 9 1 1 MC_ROLL_P 16.000000000000000000 9 1 1 MC_RR_INT_LIM 0.300000011920928955 9 1 1 MC_THR_CURVE_ACR 0 6 1 1 MC_YAWRATE_D 0.000000000000000000 9 1 1 MC_YAWRATE_FF 0.000000000000000000 9 1 1 MC_YAWRATE_I 0.500000000000000000 9 1 1 MC_YAWRATE_K 1.000000000000000000 9 1 1 MC_YAWRATE_MAX 150.000000000000000000 9 1 1 MC_YAWRATE_P 0.150000005960464478 9 1 1 MC_YAW_CUTOFF 10.000000000000000000 9 1 1 MC_YAW_P 2.799999952316284180 9 1 1 MC_YAW_WEIGHT 0.400000005960464478 9 1 1 MC_YR_INT_LIM 0.300000011920928955 9 1 1 MIS_DIST_1WP 900.000000000000000000 9 1 1 MIS_LND_ABRT_ALT 30 6 1 1 MIS_MNT_YAW_CTL 0 6 1 1 MIS_PD_TO 5.000000000000000000 9 1 1 MIS_TAKEOFF_ALT 2.500000000000000000 9 1 1 MIS_TKO_LAND_REQ 0 6 1 1 MIS_YAW_ERR 12.000000000000000000 9 1 1 MIS_YAW_TMT -1.000000000000000000 9 1 1 MODALAI_CONFIG 0 6 1 1 MOT_SLEW_MAX 0.000000000000000000 9 1 1 MPC_ACC_DOWN_MAX 3.000000000000000000 9 1 1 MPC_ACC_HOR 3.000000000000000000 9 1 1 MPC_ACC_HOR_MAX 1000.000000000000000000 9 1 1 MPC_ACC_UP_MAX 3.000000000000000000 9 1 1 MPC_ALT_MODE 0 6 1 1 MPC_HOLD_DZ 0.100000001490116119 9 1 1 MPC_HOLD_MAX_XY 0.000000000000000000 9 1 1 MPC_HOLD_MAX_Z 0.000000000000000000 9 1 1 MPC_JERK_AUTO 4.000000000000000000 9 1 1 MPC_JERK_MAX 40.000000000000000000 9 1 1 MPC_LAND_ALT1 10.000000000000000000 9 1 1 MPC_LAND_ALT2 5.000000000000000000 9 1 1 MPC_LAND_ALT3 1.000000000000000000 9 1 1 MPC_LAND_CRWL 0.300000011920928955 9 1 1 MPC_LAND_RADIUS 1000.000000000000000000 9 1 1 MPC_LAND_RC_HELP 0 6 1 1 MPC_LAND_SPEED 1.000000000000000000 9 1 1 MPC_MANTHR_MIN 0.079999998211860657 9 1 1 MPC_MAN_TILT_MAX 35.000000000000000000 9 1 1 MPC_MAN_Y_MAX 150.000000000000000000 9 1 1 MPC_MAN_Y_TAU 0.079999998211860657 9 1 1 MPC_POS_MODE 4 6 1 1 MPC_THR_CURVE 0 6 1 1 MPC_THR_HOVER 0.340000003576278687 9 1 1 MPC_THR_MAX 0.600000023841857910 9 1 1 MPC_THR_MIN 0.079999998211860657 9 1 1 MPC_THR_XY_MARG 0.300000011920928955 9 1 1 MPC_TILTMAX_AIR 30.000000000000000000 9 1 1 MPC_TILTMAX_LND 12.000000000000000000 9 1 1 MPC_TKO_RAMP_T 1.000000000000000000 9 1 1 MPC_TKO_SPEED 1.500000000000000000 9 1 1 MPC_USE_HTE 1 6 1 1 MPC_VELD_LP 5.000000000000000000 9 1 1 MPC_VEL_MANUAL 3.000000000000000000 9 1 1 MPC_VEL_MAN_BACK -1.000000000000000000 9 1 1 MPC_VEL_MAN_SIDE -1.000000000000000000 9 1 1 MPC_XY_CRUISE 