@James-Strawson The failed batteries include both types, with a higher occurrence among the Gaoneng packs.
Latest posts made by Mohammad Goli
-
RE: Batteries charging errorposted in Power Modules
-
RE: Docker MAVSDKposted in Ask your questions right here!
@Kiazoa-Joao How did you build it on the target platform? Could you specify the exact commands you used? Did you encounter any errors like those reported by @Gary-Holmgren? Are you using voxl-cross to build it?
-
RE: Docker MAVSDKposted in Ask your questions right here!
@Gary-Holmgren I have the same issue, same errors both with and without voxl-cross. Any luck with building on parent/host computer?
-
Batteries charging errorposted in Power Modules
We have the Starling Max 2, and the Sentinel drones from ModalAI. However, we’ve been experiencing significant issues with the batteries of Starling Max 2. Initially, 3 batteries failed, so I ordered 4 new sets. Unfortunately, two of these new batteries are no longer charging and display either a short error or a low voltage error on our Dynamite Prophet Sport Quad charger (Picture attached).
Here’s how we typically operate the drone:
• When using batteries: We connect both batteries simultaneously to the Starling terminals.
• When using the wall charger: We use a jumper cable to short one terminal and connect the wall charger to the other terminal.
Could you please assist with troubleshooting this issue? Should I return the batteries or the drone for diagnostics?
I’d appreciate your guidance.Thanks,

-
RE: Error when lunching voxl_mpa_to_ros.launchposted in ROS
All our robots are currently operating on ROS1, and we haven’t transitioned to ROS2 yet. Any help, advice, or guidance on this would be greatly appreciated. Thank you!
-
RE: Error when lunching voxl_mpa_to_ros.launchposted in ROS
To resolve the issue with the missing shared library, I followed these steps:
Download the YAML-CPP source code archive:
wget https://github.com/jbeder/yaml-cpp/archive/refs/tags/yaml-cpp-0.5.3.tar.gz
Extract the archive:
tar -xvf yaml-cpp-0.5.3.tar.gzNavigate to the extracted directory and create a build directory:
cd yaml-cpp-0.5.3
mkdir build
cd buildConfigure the build with CMake, enabling shared libraries and setting the installation prefix:
cmake .. -DBUILD_SHARED_LIBS=ON -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/localCompile the library:
make -j$(nproc)Install the compiled library:
sudo make installUpdate the shared library cache:
sudo ldconfigAfter completing these steps, the shared library issue was resolved successfully.
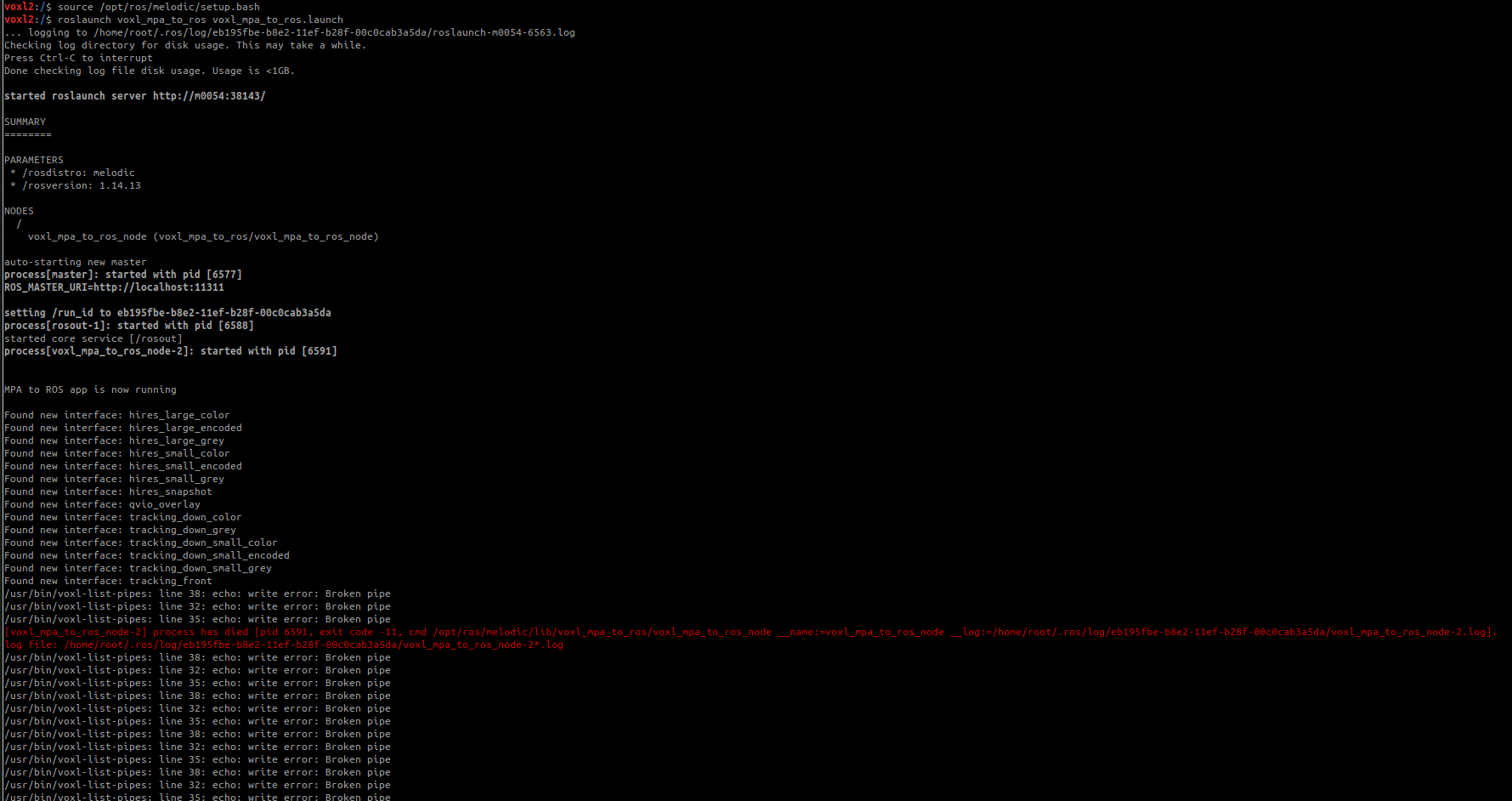
However, now when I run the launch file I get the following error ( echo: write error: Broken pipe)
voxl2:/$ roslaunch voxl_mpa_to_ros voxl_mpa_to_ros.launch
... logging to /home/root/.ros/log/eb195fbe-b8e2-11ef-b28f-00c0cab3a5da/roslaunch-m0054-6563.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.started roslaunch server http://m0054:38143/
SUMMARY
PARAMETERS
- /rosdistro: melodic
- /rosversion: 1.14.13
NODES
/
voxl_mpa_to_ros_node (voxl_mpa_to_ros/voxl_mpa_to_ros_node)auto-starting new master
process[master]: started with pid [6577]
