@Jetson-Nano said in The GPS is not working on auto-start:
Reply
@Jetson-Nano @Eric-Katzfey Thank you for your reply. I have trouble running the mavros_test Project (simple-example) (https://docs.modalai.com/mavros/#mavros_test-project-simple-example).
I followed all the instructions carefully, and when I ran:
cd /home/mavros_test
./run_mavros_test.sh
I got this on the terminal:
voxl2:/home/mavros_test(simple-example)$ ./run_mavros_test.sh
... logging to /home/root/.ros/log/740b46ce-42c4-11ef-b08e-00c0cab5abe5/roslaunch-m0054-5058.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.1.45:39563/
SUMMARY
========
CLEAR PARAMETERS
* /mavros/
PARAMETERS
* /mavros/camera/frame_id: base_link
* /mavros/cmd/use_comp_id_system_control: False
* /mavros/conn/heartbeat_rate: 1.0
* /mavros/conn/system_time_rate: 1.0
* /mavros/conn/timeout: 10.0
* /mavros/conn/timesync_rate: 10.0
* /mavros/distance_sensor/hrlv_ez4_pub/field_of_view: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/frame_id: hrlv_ez4_sonar
* /mavros/distance_sensor/hrlv_ez4_pub/id: 0
* /mavros/distance_sensor/hrlv_ez4_pub/orientation: PITCH_270
* /mavros/distance_sensor/hrlv_ez4_pub/send_tf: True
* /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/x: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/y: 0.0
* /mavros/distance_sensor/hrlv_ez4_pub/sensor_position/z: -0.1
* /mavros/distance_sensor/laser_1_sub/id: 3
* /mavros/distance_sensor/laser_1_sub/orientation: PITCH_270
* /mavros/distance_sensor/laser_1_sub/subscriber: True
* /mavros/distance_sensor/lidarlite_pub/field_of_view: 0.0
* /mavros/distance_sensor/lidarlite_pub/frame_id: lidarlite_laser
* /mavros/distance_sensor/lidarlite_pub/id: 1
* /mavros/distance_sensor/lidarlite_pub/orientation: PITCH_270
* /mavros/distance_sensor/lidarlite_pub/send_tf: True
* /mavros/distance_sensor/lidarlite_pub/sensor_position/x: 0.0
* /mavros/distance_sensor/lidarlite_pub/sensor_position/y: 0.0
* /mavros/distance_sensor/lidarlite_pub/sensor_position/z: -0.1
* /mavros/distance_sensor/sonar_1_sub/horizontal_fov_ratio: 1.0
* /mavros/distance_sensor/sonar_1_sub/id: 2
* /mavros/distance_sensor/sonar_1_sub/orientation: PITCH_270
* /mavros/distance_sensor/sonar_1_sub/subscriber: True
* /mavros/distance_sensor/sonar_1_sub/vertical_fov_ratio: 1.0
* /mavros/fake_gps/eph: 2.0
* /mavros/fake_gps/epv: 2.0
* /mavros/fake_gps/fix_type: 3
* /mavros/fake_gps/geo_origin/alt: 408.0
* /mavros/fake_gps/geo_origin/lat: 47.3667
* /mavros/fake_gps/geo_origin/lon: 8.55
* /mavros/fake_gps/gps_rate: 5.0
* /mavros/fake_gps/mocap_transform: True
* /mavros/fake_gps/satellites_visible: 5
* /mavros/fake_gps/tf/child_frame_id: fix
* /mavros/fake_gps/tf/frame_id: map
* /mavros/fake_gps/tf/listen: False
* /mavros/fake_gps/tf/rate_limit: 10.0
* /mavros/fake_gps/tf/send: False
* /mavros/fake_gps/use_mocap: True
* /mavros/fake_gps/use_vision: False
* /mavros/fcu_protocol: v2.0
* /mavros/fcu_url: udp://127.0.0.1:1...
* /mavros/gcs_url:
* /mavros/global_position/child_frame_id: base_link
* /mavros/global_position/frame_id: map
* /mavros/global_position/gps_uere: 1.0
* /mavros/global_position/rot_covariance: 99999.0
* /mavros/global_position/tf/child_frame_id: base_link
* /mavros/global_position/tf/frame_id: map
* /mavros/global_position/tf/global_frame_id: earth
* /mavros/global_position/tf/send: False
* /mavros/global_position/use_relative_alt: True
* /mavros/image/frame_id: px4flow
* /mavros/imu/angular_velocity_stdev: 0.0003490659 // 0...
