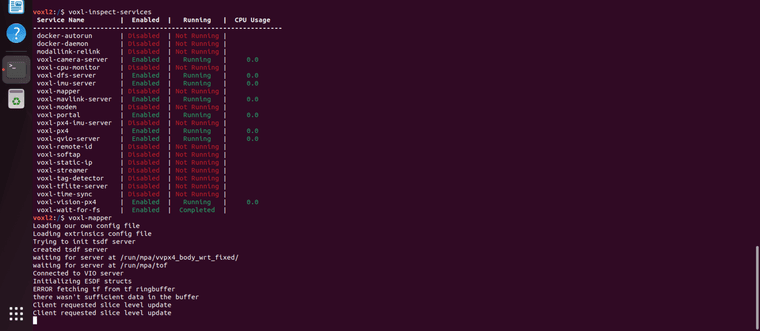
@tom I had a similar problem, except I couldn't get fastboot to reload. I ran it on a computer that boots up with Ubuntu and it flashed the drone perfectly fine, although the blue LEDs are flashing really fast and at the same rate, the GPS is blinking red but that might be something else I'm missing.
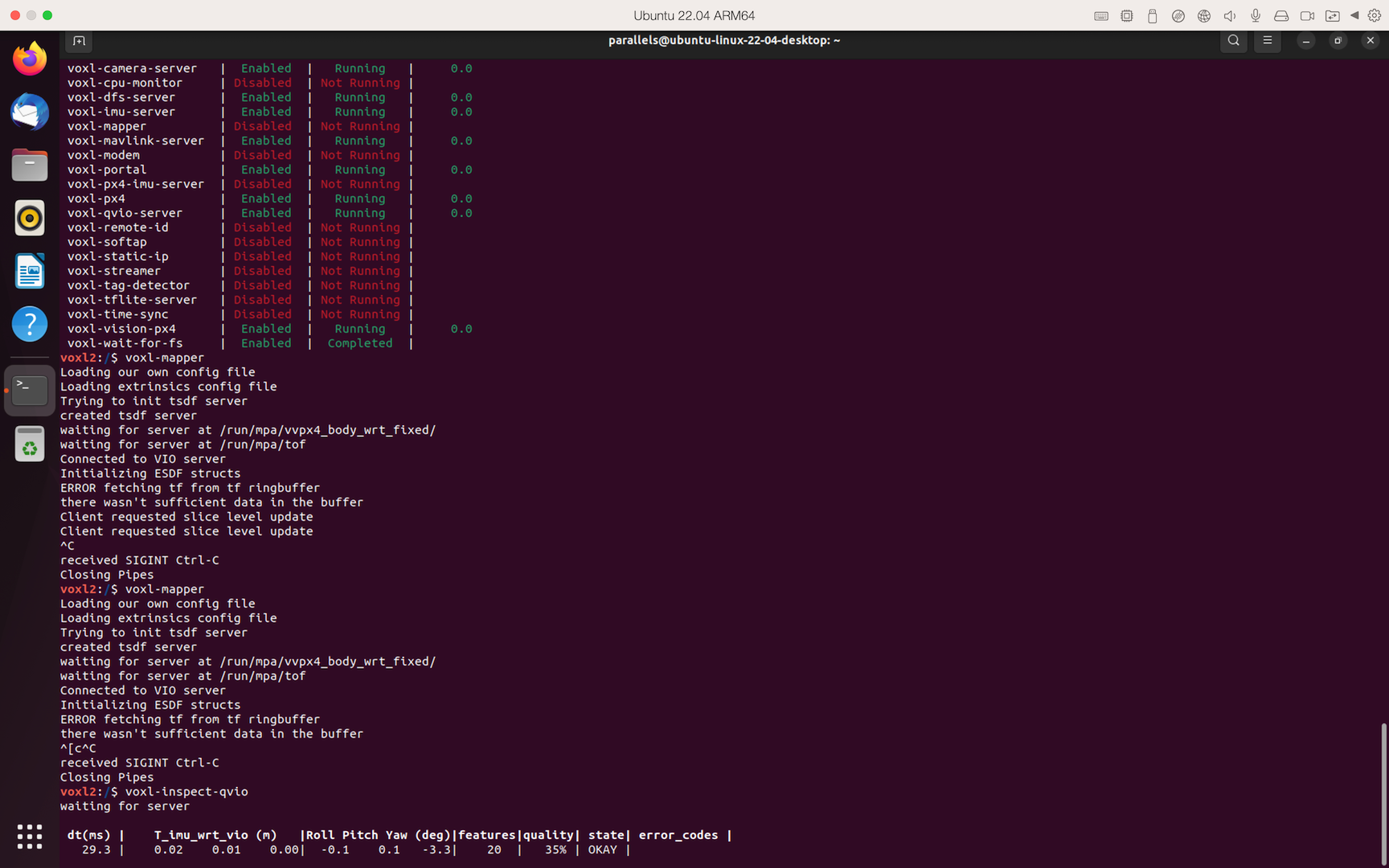
I was running Ubuntu 22.04 ARM64 with Parallels desktop on my MacBook Pro 2021 and tried flashing process on there. That's where I have the usb connected to on the Ubuntu virtual computer and that's the recommended developer OS to operate in it. I can access files on my Mac on Ubuntu (through parallels shared folders) to iCloud and it successfully uploaded to iCloud.
However, it failed to reboot to fast boot even after installing fastboot on Ubuntu. Here's the error. I tried it while powercycling and reinstalling fast boot but it didn't work on my Mac:
Running in Interactive mode.
Flashing the following System Image:
Build Name: 1.6.2-M0054-14.1a-perf
Build Date: 2023-05-19
Platform: M0054
System Image Version: 1.6.2
Installing the following version of voxl-suite:
voxl-suite Version: 1.0.0
Would you like to continue with SDK install?
- Yes
- No
#? 1
[INFO] adb installed
[INFO] fastboot installed
----Starting System Image Flash----
Detected OS: Linux
Installer Version: 0.8
Image Version: 1.6.2
Please power off your VOXL, connect via USB,
then power on VOXL. We will keep searching for
an ADB or Fastboot device over USB
[INFO] Found ADB device
[INFO] Rebooting to fastboot
.
.
.
.
.
.
.
.
.
.
[WARNING] Failed to reboot to fastboot
Try power cycling VOXL while holding the fastboot button
[INFO] Found ADB device
[INFO] Rebooting to fastboot
.
.
.
.
.
.
.
.
.
.
[WARNING] Failed to reboot to fastboot
Try power cycling VOXL while holding the fastboot button
^C
The issue is resolved but I just wanted to share it here.