ROS_MASTER_URI=http://localhost:11311setting /run_id to eb195fbe-b8e2-11ef-b28f-00c0cab3a5da
process[rosout-1]: started with pid [6588]
started core service [/rosout]
process[voxl_mpa_to_ros_node-2]: started with pid [6591]MPA to ROS app is now running
Found new interface: hires_large_color
Found new interface: hires_large_encoded
Found new interface: hires_large_grey
Found new interface: hires_small_color
Found new interface: hires_small_encoded
Found new interface: hires_small_grey
Found new interface: hires_snapshot
Found new interface: qvio_overlay
Found new interface: tracking_down_color
Found new interface: tracking_down_grey
Found new interface: tracking_down_small_color
Found new interface: tracking_down_small_encoded
Found new interface: tracking_down_small_grey
Found new interface: tracking_front
/usr/bin/voxl-list-pipes: line 38: echo: write error: Broken pipe
/usr/bin/voxl-list-pipes: line 32: echo: write error: Broken pipe
/usr/bin/voxl-list-pipes: line 35: echo: write error: Broken pipe
[voxl_mpa_to_ros_node-2] process has died [pid 6591, exit code -11, cmd /opt/ros/melodic/lib/voxl_mpa_to_ros/voxl_mpa_to_ros_node __name:=voxl_mpa_to_ros_node __log:=/home/root/.ros/log/eb195fbe-b8e2-11ef-b28f-00c0cab3a5da/voxl_mpa_to_ros_node-2.log].
log file: /home/root/.ros/log/eb195fbe-b8e2-11ef-b28f-00c0cab3a5da/voxl_mpa_to_ros_node-2.log*
/usr/bin/voxl-list-pipes: line 38: echo: write error: Broken pipe
/usr/bin/voxl-list-pipes: line 32: echo: write error: Broken pipe
/usr/bin/voxl-list-pipes: line 35: echo: write error: Broken pipe
/usr/bin/voxl-list-pipes: line 38: echo: write error: Broken pipe
/usr/bin/voxl-list-pipes: line 32: echo: write error: Broken pipe
/usr/bin/voxl-list-pipes: line 35: echo: write error: Broken pipe
/usr/bin/voxl-list-pipes: line 38: echo: write error: Broken pipe
/usr/bin/voxl-list-pipes: line 32: echo: write error: Broken pipe
/usr/bin/voxl-list-pipes: line 35: echo: write error: Broken pipe
I appreciate if someone can provide any help on this.
Thanks,
-
Error when lunching voxl_mpa_to_ros.launchposted in ROS
Hi,
I installed ROS on our VOXL2 machine following this guide:
https://docs.modalai.com/ros-installation-voxl2/when I try to run the voxl_mpa_to_ros node, by running the below command, it runs roscore correctly but gives an error with the actual node:
voxl2:~/$ roslaunch voxl_mpa_to_ros voxl_mpa_to_ros.launch
here is the error:/opt/ros/melodic/lib/voxl_mpa_to_ros/voxl_mpa_to_ros_node: error while loading shared libraries: libyaml-cpp.so.0.5: cannot open shared object file: No such file or directory
failed to start local process: /opt/ros/melodic/lib/voxl_mpa_to_ros/voxl_mpa_to_ros_node __name:=voxl_mpa_to_ros_node __log:=/home/root/.ros/log/887bafd6-a917-11ef-818d-00c0cab3a5da/voxl_mpa_to_ros_node-2.log
local launch of voxl_mpa_to_ros/voxl_mpa_to_ros_node failed
[voxl_mpa_to_ros_node-2] process has died [pid -1, exit code 127, cmd /opt/ros/melodic/lib/voxl_mpa_to_ros/voxl_mpa_to_ros_node __name:=voxl_mpa_to_ros_node __log:=/home/root/.ros/log/887bafd6-a917-11ef-818d-00c0cab3a5da/voxl_mpa_to_ros_node-2.log].
log file: /home/root/.ros/log/887bafd6-a917-11ef-818d-00c0cab3a5da/voxl_mpa_to_ros_node-2*.logI appreciate your advice on how to fix this.
Thanks