* /mavros/imu/frame_id: base_link
* /mavros/imu/linear_acceleration_stdev: 0.0003
* /mavros/imu/magnetic_stdev: 0.0
* /mavros/imu/orientation_stdev: 1.0
* /mavros/landing_target/camera/fov_x: 2.0071286398
* /mavros/landing_target/camera/fov_y: 2.0071286398
* /mavros/landing_target/image/height: 480
* /mavros/landing_target/image/width: 640
* /mavros/landing_target/land_target_type: VISION_FIDUCIAL
* /mavros/landing_target/listen_lt: False
* /mavros/landing_target/mav_frame: LOCAL_NED
* /mavros/landing_target/target_size/x: 0.3
* /mavros/landing_target/target_size/y: 0.3
* /mavros/landing_target/tf/child_frame_id: camera_center
* /mavros/landing_target/tf/frame_id: landing_target
* /mavros/landing_target/tf/listen: False
* /mavros/landing_target/tf/rate_limit: 10.0
* /mavros/landing_target/tf/send: True
* /mavros/local_position/frame_id: map
* /mavros/local_position/tf/child_frame_id: base_link
* /mavros/local_position/tf/frame_id: map
* /mavros/local_position/tf/send: False
* /mavros/local_position/tf/send_fcu: False
* /mavros/mission/pull_after_gcs: True
* /mavros/mission/use_mission_item_int: True
* /mavros/mocap/use_pose: True
* /mavros/mocap/use_tf: False
* /mavros/mount/debounce_s: 4.0
* /mavros/mount/err_threshold_deg: 10.0
* /mavros/mount/negate_measured_pitch: False
* /mavros/mount/negate_measured_roll: False
* /mavros/mount/negate_measured_yaw: False
* /mavros/odometry/fcu/odom_child_id_des: base_link
* /mavros/odometry/fcu/odom_parent_id_des: map
* /mavros/plugin_blacklist: ['safety_area', '...
* /mavros/plugin_whitelist: []
* /mavros/px4flow/frame_id: px4flow
* /mavros/px4flow/ranger_fov: 0.118682
* /mavros/px4flow/ranger_max_range: 5.0
* /mavros/px4flow/ranger_min_range: 0.3
* /mavros/safety_area/p1/x: 1.0
* /mavros/safety_area/p1/y: 1.0
* /mavros/safety_area/p1/z: 1.0
* /mavros/safety_area/p2/x: -1.0
* /mavros/safety_area/p2/y: -1.0
* /mavros/safety_area/p2/z: -1.0
* /mavros/setpoint_accel/send_force: False
* /mavros/setpoint_attitude/reverse_thrust: False
* /mavros/setpoint_attitude/tf/child_frame_id: target_attitude
* /mavros/setpoint_attitude/tf/frame_id: map
* /mavros/setpoint_attitude/tf/listen: False
* /mavros/setpoint_attitude/tf/rate_limit: 50.0
* /mavros/setpoint_attitude/use_quaternion: False
* /mavros/setpoint_position/mav_frame: LOCAL_NED
* /mavros/setpoint_position/tf/child_frame_id: target_position
* /mavros/setpoint_position/tf/frame_id: map
* /mavros/setpoint_position/tf/listen: False
* /mavros/setpoint_position/tf/rate_limit: 50.0
* /mavros/setpoint_raw/thrust_scaling: 1.0
* /mavros/setpoint_velocity/mav_frame: LOCAL_NED
* /mavros/startup_px4_usb_quirk: False
* /mavros/sys/disable_diag: False
* /mavros/sys/min_voltage: 10.0
* /mavros/target_component_id: 1
* /mavros/target_system_id: 1
* /mavros/tdr_radio/low_rssi: 40
* /mavros/time/time_ref_source: fcu
* /mavros/time/timesync_avg_alpha: 0.6
* /mavros/time/timesync_mode: MAVLINK
* /mavros/vibration/frame_id: base_link
* /mavros/vision_pose/tf/child_frame_id: vision_estimate
* /mavros/vision_pose/tf/frame_id: odom
* /mavros/vision_pose/tf/listen: False
* /mavros/vision_pose/tf/rate_limit: 10.0
* /mavros/vision_speed/listen_twist: True
* /mavros/vision_speed/twist_cov: True
