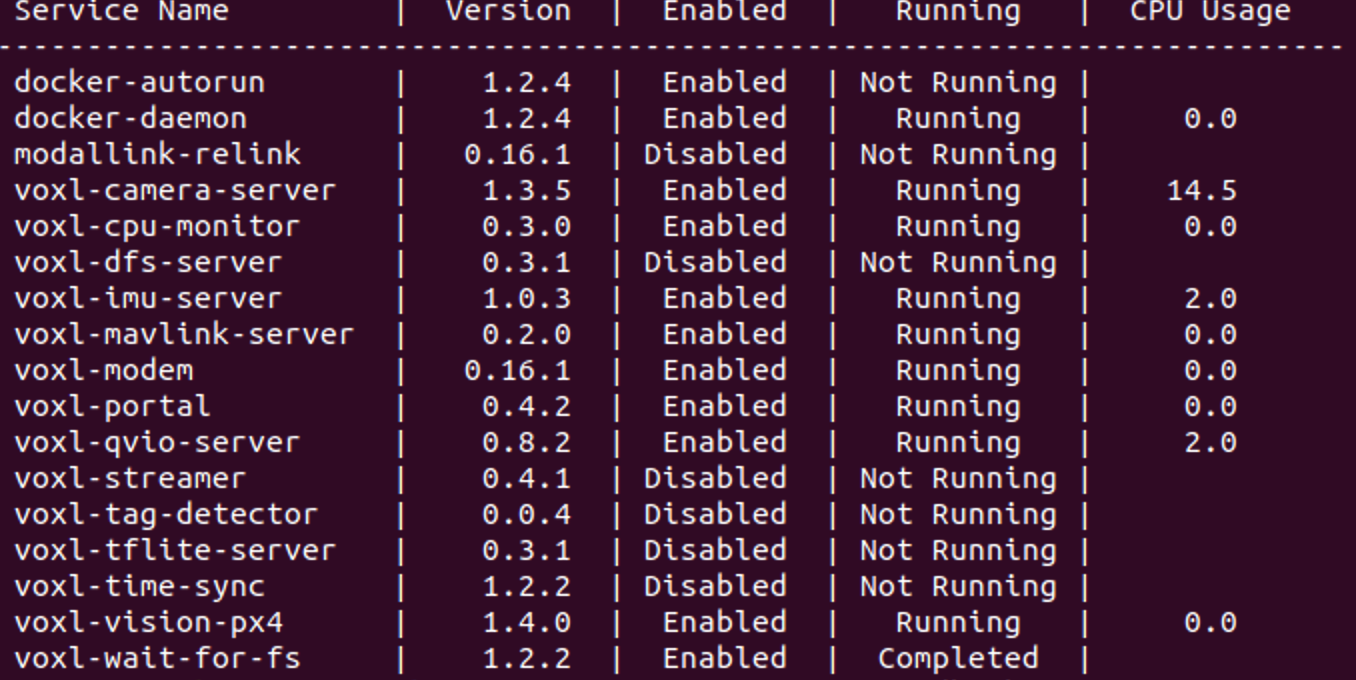
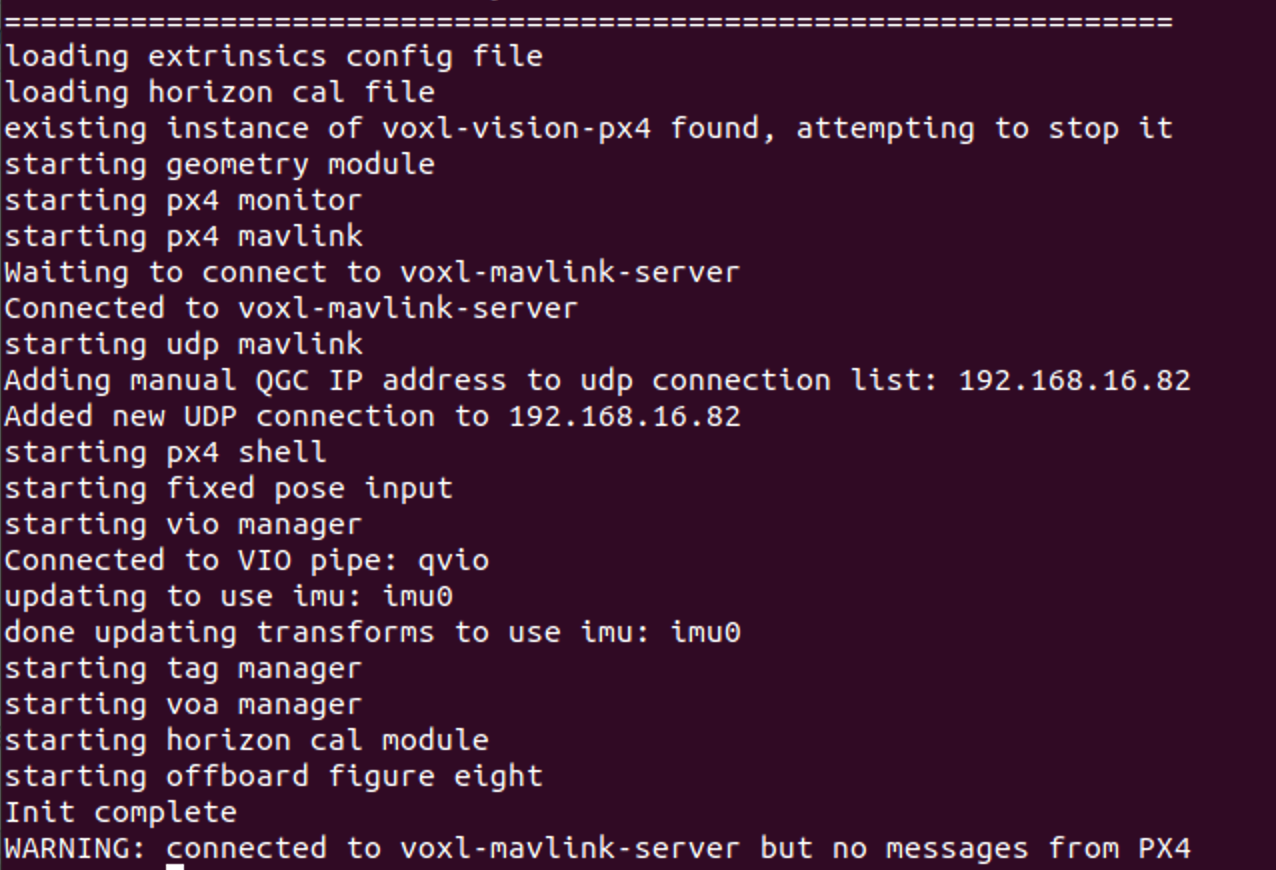
@Moderator Some of the information from one of the problem units (not seeing obvious issues with UDP and routing between FCv2 and VOXL). Also not seeing obvious wiring problems:
Again, we can connect to QGC via USB but not over wifi. We are able to ssh into VOXL.
