Modal starling2 downward camera
-
I noticed that the tracking_down camera has an undocumented 90 degree rotation, where the image x is aligned with drone x(-x to be precise) even though the extrinsics only calls out a 180 yaw in the extrinsics.conf? Is this an erroneous extrinsics conf file or is this some standard drone convention I'm not aware of? Thanks!
-
I noticed that the tracking_down camera has an undocumented 90 degree rotation, where the image x is aligned with drone x(-x to be precise) even though the extrinsics only calls out a 180 yaw in the extrinsics.conf? Is this an erroneous extrinsics conf file or is this some standard drone convention I'm not aware of? Thanks!
I believe the extrinsics file is correct. Here is an extrinsics file for Starling 2 (which can support up to 3 tracking cameras, depending on configuration). https://gitlab.com/voxl-public/voxl-sdk/utilities/voxl-mpa-tools/-/blob/master/misc_files/usr/share/modalai/extrinsic_configs/D0014_Starling_2.conf
tracking_downis the camera we want and the extrinsics are:"parent": "imu_apps", "child": "tracking_down", "T_child_wrt_parent": [-0.08825, -0.0045, 0.0269], "RPY_parent_to_child": [0, 0, 180]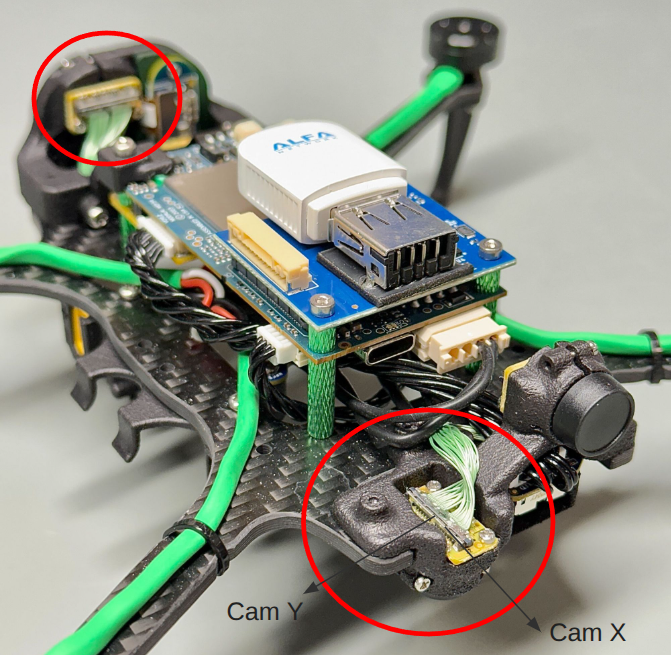
I have labeled the camera X and Y axes on the down-facing rear camera and the rotation matches up with 180 degree yaw with respect to the drone's body axes (X=forward, Y=right, Z= down)
Please note something that may add to the confusion. The front facing tracking camera is technically upside down (using our standard convention that i labeled for the down-facing camera), however we rotate the image 180 degrees in the camera itself during image read-out, so that the image looks right side up without any software work. This 180 degree rotation is selected in
voxl-camera-server.confwith a rotation parameter, which instructsvoxl-camera-serverto set a special register in the camera to reverse the image readout. This is why you will seetracking_frontandhirescameras having the same rotation extrinsics, while thetracking_frontcamera is physically upside down.Some more info about our extrinsics and conventions : https://docs.modalai.com/configure-extrinsics/
Alex
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login