@James-Strawson
"takeoff_cam": Tells OpenVINS which camera to use for takeoff. This should be a camera where "is_occluded_on_ground" is set to false in vio_cams.conf. Besides this setting, what else needs to be configured?
Latest posts made by tkddnjs825
-
RE: voxl-open-vins-server???posted in Ask your questions right here!
-
voxl-open-vins-server???posted in Ask your questions right here!
I have a question.
I am currently using VOXL2 with SDK 1.4.1 and utilizing dual tracking with the M0173 module. Since I am only flying indoors, I have not attached a GPS module.I am using
voxl-open-vins-server, but I noticed that the documentation and the configuration file contents forvoxl-open-vins-serverare different.Could you provide a summary of the correct
voxl-open-vins-serversetup for SDK 1.4.1? -
voxl-open-vins-serverposted in Ask your questions right here!
Hello,
I am currently using VOXL2 without GPS and utilizing M0173 with tracking_front and tracking_down cameras for indoor flight using voxl-open-vins-server.
My current issue is that the drone, which relies solely on cameras for VIO functionality, does not remain stationary during flight. Instead, it drifts slightly while hovering.
If you could provide an optimized voxl-open-vins-server.conf file, I would greatly appreciate it.
I have attached a video of my flight for reference in the link below.
https://youtube.com/shorts/KrZ4BLoeUB0?feature=share -
RE: VOXL2 custom Camera Configposted in Ask your questions right here!
@Alex-Kushleyev
I have currently set it to C28 and have installed tracking cameras on the front and rear.However, if I disable the remaining cameras, tracking down does not run.
-
VOXL2 dual trackingposted in Ask your questions right here!
Hello
I'm using voxl2 is using voxing.Currently, GPS has three-ups to do not use it.
But there are errors such as photos in the bottom of the picture, but there is a solution?
Additionally, camera calibration is completed.The camera is used to use m0173 by using m0173 and the rest of the restoration.Additionally, in voxl-server, I wanted to use only dimensions, but I don't want to use a dacking.How can I do it?/** * voxl-camera-server Configuration File * * Each camera has configurations for up to 4 HAL3 streams: * - `preview` stream for raw unprocessed images from CV cameras * - `small_video` 720p (ish) h264/h265 compressed for fpv video streaming * - `large_video` 4k (ish) h264/h265 for onboard video recording to disk * - `snapshot` ISP-processed JPG snapshots that get saved to disk * * on QRB5165 platforms (VOXL2 and VOXL2 mini) you can only have 3 of the 4 enabled * * This file is generated from default values by voxl-configure-cameras. * Do not expect arbitrary resolutions to work, the ISP and video compression * pipelines only support very specific resolutions. * * The default video compression mode is cqp or Constant Quantization Parameter * * * */ { "version": 0.1, "fsync_en": true, "fsync_gpio": 109, "cameras": [{ "type": "ar0144", "name": "tracking_front", "enabled": true, "camera_id": 0, "fps": 30, "en_rotate": true, "en_preview": true, "preview_width": 1280, "preview_height": 800, "en_raw_preview": true, "en_misp": true, "misp_width": 1280, "misp_height": 