QGC obstacle display bug?
-
Im using a brand new Seeker drone kit.
While setting up, I noticed that there is a issue with how QGC displays the obstacles reported by VOXL - it seems to be offset 90 degrees to the right.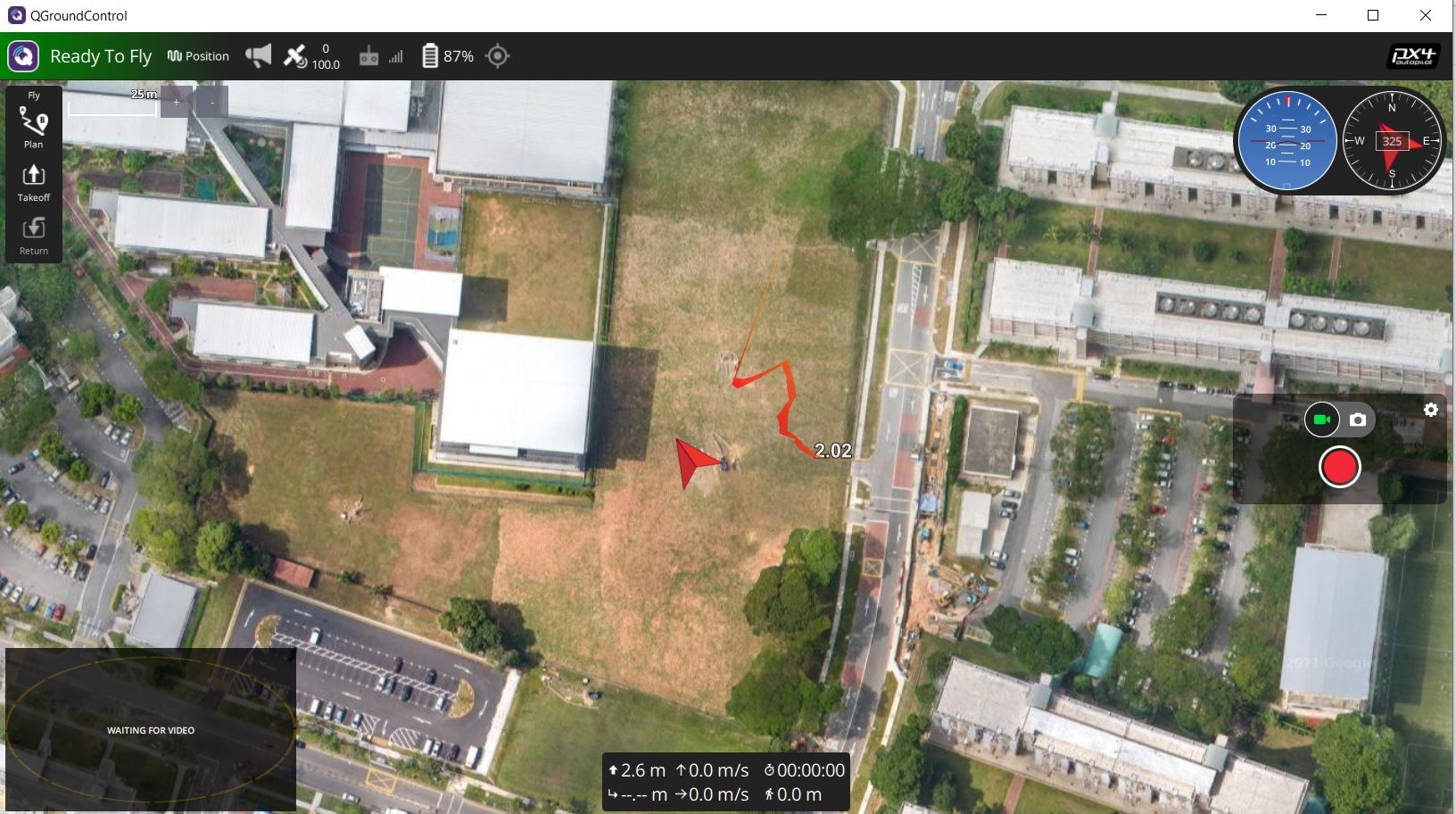
I took a look at how the the voa manager (https://gitlab.com/voxl-public/modal-pipe-architecture/voxl-vision-px4/-/blob/master/src/voa_manager.c) populates the obstacles info into the OBSTACLE_DISTANCE message (https://mavlink.io/en/messages/common.html#OBSTACLE_DISTANCE) and it seems to agree with how i understand the message is to be used.
Does anyone face the same problem? Is this a QGC bug or is the VOXL sending the obstacles incorrectly to PX4?