3.000000000000000000 9 1 1 MPC_XY_ERR_MAX 2.000000000000000000 9 1 1 MPC_XY_MAN_EXPO 0.449999988079071045 9 1 1 MPC_XY_P 3.500000000000000000 9 1 1 MPC_XY_TRAJ_P 0.500000000000000000 9 1 1 MPC_XY_VEL_ALL -10.000000000000000000 9 1 1 MPC_XY_VEL_D_ACC 0.000000000000000000 9 1 1 MPC_XY_VEL_I_ACC 0.100000001490116119 9 1 1 MPC_XY_VEL_MAX 3.000000000000000000 9 1 1 MPC_XY_VEL_P_ACC 3.000000000000000000 9 1 1 MPC_YAWRAUTO_MAX 45.000000000000000000 9 1 1 MPC_YAW_EXPO 0.300000011920928955 9 1 1 MPC_YAW_MODE 0 6 1 1 MPC_Z_MAN_EXPO 0.100000001490116119 9 1 1 MPC_Z_P 5.000000000000000000 9 1 1 MPC_Z_VEL_ALL -3.000000000000000000 9 1 1 MPC_Z_VEL_D_ACC 0.000000000000000000 9 1 1 MPC_Z_VEL_I_ACC 2.000000000000000000 9 1 1 MPC_Z_VEL_MAX_DN 1.000000000000000000 9 1 1 MPC_Z_VEL_MAX_UP 1.000000000000000000 9 1 1 MPC_Z_VEL_P_ACC 8.000000000000000000 9 1 1 MPC_Z_V_AUTO_DN 1.000000000000000000 9 1 1 MPC_Z_V_AUTO_UP 1.000000000000000000 9 1 1 NAV_ACC_RAD 10.000000000000000000 9 1 1 NAV_DLL_ACT 0 6 1 1 NAV_FORCE_VT 1 6 1 1 NAV_FW_ALTL_RAD 5.000000000000000000 9 1 1 NAV_FW_ALT_RAD 10.000000000000000000 9 1 1 NAV_LOITER_RAD 80.000000000000000000 9 1 1 NAV_MC_ALT_RAD 0.800000011920928955 9 1 1 NAV_MIN_LTR_ALT -1.000000000000000000 9 1 1 NAV_RCL_ACT 2 6 1 1 NAV_TRAFF_AVOID 1 6 1 1 NAV_TRAFF_A_HOR 500.000000000000000000 9 1 1 NAV_TRAFF_A_VER 500.000000000000000000 9 1 1 NAV_TRAFF_COLL_T 60 6 1 1 PLD_BTOUT 5.000000000000000000 9 1 1 PLD_FAPPR_ALT 0.100000001490116119 9 1 1 PLD_HACC_RAD 0.200000002980232239 9 1 1 PLD_MAX_SRCH 3 6 1 1 PLD_SRCH_ALT 10.000000000000000000 9 1 1 PLD_SRCH_TOUT 10.000000000000000000 9 1 1 RC10_DZ 0.000000000000000000 9 1 1 RC10_MAX 2000.000000000000000000 9 1 1 RC10_MIN 1000.000000000000000000 9 1 1 RC10_REV 1.000000000000000000 9 1 1 RC10_TRIM 1500.000000000000000000 9 1 1 RC11_DZ 0.000000000000000000 9 1 1 RC11_MAX 2000.000000000000000000 9 1 1 RC11_MIN 1000.000000000000000000 9 1 1 RC11_REV 1.000000000000000000 9 1 1 RC11_TRIM 1500.000000000000000000 9 1 1 RC12_DZ 0.000000000000000000 9 1 1 RC12_MAX 1988.000000000000000000 9 1 1 RC12_MIN 1011.000000000000000000 9 1 1 RC12_REV 1.000000000000000000 9 1 1 RC12_TRIM 1499.000000000000000000 9 1 1 RC13_DZ 0.000000000000000000 9 1 1 RC13_MAX 2000.000000000000000000 9 1 1 RC13_MIN 1000.000000000000000000 