800, "misp_venc_enable": false, "misp_venc_mode": "h264", "misp_venc_br_ctrl": "cqp", "misp_venc_Qfixed": 30, "misp_venc_Qmin": 15, "misp_venc_Qmax": 50, "misp_venc_nPframes": 29, "misp_venc_mbps": 2, "misp_venc_osd": false, "misp_awb": "auto", "ae_mode": "lme_msv", "gain_min": 54, "gain_max": 8000, "ae_desired_msv": 60, "exposure_min_us": 20, "exposure_max_us": 12000, "exposure_soft_min_us": 5000, "ae_filter_alpha": 0.600000023841858, "ae_ignore_fraction": 0.20000000298023224, "ae_slope": 0.05000000074505806, "ae_exposure_period": 1, "ae_gain_period": 1 }, { "type": "imx412", "name": "hires", "enabled": false, "camera_id": 1, "fps": 30, "en_preview": false, "preview_width": 640, "preview_height": 480, "en_raw_preview": false, "en_small_video": true, "small_video_width": 1024, "small_video_height": 768, "small_venc_mode": "h264", "small_venc_br_ctrl": "cqp", "small_venc_Qfixed": 30, "small_venc_Qmin": 15, "small_venc_Qmax": 40, "small_venc_nPframes": 9, "small_venc_mbps": 2, "small_venc_osd": false, "en_large_video": true, "large_video_width": 4056, "large_video_height": 3040, "large_venc_mode": "h264", "large_venc_br_ctrl": "cqp", "large_venc_Qfixed": 40, "large_venc_Qmin": 15, "large_venc_Qmax": 50, "large_venc_nPframes": 29, "large_venc_mbps": 40, "large_venc_osd": false, "en_snapshot": true, "en_snapshot_width": 4056, "en_snapshot_height": 3040, "exif_focal_length": 3.0999999046325684, "exif_focal_length_in_35mm_format": 17, "exif_fnumber": 1.2400000095367432, "ae_mode": "isp", "gain_min": 54, "gain_max": 8000 }, { "type": "pmd-tof-liow2", "name": "tof", "enabled": true, "camera_id": 2, "fps": 10, "en_rotate": true, "ae_mode": "off", "gain_min": 0, "gain_max": 0, "exposure_max_us": 6000, "standby_enabled": false, "decimator": 5 }, { "type": "ar0144", "name": "tracking_down", "enabled": true, "camera_id": 3, "fps": 30, "en_rotate": false, "en_preview": true, "preview_width": 1280, "preview_height": 800, "en_raw_preview": true, "en_misp": true, "misp_width": 1280, "misp_height": 800, "misp_venc_enable": false, "misp_venc_mode": "h264", "misp_venc_br_ctrl": "cqp", "misp_venc_Qfixed": 30, "misp_venc_Qmin": 15, "misp_venc_Qmax": 50, "misp_venc_nPframes": 29, "misp_venc_mbps": 2, "misp_venc_osd": false, "misp_awb": "auto", "ae_mode": "lme_msv", "gain_min": 54, "gain_max": 8000, "ae_desired_msv": 60, "exposure_min_us": 20, "exposure_max_us": 12000, "exposure_soft_min_us": 5000, "ae_filter_alpha": 0.600000023841858, "ae_ignore_fraction": 0.20000000298023224, "ae_slope": 0.05000000074505806, "ae_exposure_period": 1, "ae_gain_period": 1 }] } -
VOXL2 custom Camera Configposted in Ask your questions right here!
Hello
I'm currently using VOXL2 and I'm using M0173. But I only want to use tracking_front and tracking_down of the image sensor here, but I don't know how to set up the image sensor.
Additionally, how can I write custom-camera-config in /data/modalai? -
RE: Dual Tracking qvioposted in Ask your questions right here!
@tom
Thank you for your response.
If I upgrade the SDK to 1.4.0 and use voxl-open-vins-server, are there any additional settings I need to configure? -
Dual Tracking qvioposted in Ask your questions right here!
Hello, I am currently using VOXL2 with a dual tracking (AR0144) camera setup. I have selected C26 in voxl-configure-cameras.