* /mavros/wheel_odometry/child_frame_id: base_link
* /mavros/wheel_odometry/count: 2
* /mavros/wheel_odometry/frame_id: odom
* /mavros/wheel_odometry/send_raw: True
* /mavros/wheel_odometry/send_twist: False
* /mavros/wheel_odometry/tf/child_frame_id: base_link
* /mavros/wheel_odometry/tf/frame_id: odom
* /mavros/wheel_odometry/tf/send: False
* /mavros/wheel_odometry/use_rpm: False
* /mavros/wheel_odometry/vel_error: 0.1
* /mavros/wheel_odometry/wheel0/radius: 0.05
* /mavros/wheel_odometry/wheel0/x: 0.0
* /mavros/wheel_odometry/wheel0/y: -0.15
* /mavros/wheel_odometry/wheel1/radius: 0.05
* /mavros/wheel_odometry/wheel1/x: 0.0
* /mavros/wheel_odometry/wheel1/y: 0.15
* /rosdistro: melodic
* /rosversion: 1.14.13
NODES
/
mavros (mavros/mavros_node)
mavros_test_node (mavros_test/mavros_test_node)
auto-starting new master
process[master]: started with pid [5072]
ROS_MASTER_URI=http://127.0.0.1:11311/
setting /run_id to 740b46ce-42c4-11ef-b08e-00c0cab5abe5
process[rosout-1]: started with pid [5083]
started core service [/rosout]
process[mavros-2]: started with pid [5091]
process[mavros_test_node-3]: started with pid [5092]
[ INFO] [1721059701.053944604]: simple_demo
[ INFO] [1721059701.184390643]: FCU URL: udp://127.0.0.1:14551@:14551
[ INFO] [1721059701.186887064]: udp0: Bind address: 127.0.0.1:14551
[ INFO] [1721059701.186984362]: GCS bridge disabled
[ INFO] [1721059701.198153822]: Plugin 3dr_radio loaded
[ INFO] [1721059701.206209164]: Plugin 3dr_radio initialized
[ INFO] [1721059701.206311202]: Plugin actuator_control loaded
[ INFO] [1721059701.209795450]: Plugin actuator_control initialized
[ INFO] [1721059701.215531831]: Plugin adsb loaded
[ INFO] [1721059701.220162824]: Plugin adsb initialized
[ INFO] [1721059701.220375235]: Plugin altitude loaded
[ INFO] [1721059701.223591756]: Plugin altitude initialized
[ INFO] [1721059701.224009285]: Plugin cam_imu_sync loaded
[ INFO] [1721059701.224724230]: Plugin cam_imu_sync initialized
[ INFO] [1721059701.224842050]: Plugin camera loaded
[ INFO] [1721059701.225575017]: Plugin camera initialized
[ INFO] [1721059701.225867745]: Plugin cellular_status loaded
[ INFO] [1721059701.228871335]: Plugin cellular_status initialized
[ INFO] [1721059701.229033274]: Plugin command loaded
[ INFO] [1721059701.234510887]: Plugin command initialized
[ INFO] [1721059701.234635114]: Plugin companion_process_status loaded
[ INFO] [1721059701.236884851]: Plugin companion_process_status initialized
[ INFO] [1721059701.237013975]: Plugin debug_value loaded
[ INFO] [1721059701.240331753]: Plugin debug_value initialized
[ INFO] [1721059701.240368943]: Plugin distance_sensor blacklisted
[ INFO] [1721059701.240454939]: Plugin esc_status loaded
[ INFO] [1721059701.241189572]: Plugin esc_status initialized
[ INFO] [1721059701.241286818]: Plugin esc_telemetry loaded
[ INFO] [1721059701.242087394]: Plugin esc_telemetry initialized
[ INFO] [1721059701.242218392]: Plugin fake_gps loaded
[ INFO] [1721059701.255931099]: Plugin fake_gps initialized
[ INFO] [1721059701.256196169]: Plugin ftp loaded
[ INFO] [1721059701.262559781]: Plugin ftp initialized
[ INFO] [1721059701.262688435]: Plugin geofence loaded
[ INFO] [1721059701.264421262]: Plugin geofence initialized
