Hello Team,
I want to buy Qualcomm Flight RB5 5G Drone. But have couple of questions?
-
Does this platform support imx214 and imx412 camera?
-
Does this support TOF sensor by modalai?
Thanks and Regards,
Anubhav
Hello Team,
I want to buy Qualcomm Flight RB5 5G Drone. But have couple of questions?
Does this platform support imx214 and imx412 camera?
Does this support TOF sensor by modalai?
Thanks and Regards,
Anubhav
Hello Team,
@Chad-Sweet @modaltb
We are trying to connect a Ydlidar Tmini pro which has 3.3 V signal level UART interface. We are trying to connect it to J19 UART port in the voxl2 and would like to know which UART pins (GNSS or RC) to use for our requirement. Moreover, what will be the port mapping. For ex: whether it will be ttyHS0-3 or some other port.
Thanks
Anubhav
@Moderator
I have followed the link given by you, but it is very hard to understand the document you have mentioned. Under topic 1.6.2 SUPPORTED SENSOR HARDWARE IDS
I have tried c-16 configuration by following the configuration setup given in the image in the document. My setup is shown below in the table and image attached:
Output from the camera-server is as follows: Tof, hires, and tracking didn't gave any problem but the camera server crashed due to tracking2.
voxl2:/$ voxl-camera-server
existing instance of voxl-camera-server found, attempting to stop it
=================================================================
configuration for 4 cameras:
cam #0
name: tof
sensor type: pmd-tof
isEnabled: 1
camId: 0
camId2: -1
fps: 5
en_preview: 1
pre_width: 224
pre_height: 1557
pre_format: tof
en_small_video: 0
small_video_width: -1
small_video_height: -1
en_large_video: 0
large_video_width: -1
large_video_height: -1
en_snapshot: 0
snap_width: -1
snap_height: -1
ae_mode: off
standby_enabled: 0
decimator: 5
independent_exposure:0
cam #1
name: hires
sensor type: imx214
isEnabled: 1
camId: 1
camId2: -1
fps: 30
en_preview: 0
pre_width: 640
pre_height: 480
pre_format: nv21
en_small_video: 1
small_video_width: 1024
small_video_height: 768
en_large_video: 1
large_video_width: 4096
large_video_height: 2160
en_snapshot: 1
snap_width: 4160
snap_height: 3120
ae_mode: isp
standby_enabled: 0
decimator: 1
independent_exposure:0
cam #2
name: tracking
sensor type: ov7251
isEnabled: 1
camId: 2
camId2: -1
fps: 30
en_preview: 1
pre_width: 640
pre_height: 480
pre_format: raw8
en_small_video: 0
small_video_width: -1
small_video_height: -1
en_large_video: 0
large_video_width: -1
large_video_height: -1
en_snapshot: 0
snap_width: -1
snap_height: -1
ae_mode: lme_msv
standby_enabled: 0
decimator: 1
independent_exposure:0
cam #3
name: tracking2
sensor type: ov7251
isEnabled: 1
camId: 3
camId2: -1
fps: 30
en_preview: 1
pre_width: 640
pre_height: 480
pre_format: raw8
en_small_video: 0
small_video_width: -1
small_video_height: -1
en_large_video: 0
large_video_width: -1
large_video_height: -1
en_snapshot: 0
snap_width: -1
snap_height: -1
ae_mode: lme_msv
standby_enabled: 0
decimator: 1
independent_exposure:0
=================================================================
Starting Camera: tof
Starting Camera: hires
WARNING: Port Def 0:
Count Min: 8
Count Actual: 16
Size: 0x180000
Buffers Contiguous: Yes
Buffer Alignment: 0
WARNING: Port Def 1:
Count Min: 4
Count Actual: 16
Size: 0x5a0000
Buffers Contiguous: No
Buffer Alignment: 0
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
WARNING: Port Def 0:
Count Min: 8
Count Actual: 16
Size: 0xf00000
Buffers Contiguous: Yes
Buffer Alignment: 0
WARNING: Port Def 1:
Count Min: 4
Count Actual: 16
Size: 0x7f8000
Buffers Contiguous: No
Buffer Alignment: 0
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
Starting Camera: tracking
Starting Camera: tracking2
Segmentation fault:
Fault thread: voxl-camera-ser(tid: 2411)
Segmentation fault
Hello Team,
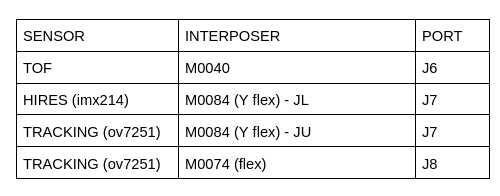
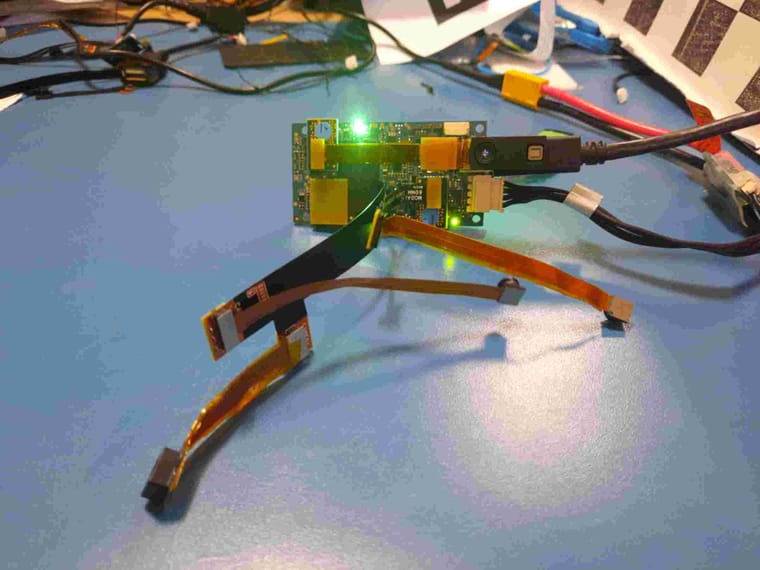
I am trying to configure dual tracking camera, hires and TOF in vox2 ( new SDK 1.0 ).
I have connected both ov7251 tracking cameras on J7 port with the help of M-0084 y-connector. Hires Imx214 in J8 and tof on j6 port. (image is also inserted to show the hardware setup)
Below is the output while running the camera server. Can you tell me where I am going wrong and how can I resolve the problem.
voxl-camera-server -d 0
=================================================================
configuration for 4 cameras:
cam #0
name: tof
sensor type: pmd-tof
isEnabled: 1
camId: 0
camId2: -1
fps: 5
en_preview: 1
pre_width: 224
pre_height: 1557
pre_format: tof
en_small_video: 0
small_video_width: -1
small_video_height: -1
en_large_video: 0
large_video_width: -1
large_video_height: -1
en_snapshot: 0
snap_width: -1
snap_height: -1
ae_mode: off
standby_enabled: 0
decimator: 5
independent_exposure:0
cam #1
name: tracking
sensor type: ov7251
isEnabled: 1
camId: 2
camId2: -1
fps: 30
en_preview: 1
pre_width: 640
pre_height: 480
pre_format: raw8
en_small_video: 0
small_video_width: -1
small_video_height: -1
en_large_video: 0
large_video_width: -1
large_video_height: -1
en_snapshot: 0
snap_width: -1
snap_height: -1
ae_mode: lme_msv
standby_enabled: 0
decimator: 1
independent_exposure:0
cam #2
name: tracking2
sensor type: ov7251
isEnabled: 1
camId: 3
camId2: -1
fps: 30
en_preview: 1
pre_width: 640
pre_height: 480
pre_format: raw8
en_small_video: 0
small_video_width: -1
small_video_height: -1
en_large_video: 0
large_video_width: -1
large_video_height: -1
en_snapshot: 0
snap_width: -1
snap_height: -1
ae_mode: lme_msv
standby_enabled: 0
decimator: 1
independent_exposure:0
cam #3
name: hires
sensor type: imx214
isEnabled: 1
camId: 4
camId2: -1
fps: 30
en_preview: 0
pre_width: 640
pre_height: 480
pre_format: nv21
en_small_video: 1
small_video_width: 1024
small_video_height: 768
en_large_video: 1
large_video_width: 4096
large_video_height: 2160
en_snapshot: 1
snap_width: 4160
snap_height: 3120
ae_mode: isp
standby_enabled: 0
decimator: 1
independent_exposure:0
=================================================================
DEBUG: ------ voxl-camera-server: Starting 4 cameras
Starting Camera: tof
DEBUG: Attempting to open the hal module
DEBUG: SUCCESS: Camera module opened on attempt 0
DEBUG: ----------- Number of cameras: 1
DEBUG: Cam idx: 0, Cam slot: 0, Slave Address: 0x007A, Sensor Id: 0x003D
VERBOSE: Successfully found configuration match for camera 0: 224x1557
VERBOSE: Adding preview stream for camera: 0
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: ALIGNING HEIGHT FOR LARGE IMAGE
DEBUG: Allocating img Buffer: width: 224 stride: 224 height: 1557 slice: 2048 size: 688128
DEBUG: Successfully set up pipeline for stream: PREVIEW
DEBUG: Started Camera: tof
Starting Camera: tracking
VERBOSE: Entered thread: cam0-request(tid: 2469)
VERBOSE: Entered thread: cam0-result(tid: 2470)
Segmentation fault:
Fault thread: voxl-camera-ser(tid: 2448)
Fault address: 0x564fc726cc
Address not mapped.