9 1 1 RC13_REV 1.000000000000000000 9 1 1 RC13_TRIM 1500.000000000000000000 9 1 1 RC14_DZ 0.000000000000000000 9 1 1 RC14_MAX 2000.000000000000000000 9 1 1 RC14_MIN 1000.000000000000000000 9 1 1 RC14_REV 1.000000000000000000 9 1 1 RC14_TRIM 1500.000000000000000000 9 1 1 RC15_DZ 0.000000000000000000 9 1 1 RC15_MAX 2000.000000000000000000 9 1 1 RC15_MIN 1000.000000000000000000 9 1 1 RC15_REV 1.000000000000000000 9 1 1 RC15_TRIM 1500.000000000000000000 9 1 1 RC16_DZ 0.000000000000000000 9 1 1 RC16_MAX 2000.000000000000000000 9 1 1 RC16_MIN 1000.000000000000000000 9 1 1 RC16_REV 1.000000000000000000 9 1 1 RC16_TRIM 1500.000000000000000000 9 1 1 RC17_DZ 0.000000000000000000 9 1 1 RC17_MAX 2000.000000000000000000 9 1 1 RC17_MIN 1000.000000000000000000 9 1 1 RC17_REV 1.000000000000000000 9 1 1 RC17_TRIM 1500.000000000000000000 9 1 1 RC18_DZ 0.000000000000000000 9 1 1 RC18_MAX 2000.000000000000000000 9 1 1 RC18_MIN 1000.000000000000000000 9 1 1 RC18_REV 1.000000000000000000 9 1 1 RC18_TRIM 1500.000000000000000000 9 1 1 RC1_DZ 10.000000000000000000 9 1 1 RC1_MAX 2000.000000000000000000 9 1 1 RC1_MIN 1000.000000000000000000 9 1 1 RC1_REV 1.000000000000000000 9 1 1 RC1_TRIM 1500.000000000000000000 9 1 1 RC2_DZ 10.000000000000000000 9 1 1 RC2_MAX 2000.000000000000000000 9 1 1 RC2_MIN 1000.000000000000000000 9 1 1 RC2_REV 1.000000000000000000 9 1 1 RC2_TRIM 1500.000000000000000000 9 1 1 RC3_DZ 10.000000000000000000 9 1 1 RC3_MAX 2000.000000000000000000 9 1 1 RC3_MIN 1000.000000000000000000 9 1 1 RC3_REV 1.000000000000000000 9 1 1 RC3_TRIM 1500.000000000000000000 9 1 1 RC4_DZ 10.000000000000000000 9 1 1 RC4_MAX 2000.000000000000000000 9 1 1 RC4_MIN 1000.000000000000000000 9 1 1 RC4_REV 1.000000000000000000 9 1 1 RC4_TRIM 1500.000000000000000000 9 1 1 RC5_DZ 10.000000000000000000 9 1 1 RC5_MAX 1988.000000000000000000 9 1 1 RC5_MIN 1011.000000000000000000 9 1 1 RC5_REV 1.000000000000000000 9 1 1 RC5_TRIM 1500.000000000000000000 9 1 1 RC6_DZ 10.000000000000000000 9 1 1 RC6_MAX 1988.000000000000000000 9 1 1 RC6_MIN 1011.000000000000000000 9 1 1 RC6_REV 1.000000000000000000 9 1 1 RC6_TRIM 1500.000000000000000000 9 1 1 RC7_DZ 10.000000000000000000 9 1 1 RC7_MAX 1988.000000000000000000 9 1 1 RC7_MIN 1011.000000000000000000 9 1 1 RC7_REV 1.000000000000000000 