[ INFO] [1721059701.264509289]: Plugin global_position loaded
[ INFO] [1721059701.274271205]: Plugin global_position initialized
[ INFO] [1721059701.274368920]: Plugin gps_input loaded
[ INFO] [1721059701.276500941]: Plugin gps_input initialized
[ INFO] [1721059701.276609125]: Plugin gps_rtk loaded
[ INFO] [1721059701.278799535]: Plugin gps_rtk initialized
[ INFO] [1721059701.278885739]: Plugin gps_status loaded
[ INFO] [1721059701.280354224]: Plugin gps_status initialized
[ INFO] [1721059701.280445950]: Plugin guided_target loaded
[ INFO] [1721059701.282821528]: Plugin guided_target initialized
[ INFO] [1721059701.282942057]: Plugin hil loaded
[ INFO] [1721059701.291681143]: Plugin hil initialized
[ INFO] [1721059701.291835894]: Plugin home_position loaded
[ INFO] [1721059701.294077349]: Plugin home_position initialized
[ INFO] [1721059701.294178085]: Plugin imu loaded
[ INFO] [1721059701.300978601]: Plugin imu initialized
[ INFO] [1721059701.301082046]: Plugin landing_target loaded
[ INFO] [1721059701.319874526]: Plugin landing_target initialized
[ INFO] [1721059701.320027037]: Plugin local_position loaded
[ INFO] [1721059701.324364728]: Plugin local_position initialized
[ INFO] [1721059701.324495102]: Plugin log_transfer loaded
[ INFO] [1721059701.329005201]: Plugin log_transfer initialized
[ INFO] [1721059701.329123543]: Plugin mag_calibration_status loaded
[ INFO] [1721059701.329793693]: Plugin mag_calibration_status initialized
[ INFO] [1721059701.329883803]: Plugin manual_control loaded
[ INFO] [1721059701.331578919]: Plugin manual_control initialized
[ INFO] [1721059701.331655799]: Plugin mocap_pose_estimate loaded
[ INFO] [1721059701.333844907]: Plugin mocap_pose_estimate initialized
[ INFO] [1721059701.333922933]: Plugin mount_control loaded
[ WARN] [1721059701.336751772]: Could not retrive negate_measured_roll parameter value, using default (0)
[ WARN] [1721059701.336996216]: Could not retrive negate_measured_pitch parameter value, using default (0)
[ WARN] [1721059701.337240659]: Could not retrive negate_measured_yaw parameter value, using default (0)
[ WARN] [1721059701.338031234]: Could not retrive debounce_s parameter value, using default (4.000000)
[ WARN] [1721059701.338254374]: Could not retrive err_threshold_deg parameter value, using default (10.000000)
[ INFO] [1721059701.338292658]: Plugin mount_control initialized
[ INFO] [1721059701.338385269]: Plugin nav_controller_output loaded
[ INFO] [1721059701.338699821]: Plugin nav_controller_output initialized
[ INFO] [1721059701.338771649]: Plugin obstacle_distance loaded
[ INFO] [1721059701.340162109]: Plugin obstacle_distance initialized
[ INFO] [1721059701.340228520]: Plugin odom loaded
[ INFO] [1721059701.342990427]: Plugin odom initialized
[ INFO] [1721059701.343101841]: Plugin onboard_computer_status loaded
[ INFO] [1721059701.344622934]: Plugin onboard_computer_status initialized
[ INFO] [1721059701.344730337]: Plugin param loaded
[ INFO] [1721059701.347169931]: Plugin param initialized
[ INFO] [1721059701.347327546]: Plugin play_tune loaded
[ INFO] [1721059701.349693801]: Plugin play_tune initialized
[ INFO] [1721059701.349777765]: Plugin px4flow loaded
[ INFO] [1721059701.354768887]: Plugin px4flow initialized
