@greg_s That would explain a lot what's happening.
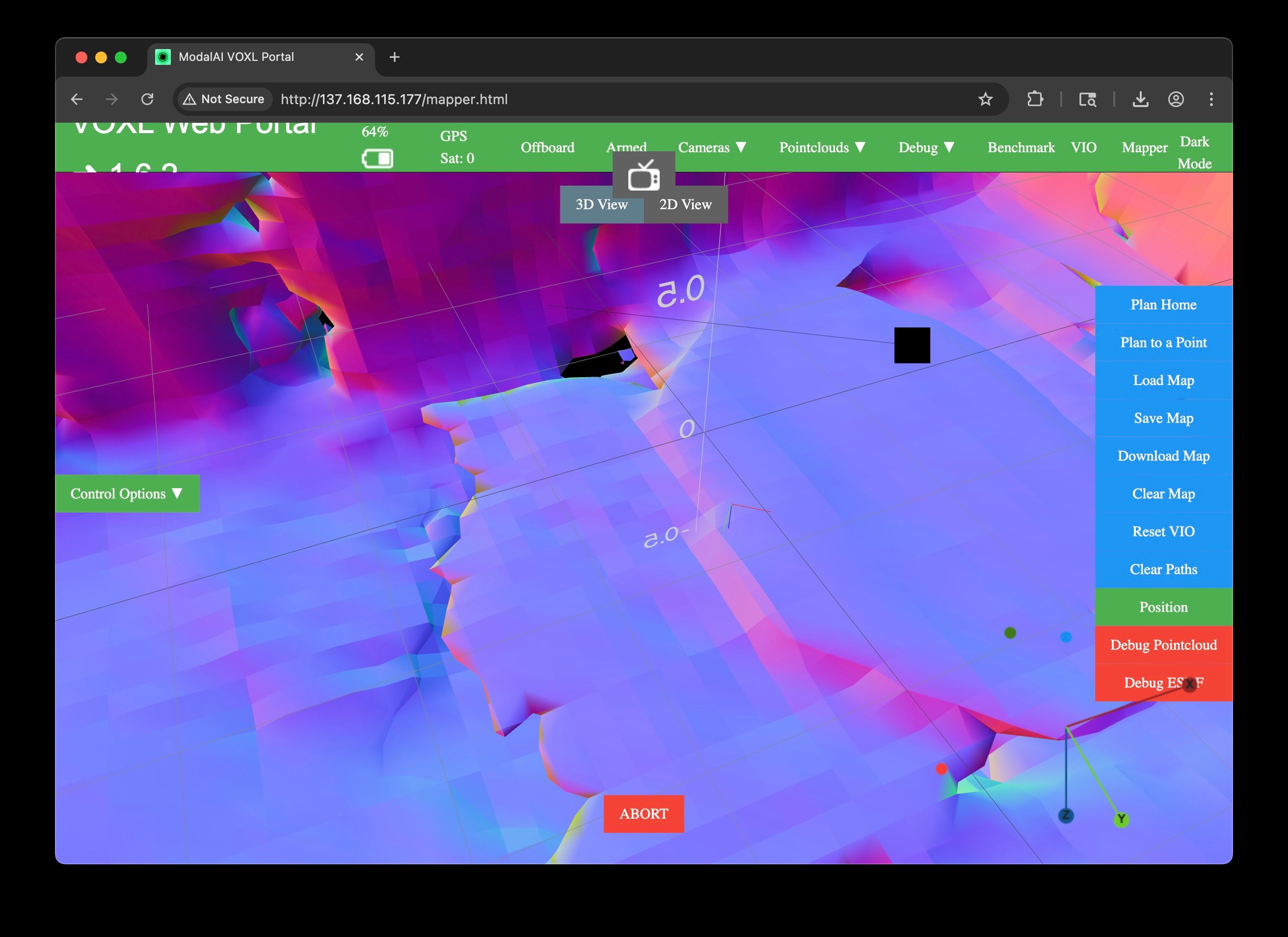
If you start fresh and connect to the drone with voxl-portal and goto the VIO tab/menu option, you should be able to pick up the drone and perform a bench test.
Considering Figure 8 is not working, you will need to inspect the front and downward camera, tighten/remount any loose parts and possibly check camera focus & calibration.
Worse case if the forward camera is good and not changed from factory, you can edit /etc/modalai/vio_cam.conf on the drone and disabled the faulty camera (disabled the down camera).
You'll have degraded precision (mainly bad vio in fast yaw motions), but should be able to perform a figure 8 and should get you running until you repair that bottom sensor.