@tom thank you for your assistance. I'll do that.
Posts
-
VOXL not detecting USB and wifi -
VOXL not detecting USB and wifi@Kiazoa-Joao I tried that, but it's not detecting it at all, it's like it's not even there
-
VOXL not detecting USB and wifi@tom I will. Thank you
-
VOXL not detecting USB and wifi@tom I am using Windows 64-bit operating system, sometimes I use Linux
-
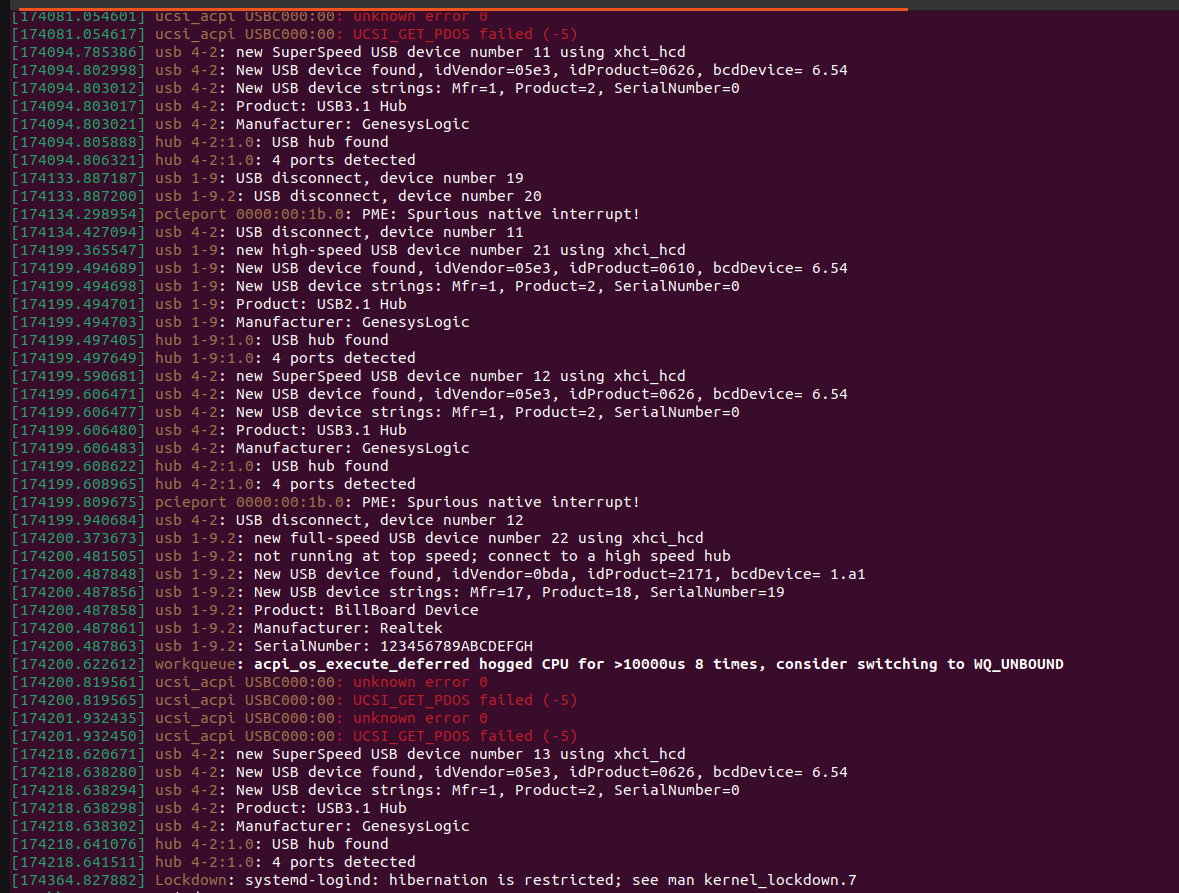
VOXL not detecting USB and wifiHello! Can anybody help me with this, please? I am truly desperate.