VERBOSE: Found Royale module config: imagerType 2, illuminationConfig.dutyCycle: 4 temp_sensor_type: 5
VERBOSE: Found Royale module config: maxImgW 224 maxImgH 172 frameTxMode 1 camName X1.1_850nm_2W
VERBOSE: Found Royale module config: tempLimitSoft 60.000000 tempLimitHard 65.000000 autoExpoSupported yes
VERBOSE: Found Royale usecase: MODE_9_5FPS - phases: 9 fps: 5
VERBOSE: Found Royale usecase: MODE_9_5FPS - exposure group[0] = gray
VERBOSE: Found Royale usecase: MODE_9_5FPS - exposure group[1] = mod1
Thanks!
Anubhav
Hi Team,
@modaltb
I have been trying to calibrate the esc connected to my flight core v2. the esc pwm cable is connected to J7 port of FC. as given in docs for FC v2 "Standard PX4 drivers used" I assumed calibration should happen through QGC. Also I have tried the ESC calibration method mentioned here. but I was unable to do the calibration through both attempts.
The below output of calibration performed as given in the FC v1 ESC calibration.
Using portname /dev/serial/by-id/usb-ModalAI_PX4_FMU_ModalAI_FCv2_0-if00
connecting...
Error: Unable to open port
Help from your side will be highly valuable.
Thanks!
Anubhav
Thanks @tom, yeah I missed that flag. The board is flashed completely now.
Hi @tom, Thanks for quick response.
you can see the output below for above procedure. it's not flashing the image completely.
# anubhav @ anubhav-GF63-Thin-9SC in ~/Downloads/voxl2_platform_0.9.5/system-image [22:43:22]
$ ./flash-system-image.sh
Detected OS: Linux
Installer Version: 0.8
Image Version: 1.5.5
[INFO] Found fastboot device
[WARNING] This system image flash is intended only for the following
platform: VOXL2 (m0054)
Make sure that the device that will be flashed is correct.
Flashing a device with an incorrect system image will lead
the device to be stuck in fastboot.
Would you like to continue with the VOXL2 (m0054) system image flash?
1) Yes
2) No
#? 1
[INFO] Found correct partitions
[INFO] Found all required files
Done Flashing
[----------------------------------------------------------------](100%)
rebooting...
finished. total time: 0.050s
[INFO] Waiting for ADB
[INFO] Device ready, version:
1.5.5-M0054-14.1a-perf
[INFO] Finished flashing system image!
# anubhav @ anubhav-GF63-Thin-9SC in ~/Downloads/voxl2_platform_0.9.5/system-image [22:45:50]
$ cd ..
# anubhav @ anubhav-GF63-Thin-9SC in ~/Downloads/voxl2_platform_0.9.5 [22:46:00]
$ cd voxl-suite
# anubhav @ anubhav-GF63-Thin-9SC in ~/Downloads/voxl2_platform_0.9.5/voxl-suite [22:46:07]
$ ./offline-install.sh
[INFO] adb installed
[INFO] Waiting for device
[INFO] Pushing packages to target
[ ]( 0%)
libmodal-cv_0.2.3_arm64.deb: 1 file pushed. 3.7 MB/s (460480 bytes in 0.118s)
[- ]( 2%)
libmodal-exposure_0.0.7_arm64.deb: 1 f...shed. 4.1 MB/s (11548 bytes in 0.003s)
[-- ]( 4%)
libmodal-journal_0.2.1_arm64.deb: 1 fi...ushed. 2.7 MB/s (9416 bytes in 0.003s)
[--- ]( 6%)
libmodal-json_0.4.3_arm64.deb: 1 file ...shed. 4.2 MB/s (44112 bytes in 0.010s)
[----- ]( 8%)
libmodal-pipe_2.8.2_arm64.deb: 1 file ...shed. 2.5 MB/s (83540 bytes in 0.031s)
[------ ]( 10%)
libqrb5165-io_0.1.0_arm64.deb: 1 file ...shed. 2.3 MB/s (10620 bytes in 0.004s)
[------- ]( 12%)
librc-math_1.3.0_arm64.deb: 1 file pushed. 2.7 MB/s (102816 bytes in 0.037s)
[-------- ]( 14%)
libvoxl-cci-direct_0.1.5_arm64.deb: 1 ...ushed. 1.4 MB/s (6624 bytes in 0.004s)
[---------- ]( 16%)
libvoxl-cutils_0.1.1_arm64.deb: 1 file...ushed. 1.2 MB/s (6228 bytes in 0.005s)
[----------- ]( 18%)
mavlink-camera-manager_0.1.0_arm64.deb...shed. 1.4 MB/s (27072 bytes in 0.019s)
[------------ ]( 20%)
qrb5165-dfs-server_0.1.0_arm64.deb: 1 ...shed. 1.7 MB/s (14400 bytes in 0.008s)
[-------------- ]( 22%)
qrb5165-imu-server_0.5.0_arm64.deb: 1 ...shed. 2.3 MB/s (60264 bytes in 0.025s)
[--------------- ]( 24%)
qrb5165-system-tweaks_0.1.5_arm64.deb:...ushed. 1.2 MB/s (6656 bytes in 0.005s)
[---------------- ]( 26%)
qrb5165-tflite_2.8.0-2_arm64.deb: 1 fi...d. 6.2 MB/s (11028016 bytes in 1.709s)
[----------------- ]( 28%)
voxl-bind_0.0.1_arm64.deb: 1 file pushed. 2.9 MB/s (4908 bytes in 0.002s)
[------------------- ]( 30%)
voxl-camera-calibration_0.2.3_arm64.de...shed. 4.3 MB/s (61816 bytes in 0.014s)
[-------------------- ]( 32%)
voxl-camera-server_1.3.5_arm64.deb: 1 ...hed. 4.7 MB/s (577380 bytes in 0.117s)
[--------------------- ]( 34%)
voxl-ceres-solver_1.14.0-9_arm64.deb: ...hed. 6.3 MB/s (835012 bytes in 0.126s)
[----------------------- ]( 36%)
voxl-cpu-monitor_0.3.0_arm64.deb: 1 fi...shed. 5.0 MB/s (25116 bytes in 0.005s)
[------------------------ ]( 38%)
voxl-docker-support_1.2.4_arm64.deb: 1...ushed. 4.5 MB/s (7908 bytes in 0.002s)
[------------------------- ]( 40%)
voxl-eigen3_3.4.0_arm64.deb: 1 file pu...ed. 5.6 MB/s (1013744 bytes in 0.172s)
[-------------------------- ]( 42%)
voxl-flir-server_0.2.0_arm64.deb: 1 fi...ushed. 2.9 MB/s (8136 bytes in 0.003s)
[---------------------------- ]( 44%)
voxl-gphoto2-server_0.0.10_arm64.deb: ...shed. 3.3 MB/s (31632 bytes in 0.009s)
[----------------------------- ]( 46%)
voxl-jpeg-turbo_2.1.3-4_arm64.deb: 1 f...ed. 4.1 MB/s (1150788 bytes in 0.270s)
[------------------------------ ]( 48%)
voxl-libgphoto2_0.0.4_arm64.deb: 1 fil...ed. 5.9 MB/s (1576804 bytes in 0.254s)
[-------------------------------- ]( 50%)
voxl-libuvc_1.0.7_arm64.deb: 1 file pushed. 5.0 MB/s (47412 bytes in 0.009s)
[--------------------------------- ]( 52%)
voxl-logger_0.3.4_arm64.deb: 1 file pushed. 3.1 MB/s (37968 bytes in 0.012s)
[---------------------------------- ]( 54%)
voxl-mapper_0.1.5_arm64.deb: 1 file pushed. 3.2 MB/s (489984 bytes in 0.144s)
[----------------------------------- ]( 56%)
voxl-mavlink_0.1.0_arm64.deb: 1 file p...hed. 4.6 MB/s (524696 bytes in 0.108s)
[------------------------------------- ]( 58%)
voxl-mavlink-server_0.3.0_arm64.deb: 1...shed. 4.0 MB/s (17020 bytes in 0.004s)
[-------------------------------------- ]( 60%)
voxl-modem_0.16.1_arm64.deb: 1 file pushed. 2.8 MB/s (55996 bytes in 0.019s)
[--------------------------------------- ]( 62%)
voxl-mongoose_7.7.0-1_arm64.deb: 1 fil...shed. 2.7 MB/s (72336 bytes in 0.026s)
[---------------------------------------- ]( 64%)
voxl-mpa-tools_0.7.5_arm64.deb: 1 file...shed. 3.6 MB/s (55632 bytes in 0.015s)
[------------------------------------------ ]( 66%)