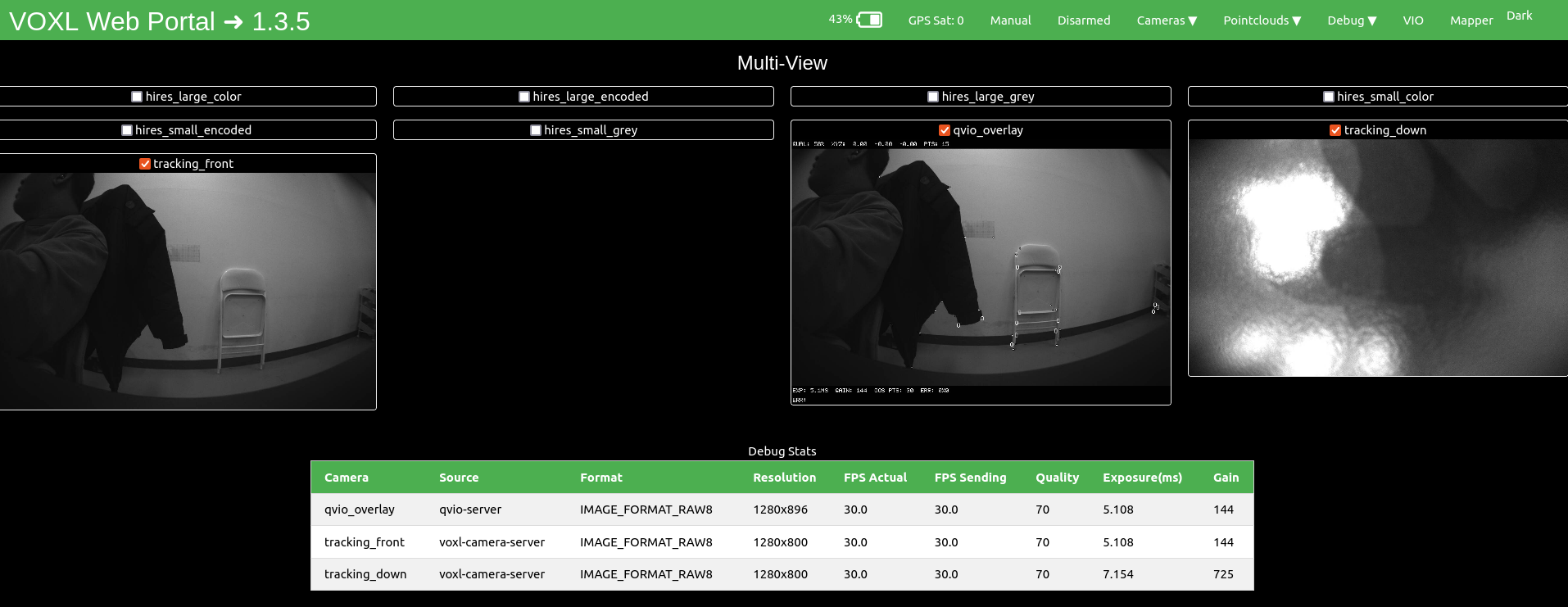
When I access the VOXL Web Portal, I see that the QVIO overlay is only using the front tracking camera. However, I would like to use both the front tracking and down tracking cameras together for the QVIO overlay.
Could you please guide me on how to configure this?
Thank you.
-
RE: voxl2 to jetson uartposted in Ask your questions right here!
@Alex-Kushleyev ,
Thank you for your response.Currently, I am using the MDK-M0062-3-00 board. The reason for using this board is that I previously connected the VOXL and Jetson via Ethernet. However, since there is now only one Ethernet port on the Jetson, I need to use it for other purposes, and there are additional reasons as well. Therefore, I am trying to work using UART.
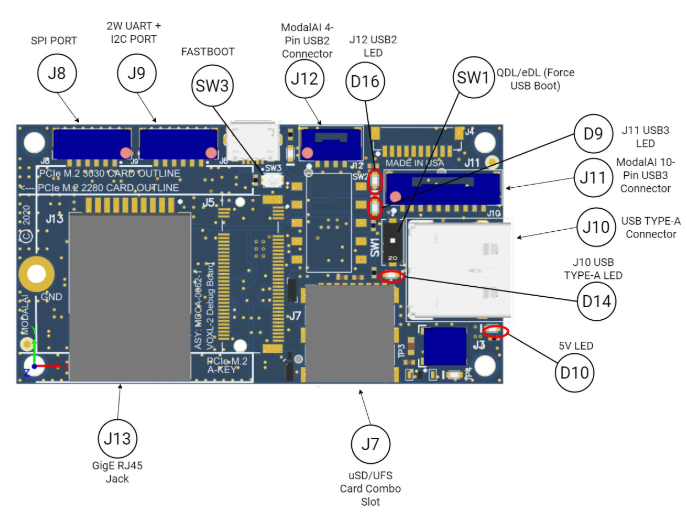
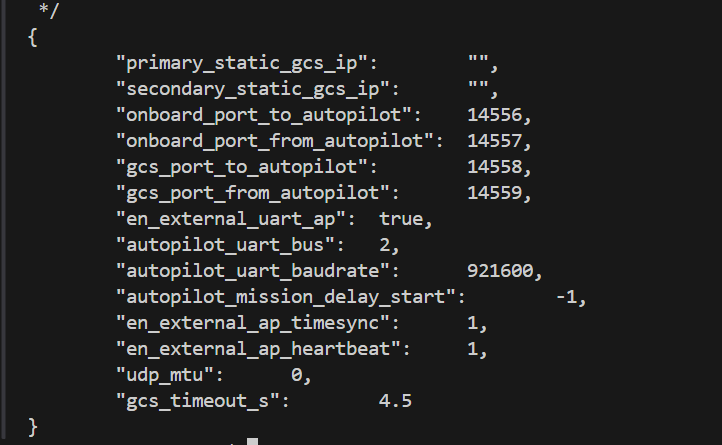
