@DronAlan
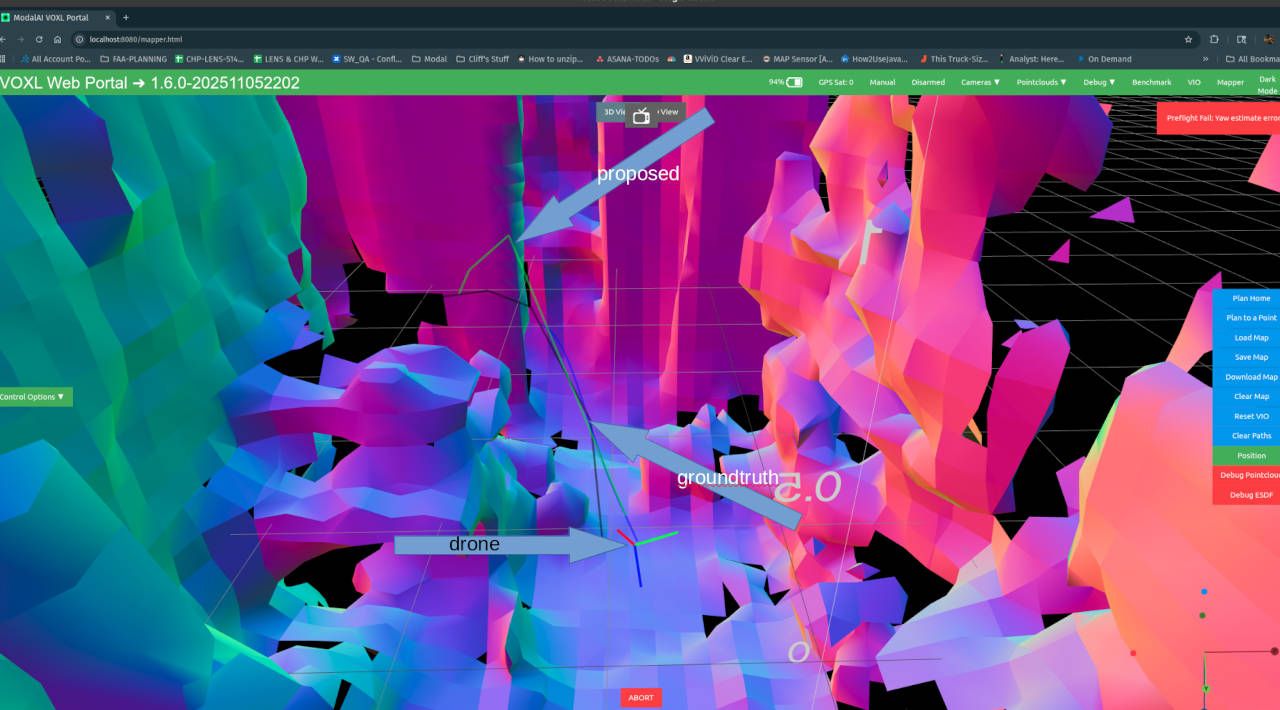
Hi there, the configuration & extrinsics files look fine (just switch offboard mode from figure_eight back to trajectory mode. Since you confirmed figure 8 and position mode are working fine and reflect true ground truth in voxl portal, next is to dive a bit deep into the processes:
Just to confirm: are you using a loaded saved map? Orientation can be different in a loaded maps based on how it was saved. Going forward in debugging this I would create the map while flying, then test plan-to-point to ensure it is working properly.
