Starling 2 max no odometry even with qvio enabled
-
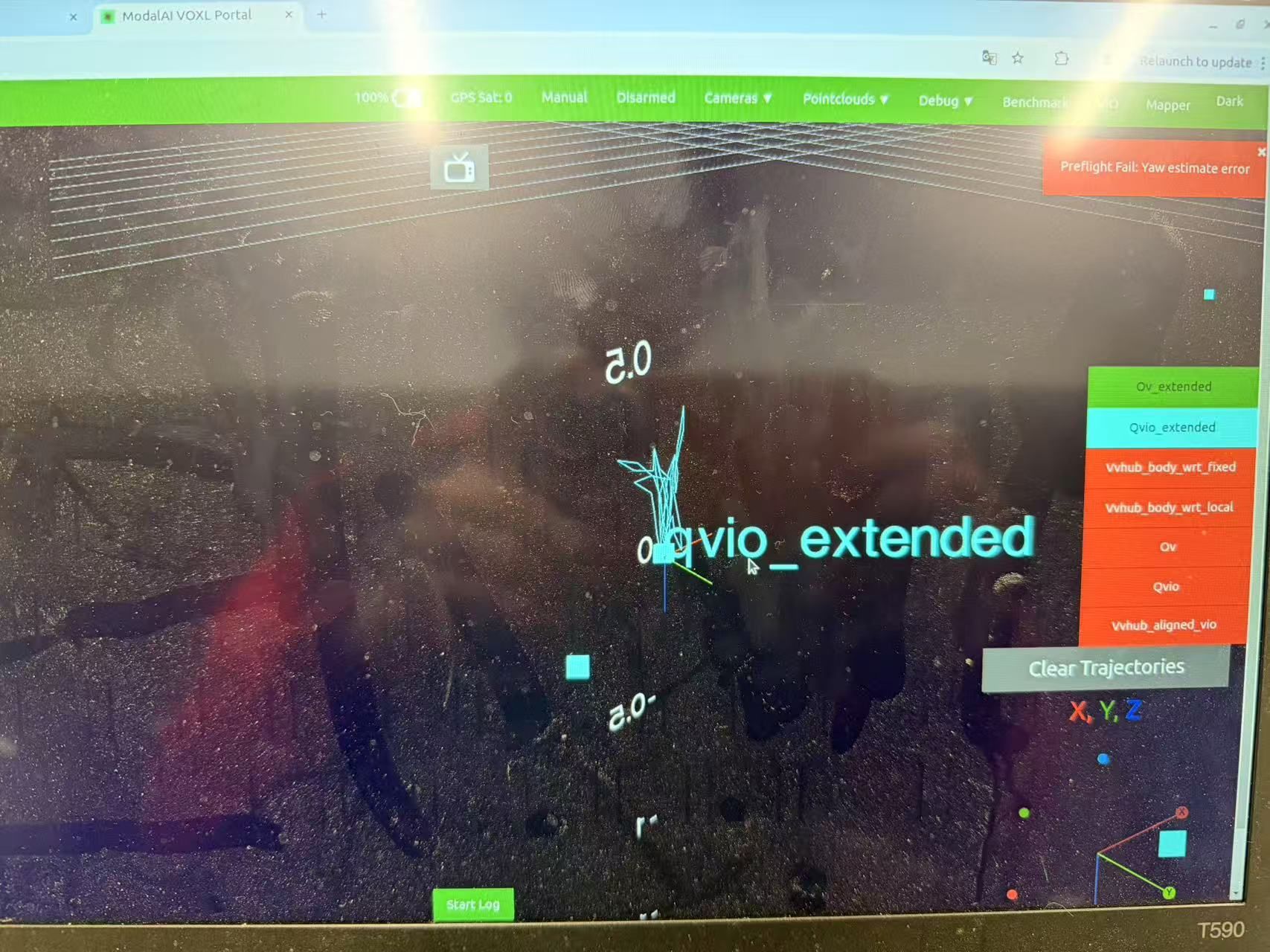
we have got a starling 2 max and enabled