[ INFO] [1721059701.355008018]: Plugin rallypoint loaded
[ INFO] [1721059701.357594340]: Plugin rallypoint initialized
[ INFO] [1721059701.357646896]: Plugin rangefinder blacklisted
[ INFO] [1721059701.357734819]: Plugin rc_io loaded
[ INFO] [1721059701.360371405]: Plugin rc_io initialized
[ INFO] [1721059701.360420887]: Plugin safety_area blacklisted
[ INFO] [1721059701.360521363]: Plugin setpoint_accel loaded
[ INFO] [1721059701.362749275]: Plugin setpoint_accel initialized
[ INFO] [1721059701.362888295]: Plugin setpoint_attitude loaded
[ INFO] [1721059701.369753920]: Plugin setpoint_attitude initialized
[ INFO] [1721059701.369872991]: Plugin setpoint_position loaded
[ INFO] [1721059701.379478126]: Plugin setpoint_position initialized
[ INFO] [1721059701.379646210]: Plugin setpoint_raw loaded
[ INFO] [1721059701.385296127]: Plugin setpoint_raw initialized
[ INFO] [1721059701.385406291]: Plugin setpoint_trajectory loaded
[ INFO] [1721059701.390939481]: Plugin setpoint_trajectory initialized
[ INFO] [1721059701.391086262]: Plugin setpoint_velocity loaded
[ INFO] [1721059701.394824486]: Plugin setpoint_velocity initialized
[ INFO] [1721059701.394964912]: Plugin sys_status loaded
[ INFO] [1721059701.408650950]: Plugin sys_status initialized
[ INFO] [1721059701.408896332]: Plugin sys_time loaded
[ INFO] [1721059701.414709801]: TM: Timesync mode: MAVLINK
[ INFO] [1721059701.415076233]: TM: Not publishing sim time
[ INFO] [1721059701.416871928]: Plugin sys_time initialized
[ INFO] [1721059701.416999020]: Plugin terrain loaded
[ INFO] [1721059701.419657066]: Plugin terrain initialized
[ INFO] [1721059701.419786294]: Plugin trajectory loaded
[ INFO] [1721059701.426208555]: Plugin trajectory initialized
[ INFO] [1721059701.426340699]: Plugin tunnel loaded
[ INFO] [1721059701.428138166]: Plugin tunnel initialized
[ INFO] [1721059701.428232912]: Plugin vfr_hud loaded
[ INFO] [1721059701.428621063]: Plugin vfr_hud initialized
[ INFO] [1721059701.428662681]: Plugin vibration blacklisted
[ INFO] [1721059701.428737113]: Plugin vision_pose_estimate loaded
[ INFO] [1721059701.435602217]: Plugin vision_pose_estimate initialized
[ INFO] [1721059701.435714933]: Plugin vision_speed_estimate loaded
[ INFO] [1721059701.437805857]: Plugin vision_speed_estimate initialized
[ INFO] [1721059701.437895342]: Plugin waypoint loaded
[ INFO] [1721059701.440488800]: Plugin waypoint initialized
[ INFO] [1721059701.440527449]: Plugin wheel_odometry blacklisted
[ INFO] [1721059701.440773507]: Plugin wind_estimation loaded
[ INFO] [1721059701.442031249]: Plugin wind_estimation initialized
[ INFO] [1721059701.442183187]: Built-in SIMD instructions: ARM NEON
[ INFO] [1721059701.442203397]: Built-in MAVLink package version: 2022.12.30
[ INFO] [1721059701.442223242]: Known MAVLink dialects: common ardupilotmega ASLUAV AVSSUAS all cubepilot development icarous matrixpilot paparazzi standard storm32 uAvionix ualberta
[ INFO] [1721059701.442239128]: MAVROS started. MY ID 1.240, TARGET ID 1.1
[ INFO] [1721059706.087746519]: waiting for offboard mode
. The problem is here: When I switch between manual and offboard, the drone does not arm/disarm as expected in the video tutorial and instructions!