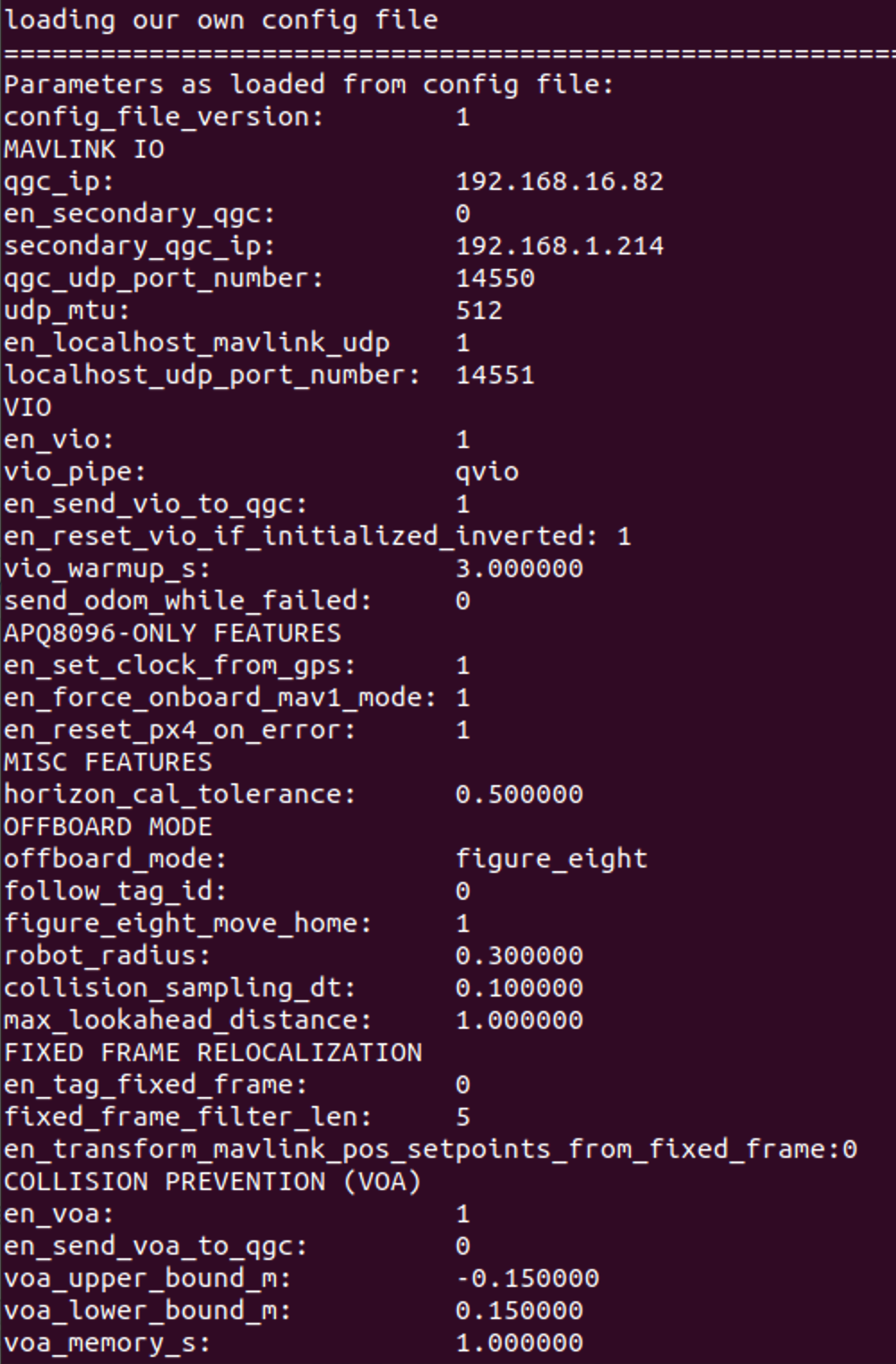
voxl-vision-px4.conf:
{
"config_file_version": 1,
"qgc_ip": "192.168.8.97",
"en_secondary_qgc": false,
"secondary_qgc_ip": "192.168.1.214",
"qgc_udp_port_number": 14550,
"udp_mtu": 512,
"en_localhost_mavlink_udp": true,
"localhost_udp_port_number": 14551,
"vio_pipe": "qvio",
"en_vio": true,
"en_send_vio_to_qgc": false,
"en_reset_vio_if_initialized_inverted": true,
"vio_warmup_s": 3,
"send_odom_while_failed": false,
"en_set_clock_from_gps": true,
"en_force_onboard_mav1_mode": true,
"en_reset_px4_on_error": true,
"horizon_cal_tolerance": 0.5,
"offboard_mode": "off",
"follow_tag_id": 0,
"figure_eight_move_home": true,
"robot_radius": 0.300000011920929,
"collision_sampling_dt": 0.1,
"max_lookahead_distance": 1,
"en_tag_fixed_frame": false,