9 1 1 RC7_TRIM 1500.000000000000000000 9 1 1 RC8_DZ 10.000000000000000000 9 1 1 RC8_MAX 1988.000000000000000000 9 1 1 RC8_MIN 1011.000000000000000000 9 1 1 RC8_REV 1.000000000000000000 9 1 1 RC8_TRIM 1500.000000000000000000 9 1 1 RC9_DZ 0.000000000000000000 9 1 1 RC9_MAX 2000.000000000000000000 9 1 1 RC9_MIN 1000.000000000000000000 9 1 1 RC9_REV 1.000000000000000000 9 1 1 RC9_TRIM 1500.000000000000000000 9 1 1 RC_ARMSWITCH_TH 0.750000000000000000 9 1 1 RC_CHAN_CNT 16 6 1 1 RC_CRSF_TEL_EN 0 6 1 1 RC_ENG_MOT_TH 0.750000000000000000 9 1 1 RC_FAILS_THR 0 6 1 1 RC_GEAR_TH 0.750000000000000000 9 1 1 RC_KILLSWITCH_TH 0.750000000000000000 9 1 1 RC_LOITER_TH 0.750000000000000000 9 1 1 RC_MAP_ACRO_SW 0 6 1 1 RC_MAP_ARM_SW 0 6 1 1 RC_MAP_AUX1 0 6 1 1 RC_MAP_AUX2 0 6 1 1 RC_MAP_AUX3 0 6 1 1 RC_MAP_AUX4 0 6 1 1 RC_MAP_AUX5 0 6 1 1 RC_MAP_AUX6 0 6 1 1 RC_MAP_ENG_MOT 0 6 1 1 RC_MAP_FAILSAFE 0 6 1 1 RC_MAP_FLAPS 0 6 1 1 RC_MAP_FLTMODE 6 6 1 1 RC_MAP_FLTM_BTN 0 6 1 1 RC_MAP_GEAR_SW 0 6 1 1 RC_MAP_KILL_SW 5 6 1 1 RC_MAP_LOITER_SW 0 6 1 1 RC_MAP_MAN_SW 0 6 1 1 RC_MAP_MODE_SW 0 6 1 1 RC_MAP_OFFB_SW 0 6 1 1 RC_MAP_PARAM1 0 6 1 1 RC_MAP_PARAM2 0 6 1 1 RC_MAP_PARAM3 0 6 1 1 RC_MAP_PITCH 2 6 1 1 RC_MAP_POSCTL_SW 0 6 1 1 RC_MAP_RATT_SW 0 6 1 1 RC_MAP_RETURN_SW 0 6 1 1 RC_MAP_ROLL 1 6 1 1 RC_MAP_STAB_SW 0 6 1 1 RC_MAP_THROTTLE 3 6 1 1 RC_MAP_TRANS_SW 0 6 1 1 RC_MAP_YAW 4 6 1 1 RC_OFFB_TH 0.750000000000000000 9 1 1 RC_RETURN_TH 0.750000000000000000 9 1 1 RC_TRANS_TH 0.750000000000000000 9 1 1 RTL_CONE_ANG 45 6 1 1 RTL_DESCEND_ALT 30.000000000000000000 9 1 1 RTL_HDG_MD 0 6 1 1 RTL_LAND_DELAY 0.000000000000000000 9 1 1 RTL_LOITER_RAD 80.000000000000000000 9 1 1 RTL_MIN_DIST 10.000000000000000000 9 1 1 RTL_PLD_MD 0 6 1 1 RTL_RETURN_ALT 60.000000000000000000 9 1 1 RTL_TIME_FACTOR 1.100000023841857910 9 1 1 RTL_TIME_MARGIN 100 6 1 1 RTL_TYPE 0 6 1 1 SDLOG_BOOT_BAT 0 6 1 1 SDLOG_DIRS_MAX 0 6 1 1 SDLOG_MISSION 0 6 1 1 SDLOG_MODE 0 6 1 1 SDLOG_PROFILE 129 6 1 1 SDLOG_UTC_OFFSET 0 6 1 1 SDLOG_UUID 1 6 1 1 SENS_BARO_QNH 1013.250000000000000000 9 1 1 SENS_BARO_RATE 20.000000000000000000 9 1 1 SENS_BOARD_ROT 0 6 1 1 SENS_BOARD_X_OFF -0.067400000989437103 9 1 1 SENS_BOARD_Y_OFF -0.318699985742568970 9 1 1 SENS_BOARD_Z_OFF 0.000000000000000000 9 1 1 SENS_DPRES_OFF 0.000000000000000000 