voxl-mpa-tools_0.7.6_arm64.deb: 1 file...shed. 2.8 MB/s (55576 bytes in 0.019s)
[------------------------------------------- ]( 68%)
voxl-mpa-to-ros_0.3.6_arm64.deb: 1 fil...hed. 4.7 MB/s (600464 bytes in 0.122s)
[-------------------------------------------- ]( 70%)
voxl-nlopt_2.5.0-4_arm64.deb: 1 file p...hed. 4.1 MB/s (331988 bytes in 0.077s)
[---------------------------------------------- ]( 72%)
voxl-opencv_4.5.5-1_arm64.deb: 1 file ...d. 6.1 MB/s (13574024 bytes in 2.113s)
[----------------------------------------------- ]( 74%)
voxl-portal_0.5.0_arm64.deb: 1 file pu...ed. 6.6 MB/s (1354408 bytes in 0.194s)
[------------------------------------------------ ]( 76%)
voxl-px4_1.12.31_arm64.deb: 1 file pushed. 6.2 MB/s (5260228 bytes in 0.808s)
[------------------------------------------------- ]( 78%)
voxl-px4-imu-server_0.1.2_arm64.deb: 1...shed. 4.6 MB/s (10668 bytes in 0.002s)
[--------------------------------------------------- ]( 80%)
voxl-qvio-server_0.8.2_arm64.deb: 1 fi...shed. 6.0 MB/s (50156 bytes in 0.008s)
[---------------------------------------------------- ]( 82%)
voxl-remote-id_0.0.5_arm64.deb: 1 file...shed. 4.4 MB/s (38132 bytes in 0.008s)
[----------------------------------------------------- ]( 84%)
voxl-streamer_0.4.1_arm64.deb: 1 file ...shed. 3.1 MB/s (40208 bytes in 0.012s)
[------------------------------------------------------- ]( 86%)
voxl-suite_0.9.5_arm64.deb: 1 file pushed. 1.2 MB/s (1424 bytes in 0.001s)
[-------------------------------------------------------- ]( 88%)
voxl-tag-detector_0.0.4_arm64.deb: 1 f...ed. 5.8 MB/s (1124512 bytes in 0.185s)
[--------------------------------------------------------- ]( 90%)
voxl-tflite-server_0.3.1_arm64.deb: 1 ...d. 6.2 MB/s (63432692 bytes in 9.747s)
[---------------------------------------------------------- ]( 92%)
voxl-utils_1.2.2_arm64.deb: 1 file pushed. 5.1 MB/s (36996 bytes in 0.007s)
[------------------------------------------------------------ ]( 94%)
voxl-uvc-server_0.1.3_arm64.deb: 1 fil...shed. 3.9 MB/s (11060 bytes in 0.003s)
[------------------------------------------------------------- ]( 96%)
voxl-vision-px4_1.4.0_arm64.deb: 1 fil...shed. 6.0 MB/s (95500 bytes in 0.015s)
[-------------------------------------------------------------- ]( 98%)
voxl-voxblox_1.1.3_arm64.deb: 1 file p...hed. 6.0 MB/s (726144 bytes in 0.115s)
Done Pushing
[----------------------------------------------------------------](100%)
dpkg-scanpackages: warning: package voxl-mpa-tools (filename ./voxl-mpa-tools_0.7.6_arm64.deb) is repeat but newer version; used that one and ignored data from ./voxl-mpa-tools_0.7.5_arm64.deb!
dpkg-scanpackages: warning: Packages in archive but missing from override file:
dpkg-scanpackages: warning: libmodal-cv libmodal-exposure libmodal-journal libmodal-json libmodal-pipe libqrb5165-io librc-math libvoxl-cci-direct libvoxl-cutils mavlink-camera-manager qrb5165-dfs-server qrb5165-imu-server qrb5165-system-tweaks qrb5165-tflite voxl-bind voxl-camera-calibration voxl-camera-server voxl-ceres-solver voxl-cpu-monitor voxl-docker-support voxl-eigen3 voxl-flir-server voxl-gphoto2-server voxl-jpeg-turbo voxl-libgphoto2 voxl-libuvc voxl-logger voxl-mapper voxl-mavlink voxl-mavlink-server voxl-modem voxl-mongoose voxl-mpa-to-ros voxl-mpa-tools voxl-nlopt voxl-opencv voxl-portal voxl-px4 voxl-px4-imu-server voxl-qvio-server voxl-remote-id voxl-streamer voxl-suite voxl-tag-detector voxl-tflite-server voxl-utils voxl-uvc-server voxl-vision-px4 voxl-voxblox
dpkg-scanpackages: info: Wrote 49 entries to output Packages file.
Get:1 file:/data/voxl-suite-offline-packages ./ InRelease
Ign:1 file:/data/voxl-suite-offline-packages ./ InRelease
Get:2 file:/data/voxl-suite-offline-packages ./ Release
Ign:2 file:/data/voxl-suite-offline-packages ./ Release
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:3 file:/data/voxl-suite-offline-packages ./ Packages [8065 B]
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Err:3 file:/data/voxl-suite-offline-packages ./ Packages
File not found - /data/voxl-suite-offline-packages/./Packages (2: No such file or directory)
Reading package lists... Done
N: Download is performed unsandboxed as root as file '/data/voxl-suite-offline-packages/./InRelease' couldn't be accessed by user '_apt'. - pkgAcquire::Run (13: Permission denied)
E: Failed to fetch file:/data/voxl-suite-offline-packages/./Packages File not found - /data/voxl-suite-offline-packages/./Packages (2: No such file or directory)
E: Some index files failed to download. They have been ignored, or old ones used instead.
[INFO] Installing packages on target
Reading package lists... Done
Building dependency tree
Reading state information... Done
E: Unable to locate package voxl-suite
[INFO] Pointing to correct repo
/bin/bash: voxl-configure-pkg-manager: command not found
[INFO] Done installing voxl-suite
# anubhav @ anubhav-GF63-Thin-9SC in ~/Downloads/voxl2_platform_0.9.5/voxl-suite [22:46:34]
$ adb shell
root@m0054:/#
root@m0054:/#
I am not able to flash the system image it's ending with an error File not found - /data/voxl-suite-offline-packages/./Packages (2: No such file or directory)
Flash procedure is been performed as given in the docs. Same image is installed in other computer and we were previously able to successfully able to to flash but now same problem is persisting.
below is the complete output:
Please help.
Thanks in advance
$ ./install.sh
[INFO] adb installed
[INFO] fastboot installed
----Starting System Image Flash----
Detected OS: Linux
Installer Version: 0.8
Image Version: 1.5.5
[INFO] Found adb device, rebooting to fastboot
[INFO] Found fastboot device
[WARNING] This system image flash is intended only for the following
platform: VOXL2 (m0054)
Make sure that the device that will be flashed is correct.
Flashing a device with an incorrect system image will lead
the device to be stuck in fastboot.
Would you like to continue with the VOXL2 (m0054) system image flash?
1) Yes
2) No
#? 1
[INFO] Found correct partitions
[INFO] Found all required files
Done Flashing
[----------------------------------------------------------------](100%)
rebooting...
finished. total time: 0.050s
[INFO] Waiting for ADB
[INFO] Device ready, version:
1.5.5-M0054-14.1a-perf
[INFO] Finished flashing system image!