I am having problems trying to connect to my VOXL m500's wifi and USB port. The wifi won't appear at all and the USB (for adb) won't connect to my computer either. I visually inspected the drone to check for any signs of damage, but it looks fine and nothing seems to be disconnected. The drone powers up normally, and I have tried using different USB cables. Any troubleshooting tips would be greatly appreciated. (for context, I flew the drone a few weeks ago, but it lost communication after my last mission)
-
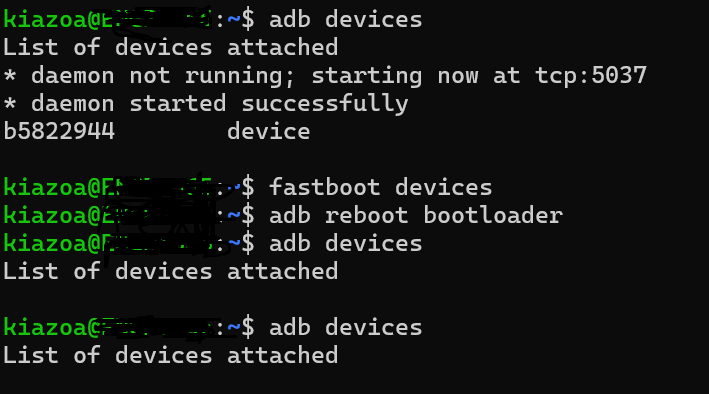
Cannot access wifi and USB@Avery-Cuevas Yes, the VOXL powers up and I've tried using different USBs and still no result. I even tried reflashing the system, but it won't detect fastboot and adb devices
-
Cannot access wifi and USBHello!
I am having problems trying to connect to my VOXL m500's wifi and USB port. The wifi won't appear at all and the USB (for adb) won't connect