I have an additional question. Currently, I am using the MDK-M0062-3-00 board, and for the UART port, I am using J9. The UART port is recognized as /dev/ttyHS2, and I am working with it. The voxl-mavlink-server.conf is currently configured as shown in the image below. I would like to know if this setup is correct.
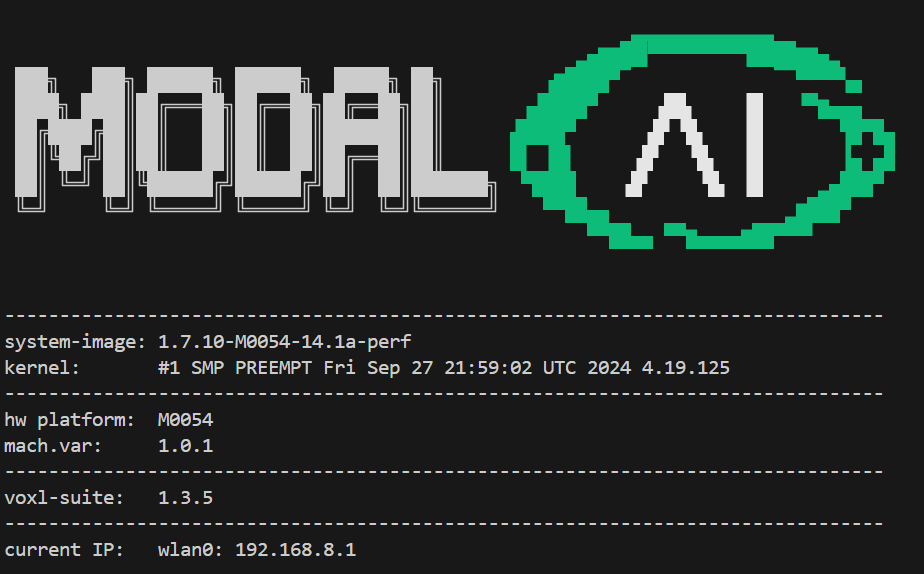
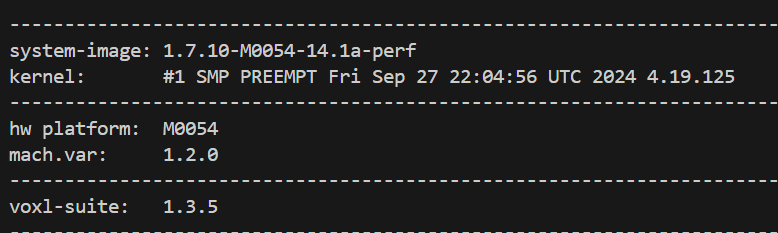
The current VOXL2 SDK is as shown in the image below.
-
RE: voxl2 to jetson uartposted in Ask your questions right here!
Hello, @Alex-Kushleyev
Thank you for your answer.
I am currently trying to use a Jetson device with MAVLink-router through a UART port.
In this case, is it possible to use PX4 with VOXL simultaneously?
My ultimate goal is to use VOXL while Jetson serves only as a router. I want to achieve this by using the UART port.