----Installing Suite----
[INFO] adb installed
[INFO] Waiting for device
[INFO] Pushing packages to target
[ ]( 0%)
libmodal-cv_0.2.3_arm64.deb: 1 file pushed. 3.7 MB/s (460480 bytes in 0.119s)
[- ]( 2%)
libmodal-exposure_0.0.7_arm64.deb: 1 f...shed. 3.4 MB/s (11548 bytes in 0.003s)
[-- ]( 4%)
libmodal-journal_0.2.1_arm64.deb: 1 fi...ushed. 3.5 MB/s (9416 bytes in 0.003s)
[--- ]( 6%)
libmodal-json_0.4.3_arm64.deb: 1 file ...shed. 3.9 MB/s (44112 bytes in 0.011s)
[----- ]( 8%)
libmodal-pipe_2.8.2_arm64.deb: 1 file ...shed. 1.8 MB/s (83540 bytes in 0.044s)
[------ ]( 10%)
libqrb5165-io_0.1.0_arm64.deb: 1 file ...shed. 2.8 MB/s (10620 bytes in 0.004s)
[------- ]( 12%)
librc-math_1.3.0_arm64.deb: 1 file pushed. 2.7 MB/s (102816 bytes in 0.036s)
[-------- ]( 14%)
libvoxl-cci-direct_0.1.5_arm64.deb: 1 ...ushed. 1.6 MB/s (6624 bytes in 0.004s)
[---------- ]( 16%)
libvoxl-cutils_0.1.1_arm64.deb: 1 file...ushed. 1.3 MB/s (6228 bytes in 0.005s)
[----------- ]( 18%)
mavlink-camera-manager_0.1.0_arm64.deb...shed. 2.3 MB/s (27072 bytes in 0.011s)
[------------ ]( 20%)
qrb5165-dfs-server_0.1.0_arm64.deb: 1 ...shed. 1.9 MB/s (14400 bytes in 0.007s)
[-------------- ]( 22%)
qrb5165-imu-server_0.5.0_arm64.deb: 1 ...shed. 2.4 MB/s (60264 bytes in 0.024s)
[--------------- ]( 24%)
qrb5165-system-tweaks_0.1.5_arm64.deb:...ushed. 1.7 MB/s (6656 bytes in 0.004s)
[---------------- ]( 26%)
qrb5165-tflite_2.8.0-2_arm64.deb: 1 fi...d. 5.8 MB/s (11028016 bytes in 1.812s)
[----------------- ]( 28%)
voxl-bind_0.0.1_arm64.deb: 1 file pushed. 1.9 MB/s (4908 bytes in 0.003s)
[------------------- ]( 30%)
voxl-camera-calibration_0.2.3_arm64.de...shed. 2.8 MB/s (61816 bytes in 0.021s)
[-------------------- ]( 32%)
voxl-camera-server_1.3.5_arm64.deb: 1 ...hed. 3.7 MB/s (577380 bytes in 0.150s)
[--------------------- ]( 34%)
voxl-ceres-solver_1.14.0-9_arm64.deb: ...hed. 5.8 MB/s (835012 bytes in 0.137s)
[----------------------- ]( 36%)
voxl-cpu-monitor_0.3.0_arm64.deb: 1 fi...shed. 5.2 MB/s (25116 bytes in 0.005s)
[------------------------ ]( 38%)
voxl-docker-support_1.2.4_arm64.deb: 1...ushed. 3.1 MB/s (7908 bytes in 0.002s)
[------------------------- ]( 40%)
voxl-eigen3_3.4.0_arm64.deb: 1 file pu...ed. 5.0 MB/s (1013744 bytes in 0.192s)
[-------------------------- ]( 42%)
voxl-flir-server_0.2.0_arm64.deb: 1 fi...ushed. 3.1 MB/s (8136 bytes in 0.003s)
[---------------------------- ]( 44%)
voxl-gphoto2-server_0.0.10_arm64.deb: ...shed. 3.4 MB/s (31632 bytes in 0.009s)
[----------------------------- ]( 46%)
voxl-jpeg-turbo_2.1.3-4_arm64.deb: 1 f...ed. 5.4 MB/s (1150788 bytes in 0.202s)
[------------------------------ ]( 48%)
voxl-libgphoto2_0.0.4_arm64.deb: 1 fil...ed. 6.0 MB/s (1576804 bytes in 0.249s)
[-------------------------------- ]( 50%)
voxl-libuvc_1.0.7_arm64.deb: 1 file pushed. 5.2 MB/s (47412 bytes in 0.009s)
[--------------------------------- ]( 52%)
voxl-logger_0.3.4_arm64.deb: 1 file pushed. 3.1 MB/s (37968 bytes in 0.012s)
[---------------------------------- ]( 54%)
voxl-mapper_0.1.5_arm64.deb: 1 file pushed. 4.3 MB/s (489984 bytes in 0.108s)
[----------------------------------- ]( 56%)
voxl-mavlink_0.1.0_arm64.deb: 1 file p...hed. 5.6 MB/s (524696 bytes in 0.089s)
[------------------------------------- ]( 58%)
voxl-mavlink-server_0.3.0_arm64.deb: 1...shed. 4.0 MB/s (17020 bytes in 0.004s)
[-------------------------------------- ]( 60%)
voxl-modem_0.16.1_arm64.deb: 1 file pushed. 3.8 MB/s (55996 bytes in 0.014s)
[--------------------------------------- ]( 62%)
voxl-mongoose_7.7.0-1_arm64.deb: 1 fil...shed. 2.7 MB/s (72336 bytes in 0.025s)
[---------------------------------------- ]( 64%)
voxl-mpa-tools_0.7.5_arm64.deb: 1 file...shed. 2.8 MB/s (55632 bytes in 0.019s)
[------------------------------------------ ]( 66%)
voxl-mpa-tools_0.7.6_arm64.deb: 1 file...shed. 3.1 MB/s (55576 bytes in 0.017s)
[------------------------------------------- ]( 68%)
voxl-mpa-to-ros_0.3.6_arm64.deb: 1 fil...hed. 4.0 MB/s (600464 bytes in 0.144s)
[-------------------------------------------- ]( 70%)
voxl-nlopt_2.5.0-4_arm64.deb: 1 file p...hed. 6.6 MB/s (331988 bytes in 0.048s)
[---------------------------------------------- ]( 72%)
voxl-opencv_4.5.5-1_arm64.deb: 1 file ...d. 6.0 MB/s (13574024 bytes in 2.174s)
[----------------------------------------------- ]( 74%)
voxl-portal_0.5.0_arm64.deb: 1 file pu...ed. 6.1 MB/s (1354408 bytes in 0.213s)
[------------------------------------------------ ]( 76%)
voxl-px4_1.12.31_arm64.deb: 1 file pushed. 6.1 MB/s (5260228 bytes in 0.828s)
[------------------------------------------------- ]( 78%)
voxl-px4-imu-server_0.1.2_arm64.deb: 1...shed. 2.9 MB/s (10668 bytes in 0.003s)
[--------------------------------------------------- ]( 80%)
voxl-qvio-server_0.8.2_arm64.deb: 1 fi...shed. 2.7 MB/s (50156 bytes in 0.018s)
[---------------------------------------------------- ]( 82%)
voxl-remote-id_0.0.5_arm64.deb: 1 file...shed. 1.9 MB/s (38132 bytes in 0.019s)
[----------------------------------------------------- ]( 84%)
voxl-streamer_0.4.1_arm64.deb: 1 file ...shed. 5.1 MB/s (40208 bytes in 0.008s)
[------------------------------------------------------- ]( 86%)
voxl-suite_0.9.5_arm64.deb: 1 file pushed. 1.4 MB/s (1424 bytes in 0.001s)
[-------------------------------------------------------- ]( 88%)
voxl-tag-detector_0.0.4_arm64.deb: 1 f...ed. 5.9 MB/s (1124512 bytes in 0.182s)
[--------------------------------------------------------- ]( 90%)
voxl-tflite-server_0.3.1_arm64.deb: 1 ...d. 6.1 MB/s (63432692 bytes in 9.982s)
[---------------------------------------------------------- ]( 92%)
voxl-utils_1.2.2_arm64.deb: 1 file pushed. 4.9 MB/s (36996 bytes in 0.007s)
[------------------------------------------------------------ ]( 94%)
voxl-uvc-server_0.1.3_arm64.deb: 1 fil...shed. 4.6 MB/s (11060 bytes in 0.002s)
[------------------------------------------------------------- ]( 96%)
voxl-vision-px4_1.4.0_arm64.deb: 1 fil...shed. 4.4 MB/s (95500 bytes in 0.021s)
[-------------------------------------------------------------- ]( 98%)
voxl-voxblox_1.1.3_arm64.deb: 1 file p...hed. 5.5 MB/s (726144 bytes in 0.126s)
Done Pushing
[----------------------------------------------------------------](100%)
dpkg-scanpackages: warning: package voxl-mpa-tools (filename ./voxl-mpa-tools_0.7.6_arm64.deb) is repeat but newer version; used that one and ignored data from ./voxl-mpa-tools_0.7.5_arm64.deb!
dpkg-scanpackages: warning: Packages in archive but missing from override file:
dpkg-scanpackages: warning: libmodal-cv libmodal-exposure libmodal-journal libmodal-json libmodal-pipe libqrb5165-io librc-math libvoxl-cci-direct libvoxl-cutils mavlink-camera-manager qrb5165-dfs-server qrb5165-imu-server qrb5165-system-tweaks qrb5165-tflite voxl-bind voxl-camera-calibration voxl-camera-server voxl-ceres-solver voxl-cpu-monitor voxl-docker-support voxl-eigen3 voxl-flir-server voxl-gphoto2-server voxl-jpeg-turbo voxl-libgphoto2 voxl-libuvc voxl-logger voxl-mapper voxl-mavlink voxl-mavlink-server voxl-modem voxl-mongoose voxl-mpa-to-ros voxl-mpa-tools voxl-nlopt voxl-opencv voxl-portal voxl-px4 voxl-px4-imu-server voxl-qvio-server voxl-remote-id voxl-streamer voxl-suite voxl-tag-detector voxl-tflite-server voxl-utils voxl-uvc-server voxl-vision-px4 voxl-voxblox
dpkg-scanpackages: info: Wrote 49 entries to output Packages file.