"fixed_frame_filter_len": 5,
"en_transform_mavlink_pos_setpoints_from_fixed_frame": false,
"en_voa": true,
"en_send_voa_to_qgc": false,
"voa_upper_bound_m": -0.15000000596046448,
"voa_lower_bound_m": 0.15000000596046448,
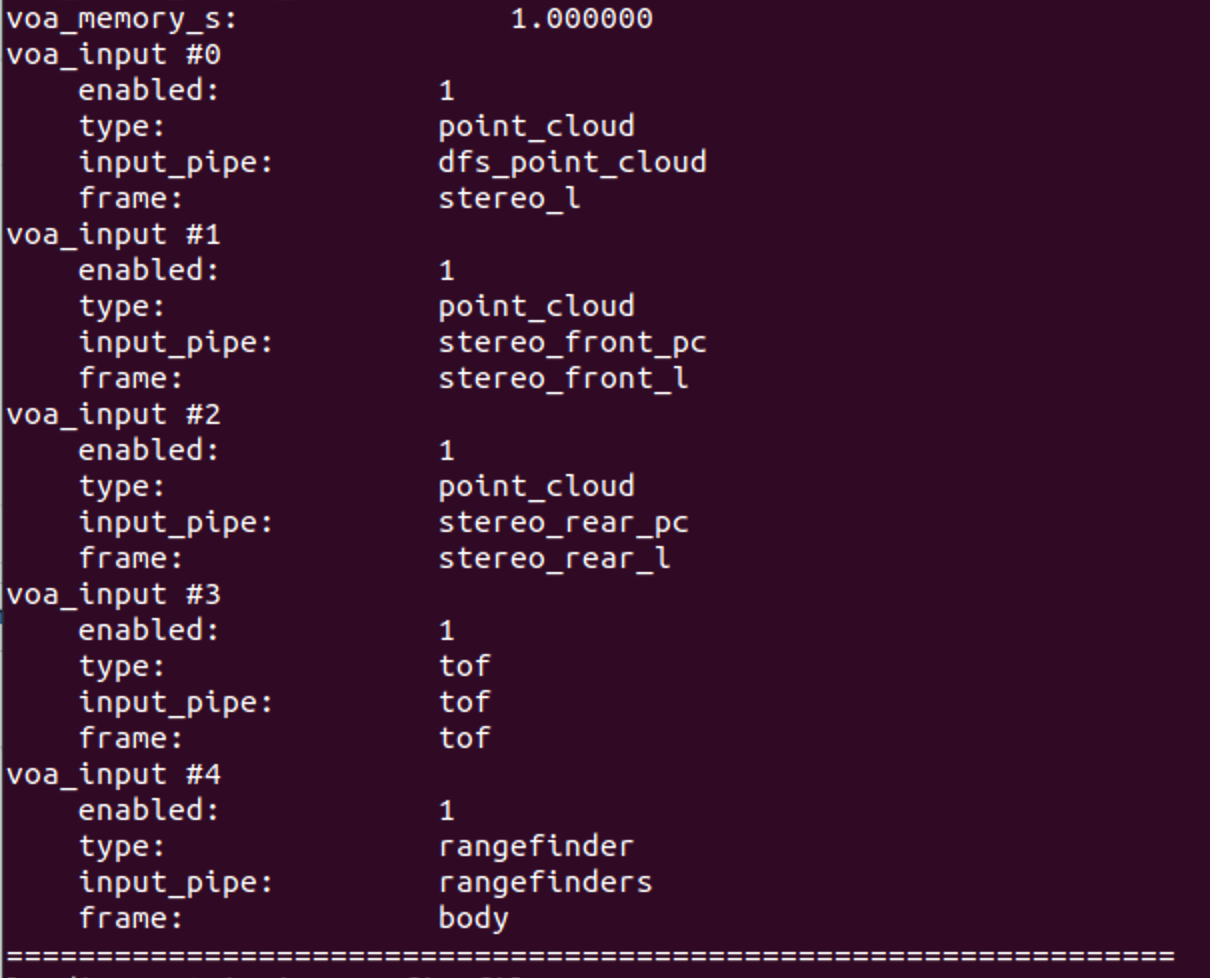
"voa_memory_s": 1,
"voa_inputs": [{
"enabled": true,
"type": "point_cloud",
"input_pipe": "dfs_point_cloud",
"frame": "stereo_l"
}, {
"enabled": true,
"type": "point_cloud",
"input_pipe": "stereo_front_pc",
"frame": "stereo_front_l"
}, {
"enabled": true,
"type": "point_cloud",
"input_pipe": "stereo_rear_pc",
"frame": "stereo_rear_l"
}, {
"enabled": true,
"type": "tof",
"input_pipe": "tof",
"frame": "tof"
}, {
"enabled": true,
"type": "rangefinder",
"input_pipe": "rangefinders",
"frame": "body"
}]
}
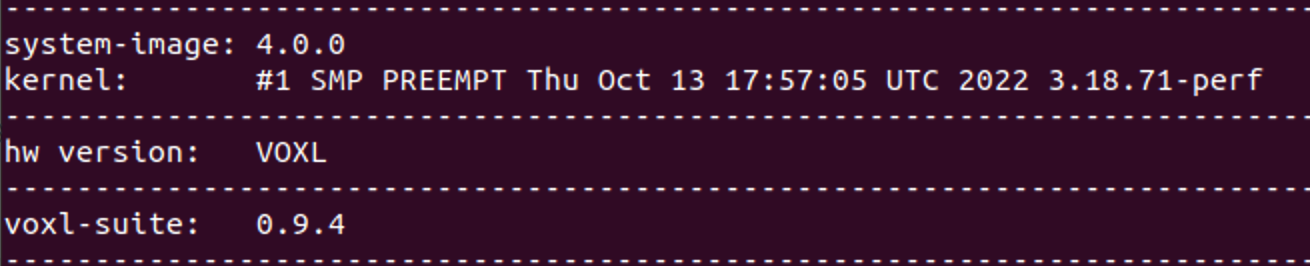