9 1 1 SENS_GPS_MASK 7 6 1 1 SENS_GPS_PRIME 0 6 1 1 SENS_GPS_TAU 10.000000000000000000 9 1 1 SENS_IMU_AUTOCAL 0 6 1 1 SENS_IMU_MODE 1 6 1 1 SENS_MAG_AUTOCAL 0 6 1 1 SENS_MAG_AUTOROT 0 6 1 1 SENS_MAG_MODE 1 6 1 1 SENS_MAG_RATE 15.000000000000000000 9 1 1 SENS_MAG_SIDES 63 6 1 1 SYS_AUTOCONFIG 0 6 1 1 SYS_AUTOSTART 4001 6 1 1 SYS_CAL_TDEL 24 6 1 1 SYS_CAL_TMAX 10 6 1 1 SYS_CAL_TMIN 5 6 1 1 SYS_FAC_CAL_MODE 0 6 1 1 SYS_FAILURE_EN 0 6 1 1 SYS_HAS_BARO 1 6 1 1 SYS_HAS_GPS 1 6 1 1 SYS_HAS_MAG 1 6 1 1 SYS_HAS_NUM_DIST 0 6 1 1 SYS_HITL 0 6 1 1 SYS_MC_EST_GROUP 2 6 1 1 SYS_RGB_MAXBRT 1.000000000000000000 9 1 1 SYS_STCK_EN 1 6 1 1 SYS_VEHICLE_RESP -0.400000005960464478 9 1 1 THR_MDL_FAC 0.899999976158142090 9 1 1 TRIG_MODE 0 6 1 1 UAVCAN_ENABLE 0 6 1 1 VOXL_ESC_BAUD 2000000 6 1 1 VOXL_ESC_CONFIG 1 6 1 1 VOXL_ESC_FUNC1 102 6 1 1 VOXL_ESC_FUNC2 103 6 1 1 VOXL_ESC_FUNC3 101 6 1 1 VOXL_ESC_FUNC4 104 6 1 1 VOXL_ESC_MODE 0 6 1 1 VOXL_ESC_PUB_BST 1 6 1 1 VOXL_ESC_REV 0 6 1 1 VOXL_ESC_RPM_MAX 15000 6 1 1 VOXL_ESC_RPM_MIN 2000 6 1 1 VOXL_ESC_SDIR1 0 6 1 1 VOXL_ESC_SDIR2 0 6 1 1 VOXL_ESC_SDIR3 0 6 1 1 VOXL_ESC_SDIR4 0 6 1 1 VOXL_ESC_T_COSP 0.990000009536743164 9 1 1 VOXL_ESC_T_DEAD 20 6 1 1 VOXL_ESC_T_EXPO 35 6 1 1 VOXL_ESC_T_MINF 0.150000005960464478 9 1 1 VOXL_ESC_T_OVER 0 6 1 1 VOXL_ESC_T_PERC 90 6 1 1 VOXL_ESC_T_WARN 0 6 1 1 VOXL_ESC_VLOG 1 6 1 1 VTO_LOITER_ALT 80.000000000000000000 9 1 1 VT_B_DEC_MSS 2.000000000000000000 9 1 1 WV_EN 0 6 1 1 WV_GAIN 1.000000000000000000 9 1 1 WV_ROLL_MIN 1.000000000000000000 9 1 1 WV_YRATE_MAX 90.000000000000000000 9 1 1 XRCE_DDS_DOM_ID 0 6 1 1 XRCE_DDS_KEY 1 6 -
Timeline for open-vins documentation@Zachary-Lowell-0 yep i i've constantly updating the stack and rerun
voxl-configure-mpa. what parameters do you exactly need from PX4? -
Timeline for open-vins documentation@Zachary-Lowell-0 sure; basically 20% of the time it is working when i'm flying the drone around.
at the moment it is:
- constantly loosing Z axis estimate, so it is just shooting up to the air uncontrollably
- loosing speed estimation and then just shoots out to some random direction
- the yaw estimates; again getting uncontrollable.
so yeah at the moment i have 4 starling drones (mostly v2) and they are really not usable most of the time with qvio.