Get:1 file:/data/voxl-suite-offline-packages ./ InRelease
Ign:1 file:/data/voxl-suite-offline-packages ./ InRelease
Get:2 file:/data/voxl-suite-offline-packages ./ Release
Ign:2 file:/data/voxl-suite-offline-packages ./ Release
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:3 file:/data/voxl-suite-offline-packages ./ Packages [8065 B]
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Err:3 file:/data/voxl-suite-offline-packages ./ Packages
File not found - /data/voxl-suite-offline-packages/./Packages (2: No such file or directory)
Reading package lists... Done
N: Download is performed unsandboxed as root as file '/data/voxl-suite-offline-packages/./InRelease' couldn't be accessed by user '_apt'. - pkgAcquire::Run (13: Permission denied)
E: Failed to fetch file:/data/voxl-suite-offline-packages/./Packages File not found - /data/voxl-suite-offline-packages/./Packages (2: No such file or directory)
E: Some index files failed to download. They have been ignored, or old ones used instead.
[INFO] Installing packages on target
Reading package lists... Done
Building dependency tree
Reading state information... Done
E: Unable to locate package voxl-suite
[INFO] Pointing to correct repo
/bin/bash: voxl-configure-pkg-manager: command not found
[INFO] Done installing voxl-suite
----Installation Completed----
Hello team,
I want to use IMX412 camera for snapshots with 4k resolution but unable to do.
the below command is with voxl-camera-server_1.6.1_arm64.deb
voxl2:~$ voxl-camera-server
=================================================================
configuration for 1 cameras:
cam #0
name: hires
sensor type: imx412
isEnabled: 1
camId: 0
camId2: -1
fps: 30
en_preview: 0
pre_width: 2048
pre_height: 1536
pre_format: nv21
en_small_video: 1
small_video_width: 1024
small_video_height: 768
en_large_video: 1
large_video_width: 4096
large_video_height: 2160
en_snapshot: 1
snap_width: 4160
snap_height: 3120
ae_mode: isp
standby_enabled: 0
decimator: 1
independent_exposure:0
=================================================================
Starting Camera: hires
ERROR: Camera 0 failed to find supported record config: 4096x2160
ERROR: Failed to start camera: hires, exiting
and in this same camera server version when I have downgraded the resolution, camera started working but when I trigger voxl-portal to see the Hires image output camera is failing. below is the output.
voxl2:~$ voxl-camera-server
=================================================================
configuration for 1 cameras:
cam #0
name: hires
sensor type: imx412
isEnabled: 1
camId: 0
camId2: -1
fps: 30
en_preview: 0
pre_width: 2048
pre_height: 1536
pre_format: nv21
en_small_video: 1
small_video_width: 2048
small_video_height: 1536
en_large_video: 1
large_video_width: 2048
large_video_height: 1536
en_snapshot: 1
snap_width: 2048
snap_height: 1536
ae_mode: isp
standby_enabled: 0
decimator: 1
independent_exposure:0
=================================================================
Starting Camera: hires
WARNING: Port Def 0:
Count Min: 8
Count Actual: 16
Size: 0x480000
Buffers Contiguous: Yes
Buffer Alignment: 0
WARNING: Port Def 1:
Count Min: 4
Count Actual: 16
Size: 0x2d0000
Buffers Contiguous: No
Buffer Alignment: 0
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
WARNING: Port Def 0:
Count Min: 8
Count Actual: 16
Size: 0x480000
Buffers Contiguous: Yes
Buffer Alignment: 0
WARNING: Port Def 1:
Count Min: 4
Count Actual: 16
Size: 0x2d0000
Buffers Contiguous: No
Buffer Alignment: 0
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
gbm_create_device(156): Info: backend name is: msm_drm
------ voxl-camera-server: Camera server is now running
Segmentation fault:
Fault thread: cam0-request(tid: 6949)
Fault address: (nil)
Unknown reason.
Segmentation fault
Thanks.
Hi,
I am trying to get ros-melodic working in voxl. I have tried different methods. one is to directly pull the ros-melodic image for aarch64, but it didn't worked. the output is shown below.
voxl:/$ docker run -it ros:melodic-ros-core-bionic
exec format error
Error response from daemon: Cannot start container 108f94e913a69c30d7c8d9dcd73efa742072a63972fd5a2e9b46151c1bdd9527: [8] System error: exec format error
other one is to pull ubuntu-18.04 image then do the development but I am unable to do so.
voxl:/$ docker pull ubuntu:bionic
Pulling repository docker.io/library/ubuntu
Error: Status 410 trying to pull repository library/ubuntu: "<html>\r\n<head><title>410 Gone</title></head>\r\n<body>\r\n<center><h1>410 Gone</h1></center>\r\n<hr><center>openresty</center>\r\n</body>\r\n</html>\r\n"
voxl:/$ docker pull ubuntu:bionic-20230530
Pulling repository docker.io/library/ubuntu
Error: Status 410 trying to pull repository library/ubuntu: "<html>\r\n<head><title>410 Gone</title></head>\r\n<body>\r\n<center><h1>410 Gone</h1></center>\r\n<hr><center>openresty</center>\r\n</body>\r\n</html>\r\n"
voxl:/$
In all the cases I made sure that these immages are compatible with arm64v8 architecture.
If anyone knows how to resolve this issues, please help.
Thanks.
Hello ModalAI Team,
I have been using TOF sensor for obstacle avoidance. I am noticing that sensor is taking ghost point clouds during mission.
I have made sure that sensor is not getting interfered with the hardware.
How this issue can be resolved.
Thanks.
Anubhav
Hi @modaltb,
We were making a mistake of connecting the mavros with the UART which is being used by mavlink server, hence creating the traffic in communication. Now we are connecting mavros with VVPX4 and it's working fine.
Thanks.
Hello ModalAi Team,
I am using flightcore as the external fcu with voxl2, where it's connected from J1 port of fcu to J3 of M0125 expansion board connected to voxl2.
With this setup we are able to get the QGC connection with udp, which means voxl-mavlink-server is sending and receiving the data, and also it flies manually, but we are getting following error while using MAVROS with any manual control.
[ WARN] [1662434325.755393630]: VER: broadcast request timeout, retries left 4
[ WARN] [1662434326.770163473]: VER: broadcast request timeout, retries left 3
[ WARN] [1662434332.762806700]: CMD: Command 520 -- wait ack timeout
[ WARN] [1662434332.763577742]: VER: unicast request timeout, retries left 2
[ INFO] [1662434333.752030710]: HP: requesting home position
[ WARN] [1662434337.781705396]: CMD: Command 520 -- wait ack timeout
[ WARN] [1662434337.782858573]: VER: unicast request timeout, retries left 1
[ WARN] [1662434337.783908729]: PR: request param #0 timeout, retries left 2, and 575 params still missing
[ WARN] [1662434338.757107062]: CMD: Command 410 -- wait ack timeout
[ERROR] [1662434338.757693833]: PR: receiving not complete
[ INFO] [1662434338.759876541]: WP: mission received
[ WARN] [1662434338.786837791]: PR: request param #0 timeout, retries left 1, and 575 params still missing
[ERROR] [1662434338.789770969]: PR: receiving not complete
[ERROR] [1662434338.808116854]: PR: receiving not complete
[ERROR] [1662434338.822837635]: PR: receiving not complete
[ERROR] [1662434338.845605291]: PR: receiving not complete
[ERROR] [1662434338.857837427]: PR: receiving not complete
[ WARN] [1662434339.758370708]: GF: timeout, retries left 2
[ WARN] [1662434339.758651385]: RP: timeout, retries left 2
[ WARN] [1662434339.787232739]: PR: request param #0 timeout, retries left 0, and 575 params still missing
[ WARN] [1662434340.758813676]: GF: timeout, retries left 1
[ WARN] [1662434340.759162999]: RP: timeout, retries left 1
[ERROR] [1662434340.787672270]: PR: request param #0 completely missing.
Below is our mavlink server config file
{
"px4_uart_bus": 1,
"px4_uart_baudrate": 921600,
"udp_port_to_px4": 14556,
"udp_port_from_px4": 14557,
"external_fc": true
}
In QGC SER_TEL2_BAUD is 921600.
Output of voxl-mavlink-server -r
voxl2:/$ voxl-mavlink-server -r
Enabling UDP recv debugging
loading our own config file
=================================================================
Parameters as loaded from config file:
px4_uart_bus: 1
px4_uart_baudrate: 921600
udp_port_to_px4: 14556
udp_port_from_px4: 14557
external_fc: 1
=================================================================
Successfully opened /dev/ttyHS1
starting receive thread
RECV msg ID: 30 sysid: 1 from port: /dev/ttyHS1
RECV msg ID: 65 sysid: 1 from port: /dev/ttyHS1
RECV msg ID: 30 sysid: 1 from port: /dev/ttyHS1
RECV msg ID: 331 sysid: 1 from port: /dev/ttyHS1
RECV msg ID: 31 sysid: 1 from port: /dev/ttyHS1
RECV msg ID: 30 sysid: 1 from port: /dev/ttyHS1
Init complete, entering main loop
WARNING: UDP local listener dropped 1 packets
RECV msg ID: 105 sysid: 1 from port: /dev/ttyHS1
RECV msg ID: 31 sysid: 1 from port: /dev/ttyHS1
RECV msg ID: 65 sysid: 1 from port: /dev/ttyHS1
RECV msg ID: 30 sysid: 1 from port: /dev/ttyHS1
RECV msg ID: 32 sysid: 1 from port: /dev/ttyHS1
It will be helpful if you can provide us with information that may resolve the above issue.