to my computer either. I visually inspected the drone to check for any signs of damage, but it looks fine and nothing seems to be disconnected. Any troubleshooting tips would be greatly appreciated. (for context, I flew the drone a few weeks ago, but it lost communication after my last mission)
-
Voxl-mapperHello! Quick question! I have a m500 (Voxl-flight) drone and I am trying to run the voxl-mapper on the portal. I am wondering if I will need to purchase a TOF sensor separately. The drone came with Hires 4k Image Sensor and Stereo Image Sensors. is a TOF sensor required for the mapper to work? Thank you in advance.
-
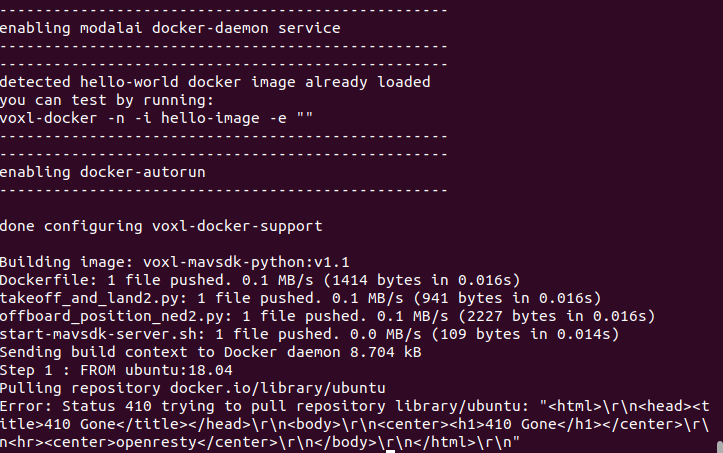
Docker MAVSDK@Mohammad-Goli I had a really hard time building it. This is basically what I did:
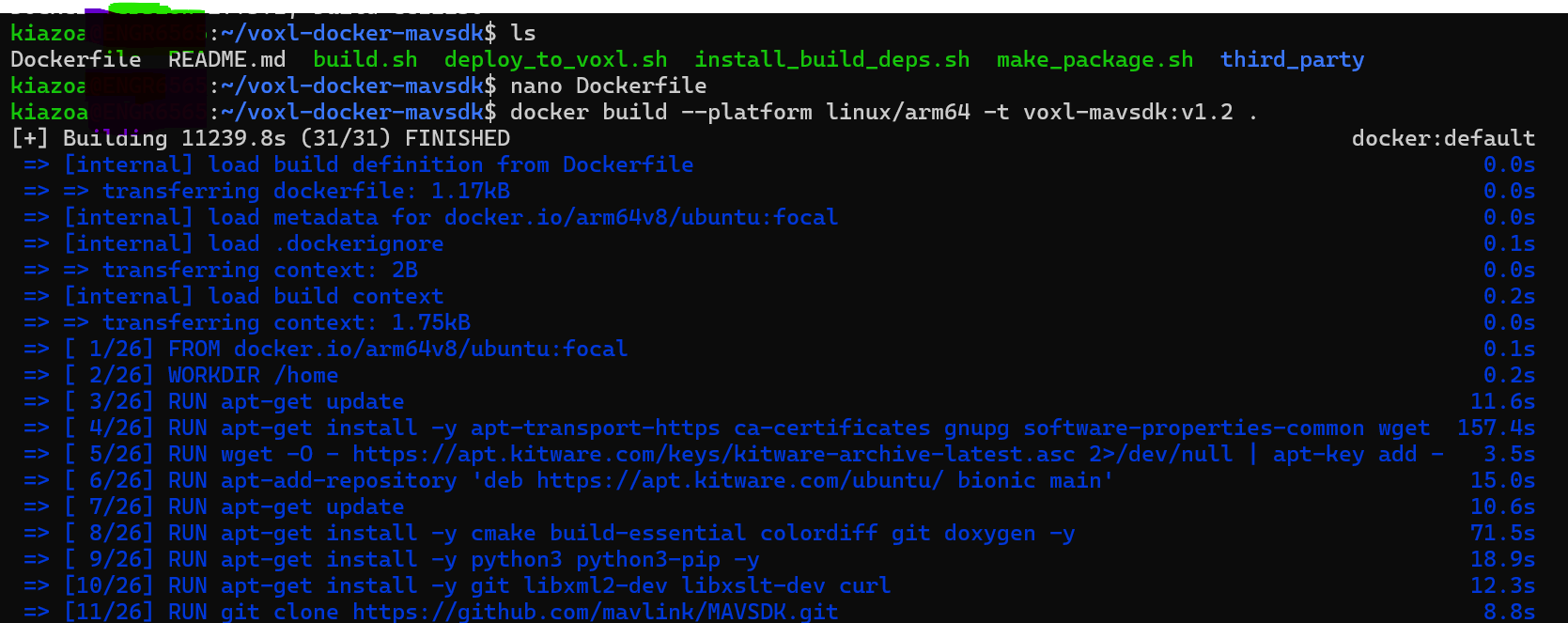
I had to manually build it.
After that, I just followed the instructions and this is what I got, but I found an error at the end.