-
Hi @hmlow
I am facing the same issue as well!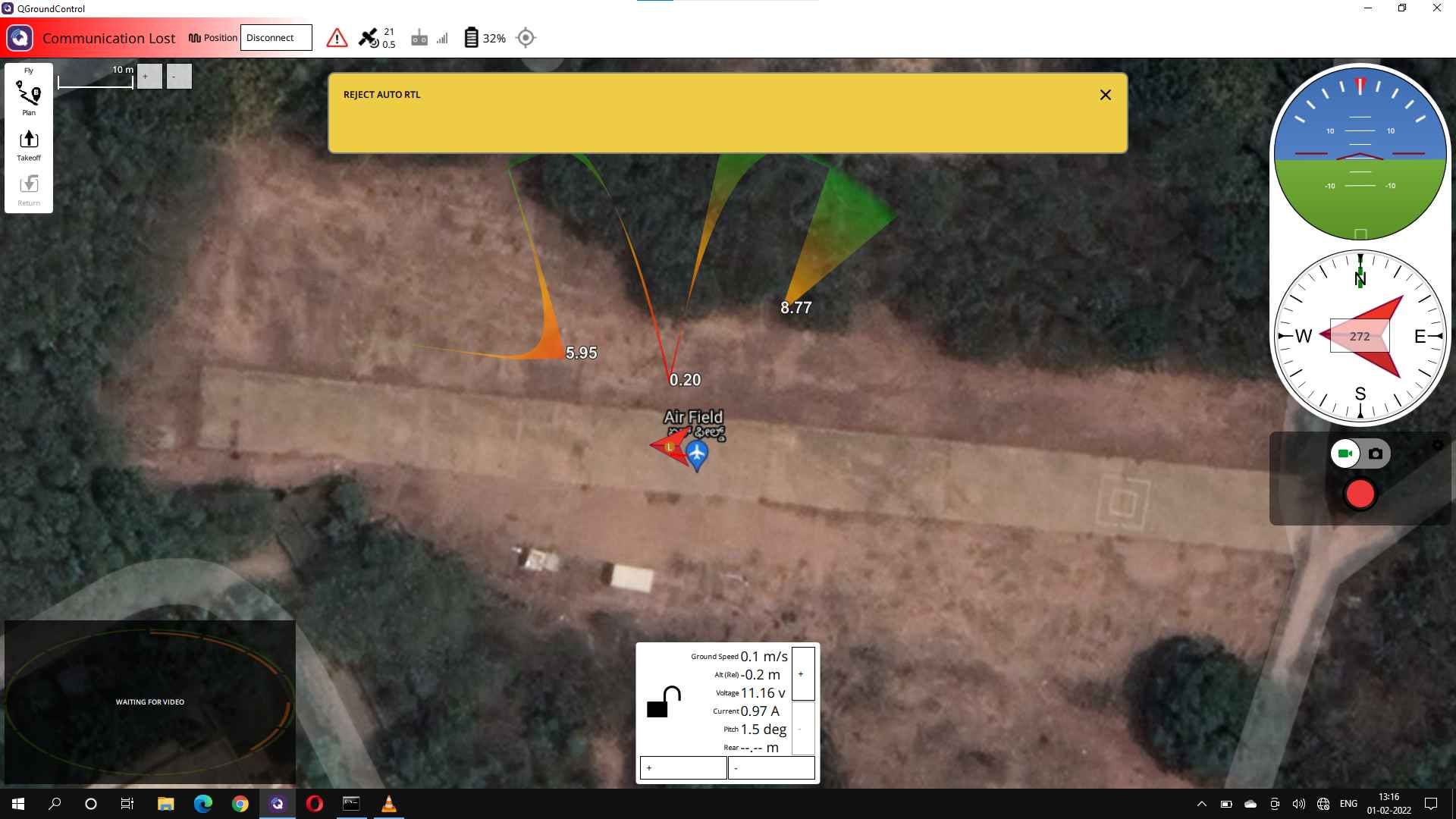
Overlay of obstacle during collision prevention
Hi All I am trying out the VOA at moment, it works as intended! But i have this confusion when it comes to the obstacle overlay that shows on the GCS. Here ...
ModalAI Forum (forum.modalai.com)
Thanks & Regards,
Mohammed Naveed -
Hi, we have not actually used QGC to debug collision prevention ourselves.
The tools we use to debug collision prevention can be found on our docs here
If you find anything related to QGC integration, a follow-up would be appreciated!
-
Hi @hmlow
I am facing the same issue as well!
Overlay of obstacle during collision prevention
Hi All I am trying out the VOA at moment, it works as intended! But i have this confusion when it comes to the obstacle overlay that shows on the GCS. Here ...
ModalAI Forum (forum.modalai.com)
Thanks & Regards,
Mohammed Naveed@mohammednaveed said in QGC obstacle display bug?:
Hi @hmlow
I am facing the same issue as well!
Overlay of obstacle during collision prevention
Hi All I am trying out the VOA at moment, it works as intended! But i have this confusion when it comes to the obstacle overlay that shows on the GCS. Here ...
ModalAI Forum (forum.modalai.com)
Thanks & Regards,
Mohammed NaveedGood to know that im not alone!
Do you have the issue shown here as well?
https://forum.modalai.com/topic/176/what-is-for-avoidance-collision-prevention-error -
Hi, we have not actually used QGC to debug collision prevention ourselves.
The tools we use to debug collision prevention can be found on our docs here
If you find anything related to QGC integration, a follow-up would be appreciated!
@Chad-Sweet said in QGC obstacle display bug?:
Hi, we have not actually used QGC to debug collision prevention ourselves.
The tools we use to debug collision prevention can be found on our docs here
If you find anything related to QGC integration, a follow-up would be appreciated!
Thanks. Will probably report this to the QGC dev team as an issue

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login