Thanks.
Below is the output of the command qshell modalai_esc status while the ESC was connected and powered on:
INFO [qshell] Send cmd: 'modalai_esc status'
INFO [muorb] SLPI: Marking DeviceNode(qshell_req) as advertised in process_remote_topic
INFO [muorb] SLPI: qshell gotten: modalai_esc status
INFO [muorb] SLPI: Max update rate: 0 Hz
INFO [muorb] SLPI: Outputs on: no
INFO [muorb] SLPI: UART port: 2
INFO [muorb] SLPI: UART open: yes
INFO [muorb] SLPI:
INFO [muorb] SLPI: Params: UART_ESC_CONFIG: 1
INFO [muorb] SLPI: Params: UART_ESC_BAUD: 250000
INFO [muorb] SLPI: Params: UART_ESC_MOTOR1: 3
INFO [muorb] SLPI: Params: UART_ESC_MOTOR2: 2
INFO [muorb] SLPI: Params: UART_ESC_MOTOR3: 4
INFO [muorb] SLPI: Params: UART_ESC_MOTOR4: 1
INFO [muorb] SLPI: Params: UART_ESC_RPM_MIN: 1000
INFO [muorb] SLPI: Params: UART_ESC_RPM_MAX: 10500
INFO [muorb] SLPI:
INFO [muorb] SLPI: -- ID: 0
INFO [muorb] SLPI: State: 0
INFO [muorb] SLPI: Requested: 0 RPM
INFO [muorb] SLPI: Measured: 0 RPM
INFO [muorb] SLPI: Command Counter: 0
INFO [muorb] SLPI: Voltage: 0.000000 VDC
INFO [muorb] SLPI:
INFO [muorb] SLPI: -- ID: 1
INFO [muorb] SLPI: State: 0
INFO [muorb] SLPI: Requested: 0 RPM
INFO [muorb] SLPI: Measured: 0 RPM
INFO [muorb] SLPI: Command Counter: 0
INFO [muorb] SLPI: Voltage: 0.000000 VDC
INFO [muorb] SLPI:
INFO [muorb] SLPI: -- ID: 2
INFO [muorb] SLPI: State: 0
INFO [muorb] SLPI: Requested: 0 RPM
INFO [muorb] SLPI: Measured: 0 RPM
INFO [muorb] SLPI: Command Counter: 0
INFO [muorb] SLPI: Voltage: 0.000000 VDC
INFO [muorb] SLPI:
INFO [muorb] SLPI: -- ID: 3
INFO [muorb] SLPI: State: 0
INFO [muorb] SLPI: Requested: 0 RPM
INFO [muorb] SLPI: Measured: 0 RPM
INFO [muorb] SLPI: Command Counter: 0
INFO [muorb] SLPI: Voltage: 0.000000 VDC
INFO [muorb] SLPI:
INFO [muorb] SLPI: modalai_esc: cycle: 85537 events, 9228157us elapsed, 107.88us avg, min 4us max 440us 9.18
INFO [muorb] SLPI: modalai_esc: output update interval: 85534 events, 2056.72us avg, min 1249us max 3206224u
INFO [muorb] SLPI: control latency: 85533 events, 49030648us elapsed, 573.24us avg, min 372us max 925us 62.2
INFO [muorb] SLPI: Switched to rate_ctrl work queue: 1
INFO [muorb] SLPI: Mixer loaded: yes
INFO [muorb] SLPI: Driver instance: 0
INFO [muorb] SLPI: Channel Configuration:
INFO [muorb] SLPI: Channel 0: value: 0, failsafe: 0, disarmed: 0, min: 1000, max: 10500
INFO [muorb] SLPI: Channel 1: value: 0, failsafe: 0, disarmed: 0, min: 1000, max: 10500
INFO [muorb] SLPI: Channel 2: value: 0, failsafe: 0, disarmed: 0, min: 1000, max: 10500
INFO [muorb] SLPI: Channel 3: value: 0, failsafe: 0, disarmed: 0, min: 1000, max: 10500
INFO [muorb] SLPI: Ok executing command: modalai_esc status
INFO [muorb] SLPI: Sending qshell retval with timestamp 949539937, current timestamp 949539938
INFO [qshell] qshell return value timestamp: 949539937, local time: 949553192
Below is the output showing that after configuring docker through command voxl-configure-docker-support and then stopping, disabling the docker-daemon. After this I was not able to boot the device, as you can see at last it's not showing any devices.
voxl2:/$ voxl-configure-docker-support
Starting Wizard
docker-ce is not currently installed.
Do you want to install docker-ce from the official docker repo?
This requires a working internet connection.
1) yes
2) no
#? 1
Reading package lists... Done
Building dependency tree
Reading state information... Done
Package 'docker-engine' is not installed, so not removed
Package 'docker' is not installed, so not removed
Package 'containerd' is not installed, so not removed
Package 'docker.io' is not installed, so not removed
Package 'runc' is not installed, so not removed
0 upgraded, 0 newly installed, 0 to remove and 32 not upgraded.
Get:1 file:/data/voxl-suite-offline-packages ./ InRelease
Ign:1 file:/data/voxl-suite-offline-packages ./ InRelease
Get:2 file:/data/voxl-suite-offline-packages ./ Release
Ign:2 file:/data/voxl-suite-offline-packages ./ Release
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:3 file:/data/voxl-suite-offline-packages ./ Packages
Ign:3 file:/data/voxl-suite-offline-packages ./ Packages
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:3 file:/data/voxl-suite-offline-packages ./ Packages [7215 B]
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Get:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Ign:4 file:/data/voxl-suite-offline-packages ./ Translation-en
Hit:5 http://ports.ubuntu.com/ubuntu-ports bionic InRelease
Ign:7 http://voxl-packages.modalai.com qrb5165 InRelease
Get:8 https://download.docker.com/linux/ubuntu bionic InRelease [64.4 kB]
Get:9 http://ports.ubuntu.com/ubuntu-ports bionic-backports InRelease [83.3 kB]
Hit:11 http://voxl-packages.modalai.com qrb5165 Release
Get:12 https://download.docker.com/linux/ubuntu bionic/stable arm64 Packages [30.0 kB]
Ign:13 http://voxl-packages.modalai.com qrb5165 Release.gpg
Get:14 http://ports.ubuntu.com/ubuntu-ports bionic-security InRelease [88.7 kB]
Get:10 http://packages.ros.org/ros/ubuntu bionic InRelease [4680 B]
Get:15 http://voxl-packages.modalai.com qrb5165/stable arm64 Packages [12.6 kB]
Get:6 http://ports.ubuntu.com/ubuntu-ports bionic-updates InRelease [88.7 kB]
Get:16 http://ports.ubuntu.com/ubuntu-ports bionic-backports/main arm64 Packages [53.2 kB]
Get:17 http://packages.ros.org/ros/ubuntu bionic/main arm64 Packages [782 kB]
Get:18 http://ports.ubuntu.com/ubuntu-ports bionic-backports/main Translation-en [14.6 kB]
Get:19 http://ports.ubuntu.com/ubuntu-ports bionic-backports/universe arm64 Packages [17.8 kB]
Get:20 http://ports.ubuntu.com/ubuntu-ports bionic-backports/universe Translation-en [8668 B]
Get:21 http://ports.ubuntu.com/ubuntu-ports bionic-security/main arm64 Packages [1409 kB]
Get:22 http://ports.ubuntu.com/ubuntu-ports bionic-security/main Translation-en [433 kB]
Get:23 http://ports.ubuntu.com/ubuntu-ports bionic-security/restricted arm64 Packages [4816 B]
Get:24 http://ports.ubuntu.com/ubuntu-ports bionic-security/restricted Translation-en [142 kB]
Get:25 http://ports.ubuntu.com/ubuntu-ports bionic-security/universe arm64 Packages [1119 kB]
Get:26 http://ports.ubuntu.com/ubuntu-ports bionic-security/universe Translation-en [290 kB]
Get:27 http://ports.ubuntu.com/ubuntu-ports bionic-security/multiverse arm64 Packages [2668 B]
Get:28 http://ports.ubuntu.com/ubuntu-ports bionic-security/multiverse Translation-en [3908 B]
Get:29 http://ports.ubuntu.com/ubuntu-ports bionic-updates/main arm64 Packages [1712 kB]
Get:30 http://ports.ubuntu.com/ubuntu-ports bionic-updates/main Translation-en [523 kB]
Get:31 http://ports.ubuntu.com/ubuntu-ports bionic-updates/restricted arm64 Packages [5392 B]
Get:32 http://ports.ubuntu.com/ubuntu-ports bionic-updates/restricted Translation-en [150 kB]
Get:33 http://ports.ubuntu.com/ubuntu-ports bionic-updates/universe arm64 Packages [1669 kB]
Get:34 http://ports.ubuntu.com/ubuntu-ports bionic-updates/universe Translation-en [404 kB]
Get:35 http://ports.ubuntu.com/ubuntu-ports bionic-updates/multiverse arm64 Packages [4944 B]
Get:36 http://ports.ubuntu.com/ubuntu-ports bionic-updates/multiverse Translation-en [6088 B]
Fetched 9128 kB in 28s (322 kB/s)
Reading package lists... Done
Building dependency tree
Reading state information... Done
147 packages can be upgraded. Run 'apt list --upgradable' to see them.