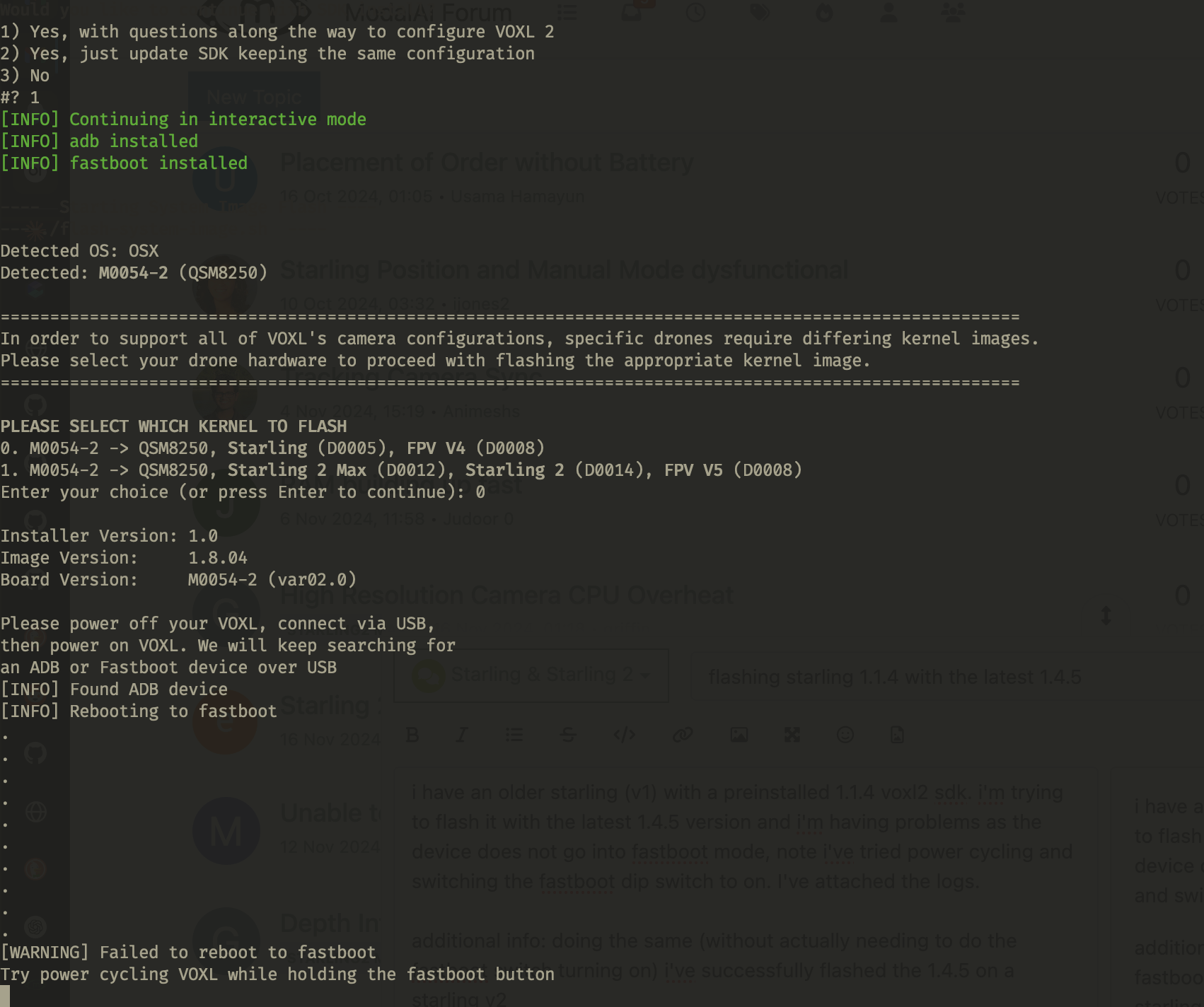{kind=link}