system-image: 4.0.0
kernel: #1 SMP PREEMPT Thu Oct 13 17:57:05 UTC 2022 3.18.71-perf
hw version: VOXL
voxl-suite: 0.9.4
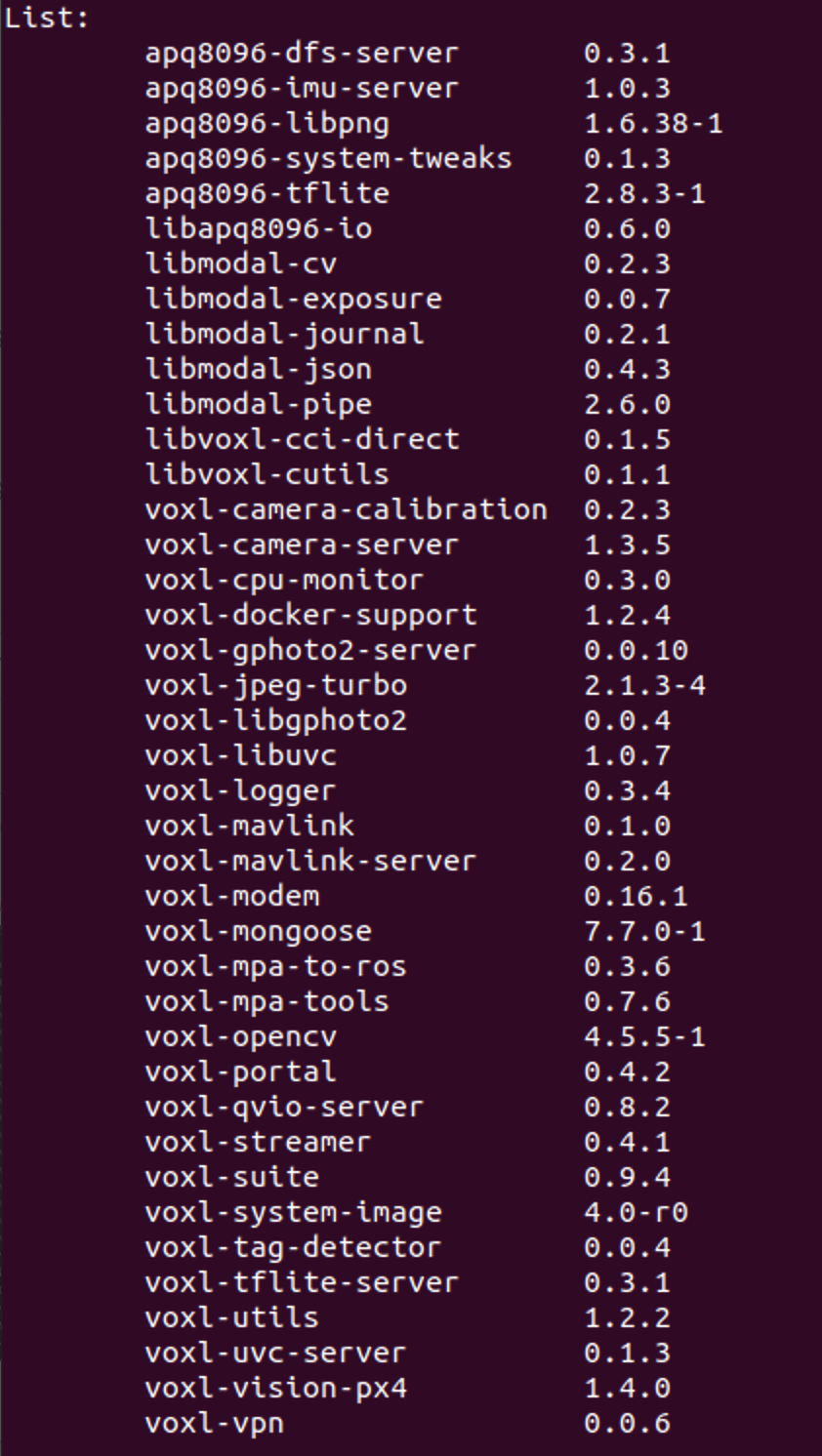
List:
apq8096-dfs-server 0.3.1
apq8096-imu-server 1.0.3
apq8096-libpng 1.6.38-1
apq8096-system-tweaks 0.1.3
apq8096-tflite 2.8.3-1
libapq8096-io 0.6.0
libmodal-cv 0.2.3
libmodal-exposure 0.0.7
libmodal-journal 0.2.1
libmodal-json 0.4.3
libmodal-pipe 2.6.0
libvoxl-cci-direct 0.1.5
libvoxl-cutils 0.1.1
voxl-camera-calibration 0.2.3
voxl-camera-server 1.3.5
voxl-cpu-monitor 0.3.0
voxl-docker-support 1.2.4
voxl-gphoto2-server 0.0.10
voxl-jpeg-turbo 2.1.3-4
voxl-libgphoto2 0.0.4
voxl-libuvc 1.0.7
voxl-logger 0.3.4
voxl-mavlink 0.1.0
voxl-mavlink-server 0.2.0
voxl-modem 0.16.1
voxl-mongoose 7.7.0-1
voxl-mpa-to-ros 0.3.6
voxl-mpa-tools 0.7.6
voxl-opencv 4.5.5-1
voxl-portal 0.4.2
voxl-qvio-server 0.8.2
voxl-streamer 0.4.1
voxl-suite 0.9.4
voxl-system-image 4.0-r0
voxl-tag-detector 0.0.4
voxl-tflite-server 0.3.1
voxl-utils 1.2.2
voxl-uvc-server 0.1.3
voxl-vision-px4 1.4.0
voxl-vpn 0.0.6
FCv2 info from MAVLINK:
HW arch: MODALAI_FC_V2
HW type: V230
HW version: 0x00000003
HW revision: 0x00000000
FW git-hash: 890300a471ddac62c7c3f78b1fff863c419ff360
FW version: Release 1.13.2 (17629951)
OS: NuttX
OS version: Release 11.0.0 (184549631)
OS git-hash: 91bece51afbe7da9db12e3695cdbb4f4bba4bc83
Build datetime: Jan 9 2023 02:27:25
Build uri: localhost
Build variant: default
Toolchain: GNU GCC, 9.3.1 20200408 (release)
PX4GUID: 000600000000343630333436511000150008
MCU: STM32H7[4|5]xxx, rev. Y