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following additional packages will be installed:
dbus dbus-user-session docker-ce-rootless-extras libdbus-1-3 pigz
Suggested packages:
cgroupfs-mount | cgroup-lite
Recommended packages:
slirp4netns
The following NEW packages will be installed:
containerd.io dbus-user-session docker-ce docker-ce-cli docker-ce-rootless-extras pigz
The following packages will be upgraded:
dbus libdbus-1-3
2 upgraded, 6 newly installed, 0 to remove and 145 not upgraded.
Need to get 77.7 MB/77.8 MB of archives.
After this operation, 320 MB of additional disk space will be used.
Get:1 https://download.docker.com/linux/ubuntu bionic/stable arm64 containerd.io arm64 1.6.14-1 [19.9 MB]
Get:2 http://ports.ubuntu.com/ubuntu-ports bionic-updates/main arm64 dbus arm64 1.12.2-1ubuntu1.4 [130 kB]
Get:3 http://ports.ubuntu.com/ubuntu-ports bionic-updates/main arm64 libdbus-1-3 arm64 1.12.2-1ubuntu1.4 [152 kB]
Get:4 http://ports.ubuntu.com/ubuntu-ports bionic-updates/main arm64 dbus-user-session arm64 1.12.2-1ubuntu1.4 [9388 B]
Get:5 https://download.docker.com/linux/ubuntu bionic/stable arm64 docker-ce-cli arm64 5:20.10.22~3-0~ubuntu-bionic [37.2 MB]
Get:6 https://download.docker.com/linux/ubuntu bionic/stable arm64 docker-ce arm64 5:20.10.22~3-0~ubuntu-bionic [12.7 MB]
Get:7 https://download.docker.com/linux/ubuntu bionic/stable arm64 docker-ce-rootless-extras arm64 5:20.10.22~3-0~ubuntu-bionic [7572 kB]
Fetched 77.7 MB in 1min 9s (1129 kB/s)
debconf: delaying package configuration, since apt-utils is not installed
Selecting previously unselected package pigz.
(Reading database ... 86735 files and directories currently installed.)
Preparing to unpack .../0-pigz_2.4-1_arm64.deb ...
Unpacking pigz (2.4-1) ...
Preparing to unpack .../1-dbus_1.12.2-1ubuntu1.4_arm64.deb ...
Unpacking dbus (1.12.2-1ubuntu1.4) over (1.12.2-1ubuntu1.3) ...
Preparing to unpack .../2-libdbus-1-3_1.12.2-1ubuntu1.4_arm64.deb ...
Unpacking libdbus-1-3:arm64 (1.12.2-1ubuntu1.4) over (1.12.2-1ubuntu1.3) ...
Selecting previously unselected package containerd.io.
Preparing to unpack .../3-containerd.io_1.6.14-1_arm64.deb ...
Unpacking containerd.io (1.6.14-1) ...
Selecting previously unselected package dbus-user-session.
Preparing to unpack .../4-dbus-user-session_1.12.2-1ubuntu1.4_arm64.deb ...
Unpacking dbus-user-session (1.12.2-1ubuntu1.4) ...
Selecting previously unselected package docker-ce-cli.
Preparing to unpack .../5-docker-ce-cli_5%3a20.10.22~3-0~ubuntu-bionic_arm64.deb ...
Unpacking docker-ce-cli (5:20.10.22~3-0~ubuntu-bionic) ...
Selecting previously unselected package docker-ce.
Preparing to unpack .../6-docker-ce_5%3a20.10.22~3-0~ubuntu-bionic_arm64.deb ...
Unpacking docker-ce (5:20.10.22~3-0~ubuntu-bionic) ...
Selecting previously unselected package docker-ce-rootless-extras.
Preparing to unpack .../7-docker-ce-rootless-extras_5%3a20.10.22~3-0~ubuntu-bionic_arm64.deb ...
Unpacking docker-ce-rootless-extras (5:20.10.22~3-0~ubuntu-bionic) ...
Setting up containerd.io (1.6.14-1) ...
Created symlink /etc/systemd/system/multi-user.target.wants/containerd.service → /lib/systemd/system/containerd.service.
Setting up docker-ce-cli (5:20.10.22~3-0~ubuntu-bionic) ...
Setting up pigz (2.4-1) ...
Setting up libdbus-1-3:arm64 (1.12.2-1ubuntu1.4) ...
Setting up docker-ce (5:20.10.22~3-0~ubuntu-bionic) ...
Created symlink /etc/systemd/system/multi-user.target.wants/docker.service → /lib/systemd/system/docker.service.
Created symlink /etc/systemd/system/sockets.target.wants/docker.socket → /lib/systemd/system/docker.socket.
Setting up dbus (1.12.2-1ubuntu1.4) ...
A reboot is required to replace the running dbus-daemon.
Please reboot the system when convenient.
Setting up dbus-user-session (1.12.2-1ubuntu1.4) ...
Setting up docker-ce-rootless-extras (5:20.10.22~3-0~ubuntu-bionic) ...
Processing triggers for systemd (237-3ubuntu10.53) ...
Processing triggers for man-db (2.8.3-2ubuntu0.1) ...
Processing triggers for libc-bin (2.27-3ubuntu1.2) ...
disabling original docker service
Synchronizing state of docker.service with SysV service script with /lib/systemd/systemd-sysv-install.
Executing: /lib/systemd/systemd-sysv-install disable docker
Warning: Stopping docker.service, but it can still be activated by:
docker.socket
disabling original docker service
Synchronizing state of docker.service with SysV service script with /lib/systemd/systemd-sysv-install.
Executing: /lib/systemd/systemd-sysv-install disable docker
Warning: Stopping docker.service, but it can still be activated by:
docker.socket
enabling modalai docker-daemon service
loading hello-world docker image
successfully loaded hello-world
hello-world docker image successfully loaded
Do you want to wipe the /etc/modalai/docker-autorun-script.sh file
back to factory default?
1) yes
2) no
#? 1
Copying default docker-autorun-script.sh to /etc/modalai/
Do you want to enable the modalai docker-daemon systemctl service?
This service is the same as the original docker systemctl service
but with customizations for VOXL. The original service will be
disabled and must remain disabled
1) yes
2) no
#? 1
disabling original docker service
Synchronizing state of docker.service with SysV service script with /lib/systemd/systemd-sysv-install.
Executing: /lib/systemd/systemd-sysv-install disable docker
Warning: Stopping docker.service, but it can still be activated by:
docker.socket
enabling modalai docker-daemon service
Do you want to enable the modalai docker-autorun systemctl service?
this will let you configure a docker image to load on boot using
the user-configurable /etc/modalai/docker-autorun.sh file
1) yes
2) no
#? 1
disabling original docker service
Synchronizing state of docker.service with SysV service script with /lib/systemd/systemd-sysv-install.
Executing: /lib/systemd/systemd-sysv-install disable docker
Warning: Stopping docker.service, but it can still be activated by:
docker.socket
enabling modalai docker-daemon service
detected hello-world docker image already loaded
enabling docker-autorun
Created symlink /etc/systemd/system/default.target.wants/docker-autorun.service → /etc/systemd/system/docker-autorun.service.