Note 1: Here is my IP address, and detail of the config files:
amirmahdi@amirmahdi:~$ ifconfig
docker0: flags=4099<UP,BROADCAST,MULTICAST> mtu 1500
inet 172.17.0.1 netmask 255.255.0.0 broadcast 172.17.255.255
ether 02:42:72:03:47:05 txqueuelen 0 (Ethernet)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
enp45s0: flags=4099<UP,BROADCAST,MULTICAST> mtu 1500
ether b4:45:06:94:a8:b6 txqueuelen 1000 (Ethernet)
RX packets 0 bytes 0 (0.0 B)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 0 bytes 0 (0.0 B)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
lo: flags=73<UP,LOOPBACK,RUNNING> mtu 65536
inet 127.0.0.1 netmask 255.0.0.0
inet6 ::1 prefixlen 128 scopeid 0x10<host>
loop txqueuelen 1000 (Local Loopback)
RX packets 14480 bytes 1380176 (1.3 MB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 14480 bytes 1380176 (1.3 MB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
wlp0s20f3: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 192.168.1.5 netmask 255.255.255.0 broadcast 192.168.1.255
inet6 fe80::e9cf:ce9f:8897:56e4 prefixlen 64 scopeid 0x20<link>
ether cc:15:31:2b:bc:95 txqueuelen 1000 (Ethernet)
RX packets 4029202 bytes 3659491459 (3.6 GB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 318206 bytes 62215059 (62.2 MB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
amirmahdi@amirmahdi:~$ ssh -X root@192.168.1.45
root@192.168.1.45's password:
Welcome to Ubuntu 18.04.6 LTS (GNU/Linux 4.19.125 aarch64)
* Documentation: https://help.ubuntu.com
* Management: https://landscape.canonical.com
* Support: https://ubuntu.com/pro
This system has been minimized by removing packages and content that are
not required on a system that users do not log into.
To restore this content, you can run the 'unminimize' command.
Last login: Mon Jul 15 15:58:42 2024 from 192.168.1.5
▂▂▂▂▂▂▂▂▂▂▂▂▂
▂▄▆▆██▛▀▀▀▀▀▀▀▀▜████▆▆▄▂
███╗ ███╗ ██████╗ ██████╗ █████╗ ██╗ ▗▆████▀▔ ▔▔▀▀▀▀▚▄
████╗ ████║██╔═══██╗██╔══██╗██╔══██╗██║ ▗▟████▀ ▗██▖ ▐█ ▝▀▆▄▄▄
██╔████╔██║██║ ██║██║ ██║███████║██║ ▟████▀ ▗█▘▝█▖ ▐█ ▜█▀█▄
██║╚██╔╝██║██║ ██║██║ ██║██╔══██║██║ █▌ ▐█▌ ▗█▘ ▝█▖ ▐█ ▐▄ ▄█
██║ ╚═╝ ██║╚██████╔╝██████╔╝██║ ██║███████╗ ▀████ ▗█▘ ▝█▖ ▐█ ▂▄███▀
╚═╝ ╚═╝ ╚═════╝ ╚═════╝ ╚═╝ ╚═╝╚══════╝ ▀▀██▄▄ ▂▆███▀
▀▀██▄▄ ▀▀▆▄▄▄▄▆██▀▀▀▘
--------------------------------------------------------------------------------
system-image: 1.7.8-M0054-14.1a-perf
kernel: #1 SMP PREEMPT Fri May 17 23:29:23 UTC 2024 4.19.125
--------------------------------------------------------------------------------
hw platform: M0054
mach.var: 1.0.0
--------------------------------------------------------------------------------
voxl-suite: 1.3.1~beta1
--------------------------------------------------------------------------------
current IP: wlan0: 192.168.1.45
--------------------------------------------------------------------------------
voxl2:~$ more /home/mavros_test/ros_environment.sh
#!/bin/bash
#
# load main ros environment
if [ -f /opt/ros/melodic/setup.bash ]; then
source /opt/ros/melodic/setup.bash
elif [ -f /opt/ros/kinetic/setup.bash ]; then
source /opt/ros/kinetic/setup.bash
elif [ -f /opt/ros/indigo/setup.bash ]; then
source /opt/ros/indigo/setup.bash
fi
source catkin_ws/install/setup.bash
unset ROS_HOSTNAME
# configure ROS IPs here
export ROS_MASTER_IP=127.0.0.1
export ROS_IP=192.168.1.45
export ROS_MASTER_URI=http://${ROS_MASTER_IP}:11311/
# mavros needs to know what PX4's system id is
export PX4_SYS_ID=1
And here is the voxl-vision-hub.conf:
voxl2:~$ more /etc/modalai/voxl-vision-hub.conf
.
.
.