- Before take off, if you ssh onto the drone and run
voxl-vision-hub --debug_offboardand rerun the mapping test (point 1m in front of the drone hovering), and you don't need to map the entire room, just get the general area. - In the ssh session, monitor the output from
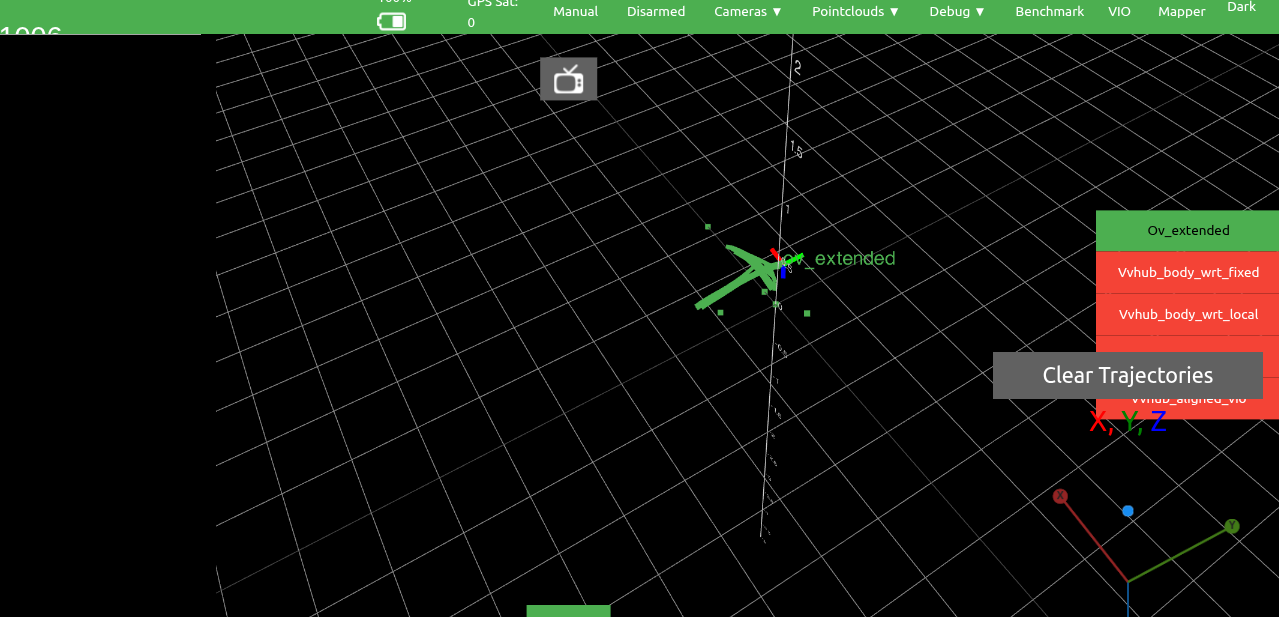
voxl-vision-hub. - Take off and fly forward and backward in position mode, with some slight yaw motions to generate a decent map in voxl portal (recall we're generating a map in flight then plan to fly to a point, not using a old-saved map).
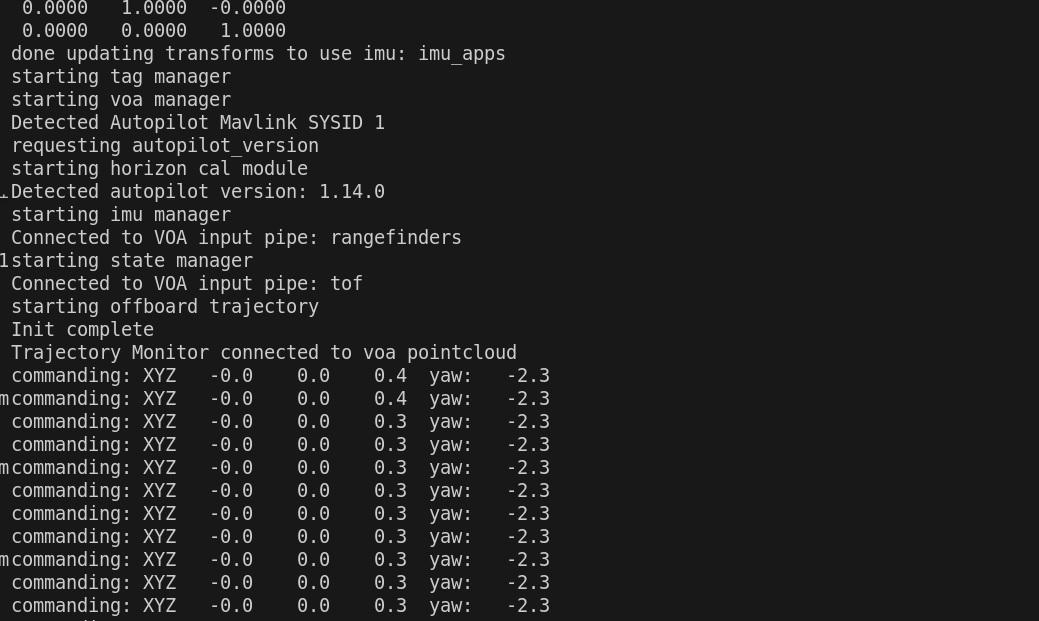
- Then switch into trajectory mode. In the ssh session, you should get a
Received trajectory has durationmessage printed. - Goto voxl-portal and plan-a-point. Then execute go-to-point. In the ssh session you should get a
Received insert command.printed out on the terminal. And it will show the drone's forward commands, i..e set points, to your planned point. I expect thecommanding: XYZvalues to increase in the positive X direction. Please post the output of the ssh session here.
If the drone moves in the backwards direction as you've been seeing but the commanding XYZs are moving forward, we have found our problem (PX4 issue such that I'll need your params file). If the drone moves forward with commanding XYZs are moving forward then it's how your older maps are being saved and we can go from there.
") then we have a trajectory calculation problem on the voxl-mapper side (I'll check our code, but our QA currently show that was working properly).
then we have a trajectory calculation problem on the voxl-mapper side (I'll check our code, but our QA currently show that was working properly).