done configuring voxl-docker-support
voxl2:/$ voxl-inspect-services
Service Name | Enabled | Running | CPU Usage
---------------------------------------------------------------
docker-autorun | Enabled | Not Running |
docker-daemon | Enabled | Running | 0.0
modallink-relink | Disabled | Not Running |
voxl-camera-server | Enabled | Not Running |
voxl-cpu-monitor | Enabled | Running | 0.0
voxl-dfs-server | Disabled | Not Running |
voxl-imu-server | Enabled | Running | 5.6
voxl-mavlink-server | Enabled | Running | 0.0
voxl-modem | Disabled | Not Running |
voxl-portal | Enabled | Running | 0.0
voxl-px4-imu-server | Disabled | Not Running |
voxl-px4 | Enabled | Not Running |
voxl-qvio-server | Enabled | Running | 0.0
voxl-softap | Disabled | Not Running |
voxl-static-ip | Disabled | Not Running |
voxl-streamer | Disabled | Not Running |
voxl-tag-detector | Disabled | Not Running |
voxl-tflite-server | Disabled | Not Running |
voxl-time-sync | Disabled | Not Running |
voxl-vision-px4 | Enabled | Running | 0.0
voxl-wait-for-fs | Enabled | Completed |
voxl2:/$ systemctl stop docker-daemon
voxl2:/$ voxl-inspect-services
Service Name | Enabled | Running | CPU Usage
---------------------------------------------------------------
docker-autorun | Enabled | Not Running |
docker-daemon | Enabled | Not Running |
modallink-relink | Disabled | Not Running |
voxl-camera-server | Enabled | Not Running |
voxl-cpu-monitor | Enabled | Running | 0.0
voxl-dfs-server | Disabled | Not Running |
voxl-imu-server | Enabled | Running | 5.3
voxl-mavlink-server | Enabled | Running | 0.0
voxl-modem | Disabled | Not Running |
voxl-portal | Enabled | Running | 0.0
voxl-px4-imu-server | Disabled | Not Running |
voxl-px4 | Enabled | Not Running |
voxl-qvio-server | Enabled | Running | 0.0
voxl-softap | Disabled | Not Running |
voxl-static-ip | Disabled | Not Running |
voxl-streamer | Disabled | Not Running |
voxl-tag-detector | Disabled | Not Running |
voxl-tflite-server | Disabled | Not Running |
voxl-time-sync | Disabled | Not Running |
voxl-vision-px4 | Enabled | Running | 0.0
voxl-wait-for-fs | Enabled | Completed |
voxl2:/$ systemctl disable docker-daemon
Removed /etc/systemd/system/multi-user.target.wants/docker-daemon.service.
voxl2:/$ exit
exit
# anubhav @ anubhav-GF63-Thin-9SC in ~/voxl2/voxl2_platform_1.3.1-0.8 [12:05:16]
$ adb shell
error: no devices/emulators found
# anubhav @ anubhav-GF63-Thin-9SC in ~/voxl2/voxl2_platform_1.3.1-0.8 [13:30:05] C:1
$ adb shell
error: no devices/emulators found
# anubhav @ anubhav-GF63-Thin-9SC in ~/voxl2/voxl2_platform_1.3.1-0.8 [13:30:07] C:1
$ adb shell
error: no devices/emulators found
# anubhav @ anubhav-GF63-Thin-9SC in ~/voxl2/voxl2_platform_1.3.1-0.8 [13:30:08] C:1
$ adb shell
error: no devices/emulators found
# anubhav @ anubhav-GF63-Thin-9SC in ~/voxl2/voxl2_platform_1.3.1-0.8 [13:30:09] C:1
$ adb devices
List of devices attached
# anubhav @ anubhav-GF63-Thin-9SC in ~/voxl2/voxl2_platform_1.3.1-0.8 [13:30:16]
$ adb wait-for-device
^C
Hello Dev Team,
I have noticed that voxl2 is not booting after using docker, even after making sure while shutting down voxl2 to exit from a docker container.
What might be the issue? And how can I avoid it in future?
Thanks in advance!
Hi @Alex-Kushleyev,
I have tried running the above command:
voxl2:~$ px4-qshell modalai_esc status
INFO [qshell] Send cmd: 'modalai_esc status'
INFO [qshell] qshell return value timestamp: 798550454, local time: 798557832
voxl2:/$ px4-qshell param show UART_ESC*
INFO [qshell] Send cmd: 'param show UART_ESC*'
INFO [qshell] qshell return value timestamp: 785736853, local time: 785740154
I think voxl2 is not detecting ESC, how can I resolve this?
Hi,
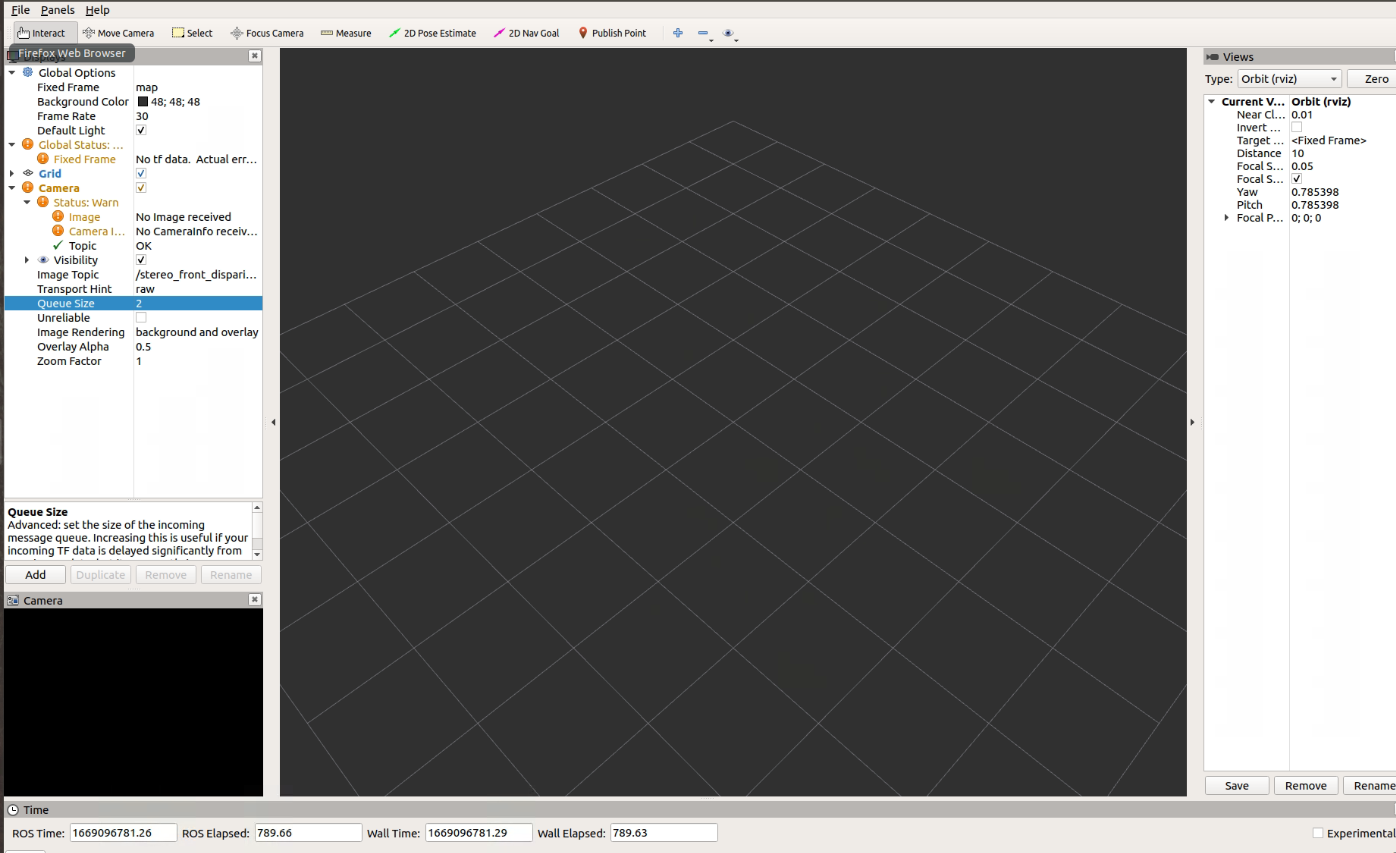
I have done the the setup of ros in voxl2, and when I run voxl-mpa-to-ros I am not able to see any output from the cameras but they are working properly as I can see output in voxl-portal.
How can I solve this?
Below I have shown output of the command, followed by output from rviz, and then voxl-portal output.
voxl2:~$ roslaunch voxl_mpa_to_ros voxl_mpa_to_ros.launch
... logging to /home/root/.ros/log/43200f32-599b-11ec-9105-14ebb6467881/roslaunch-m0054-8826.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://m0054:41883/
SUMMARY
========
PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.13
NODES
/
voxl_mpa_to_ros_node (voxl_mpa_to_ros/voxl_mpa_to_ros_node)
auto-starting new master
process[master]: started with pid [8882]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 43200f32-599b-11ec-9105-14ebb6467881
process[rosout-1]: started with pid [8911]
started core service [/rosout]
process[voxl_mpa_to_ros_node-2]: started with pid [8914]
MPA to ROS app is now running
Found new interface: hires
Found new interface: qvio_overlay
Found new interface: stereo_front
Found new interface: stereo_front_disparity
Found new interface: stereo_front_disparity_scaled
Found new interface: stereo_rear
Found new interface: stereo_rear_disparity
Found new interface: stereo_rear_disparity_scaled
Found new interface: tracking
Found new interface: imu_apps
Found new interface: stereo_front_pc
Found new interface: stereo_rear_pc
Found new interface: voa_pc_out
Found new interface: qvio
@Chad-Sweet
Can I do the same without ros? by just modifying offboard_figure_eight.c given here such that it uses it's depth map just to maintain certain distance from obstacles and stop if any obstacle new obstacle come in front of it.
If so, how can I do it?