{
"config_file_version": 1,
"qgc_ip": "192.168.1.5",
"en_localhost_mavlink_udp": true,
"localhost_udp_port_number": 14551,
"en_vio": true,
"vio_pipe": "qvio",
"secondary_vio_pipe": "ov",
"en_reset_vio_if_initialized_inverted": true,
"vio_warmup_s": 3,
"send_odom_while_failed": true,
"horizon_cal_tolerance": 0.5,
"offboard_mode": "off",
"follow_tag_id": 0,
"figure_eight_move_home": true,
"robot_radius": 0.300000011920929,
"collision_sampling_dt": 0.1,
"max_lookahead_distance": 1,
"backtrack_seconds": 5,
"wps_move_home": true,
"wps_stride": 0,
"wps_timeout": 0,
"wps_damp": 1,
"en_tag_fixed_frame": false,
"fixed_frame_filter_len": 5,
"en_transform_mavlink_pos_setpoints_from_fixed_frame": false,
"en_voa": true,
"voa_upper_bound_m": -0.15000000596046448,
"voa_lower_bound_m": 0.15000000596046448,
"voa_voa_memory_s": 1,
"voa_max_pc_per_fusion": 100,
"voa_pie_max_dist_m": 20,
"voa_pie_min_dist_m": 0.25,
"voa_pie_under_trim_m": 1,
"voa_pie_threshold": 3,
"voa_send_rate_hz": 20,
"voa_pie_slices": 36,
"voa_pie_bin_depth_m": 0.15000000596046448,
"voa_inputs": [{
"enabled": true,
"type": "point_cloud",
"input_pipe": "dfs_point_cloud",
"frame": "stereo_l",
"max_depth": 8,
"min_depth": 0.300000011920929,
"cell_size": 0.079999998211860657,
"threshold": 4,
"x_fov_deg": 68,
"y_fov_deg": 56,
"conf_cutoff": 0
}, {
"enabled": true,
"type": "point_cloud",
"input_pipe": "stereo_front_pc",
"frame": "stereo_front_l",
"max_depth": 8,
"min_depth": 0.300000011920929,
"cell_size": 0.079999998211860657,
"threshold": 4,
"x_fov_deg": 68,
"y_fov_deg": 56,
"conf_cutoff": 0
}, {
"enabled": true,
"type": "point_cloud",
"input_pipe": "stereo_rear_pc",
"frame": "stereo_rear_l",
"max_depth": 8,
"min_depth": 0.300000011920929,
"cell_size": 0.079999998211860657,
"threshold": 4,
"x_fov_deg": 68,
"y_fov_deg": 56,
"conf_cutoff": 0
}, {
"enabled": true,
"type": "tof",
"input_pipe": "tof",
"frame": "tof",
"max_depth": 6,
"min_depth": 0.15000000596046448,
"cell_size": 0.079999998211860657,
"threshold": 3,
"x_fov_deg": 106.5,
"y_fov_deg": 85.0999984741211,
"conf_cutoff": 125
}, {
"enabled": true,
"type": "rangefinder",
"input_pipe": "rangefinders",
"frame": "body",
"max_depth": 8,
"min_depth": 0.300000011920929,
"cell_size": 0.079999998211860657,
"threshold": 4,
"x_fov_deg": 68,
"y_fov_deg": 56,
"conf_cutoff": 0
}]
}
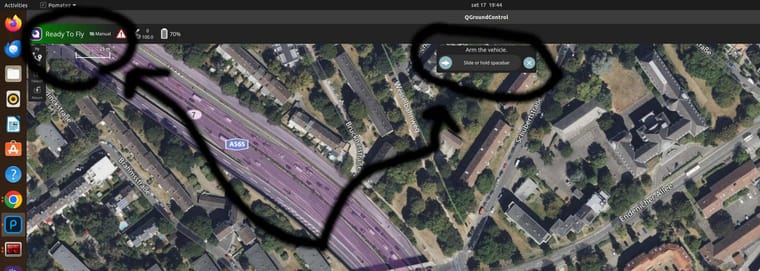
Note 2: I could manually arm/disarm the Sentinel drone with QGC and RC. The motors are working properly. But this ros example is not working here! Can anyone help me?
Note 3: I also tryied to change the mode channel to 5 and 6, but still not working!