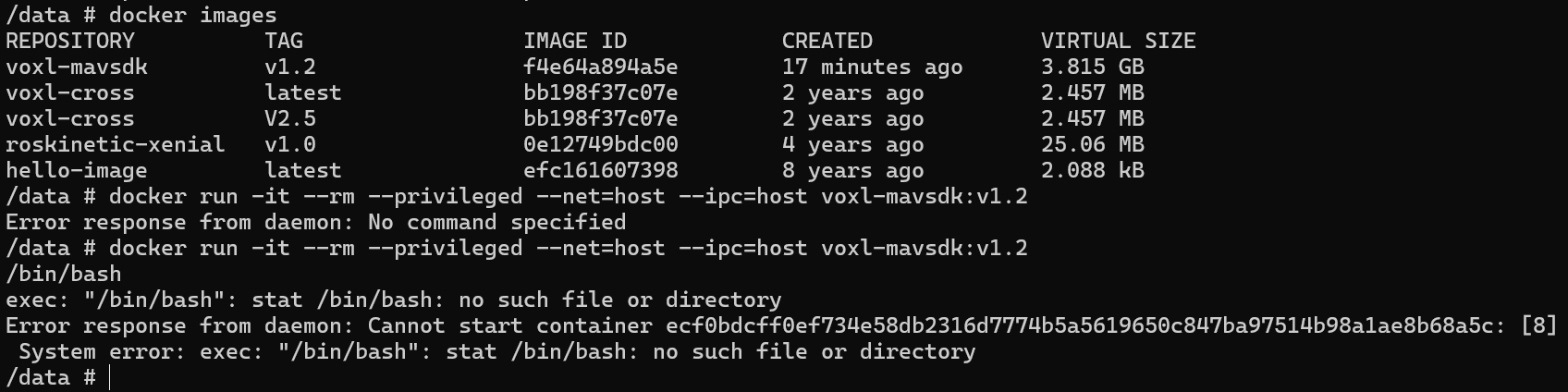
I had to use this command to be able to import the image:
cat /data/tmp/voxl-mavsdk:v1.2.tar.gz | docker import - voxl-mavsdk:v1.2But now I can't run it. Hopefully, someone on here can help with this.
-
Docker MAVSDK@Zachary-Lowell-0 I was able to build the image on a parent computer and then push it onto my voxl-flight. However, I am having a hard time running it. Can you please help me with that?
-
Docker MAVSDK@Zachary-Lowell-0 I get what you mean. I'll try to re-build it and let you know if get any errors. Thank you.
-
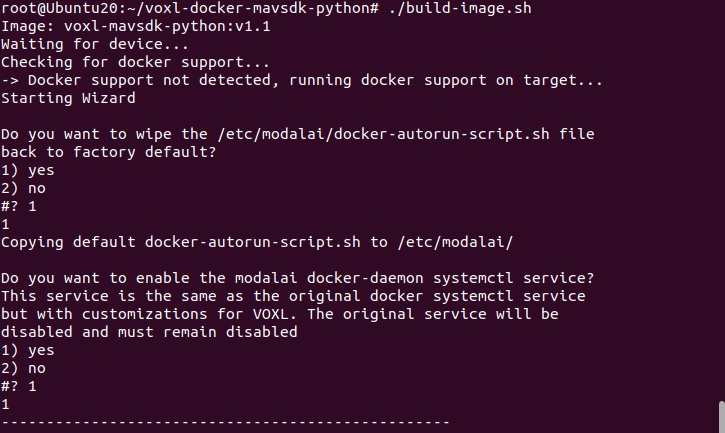
Docker MAVSDK@Zachary-Lowell-0 I tried to follow the instructions and these are the errors I got. I tried it on a parent computer. Also, I don't have a Voxl2, I have a voxl-flight. is it only supposed to work on the voxl2?
-
Docker MAVSDKHello! I've been trying to run the voxl-docker-mavsdk-python, but I got the following errors. Does anybody know what's wrong? it says it can't find the image.

-
figure 8@Eric-Katzfey Thank you so much
-
figure 8Hello! Quick question, Can the figure 8 path be modified to follow a different trajectory? I have a m500 (VOXL-flight). Please let me know
-
VOXL Flight image will not flash@tom Thank you. I'll look it up.
-
VOXL Flight image will not flash@tom you were right. I used a Linux system and it worked flawlessly. Thank you for your assistance. I am just curious to know if the fastboot drivers can be installed on my windows device, just for the future. Please let me know
-
VOXL Flight image will not flash@tom I see. Can they be easily installed?
-
VOXL Flight image will not flash@tom I managed to get WSL to work and the same thing is happeing, I don't know if running it on a Linux system will be any better, but I'll will give it a try.
-
VOXL Flight image will not flash@tom yes I did. I don't have a linux system. I tried WSL, but It won't show the adb devices. However, I'll try to borrow a Linux system from someone on Monday and will let you know if it works. Thank you for your assistance.