the qvio service. In GUI the qvio outputs good odometry:
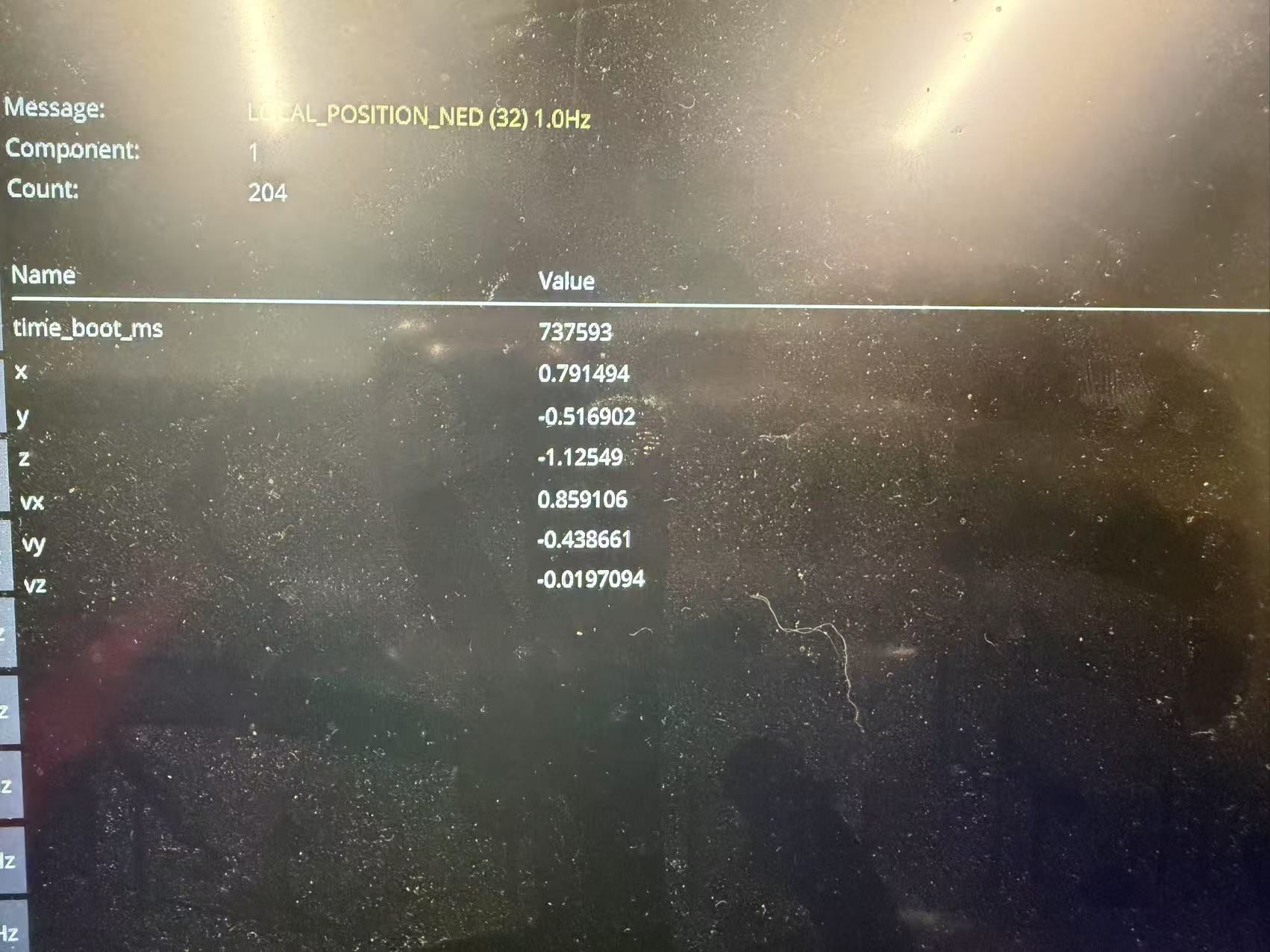
However, in px4 mavlink list, we cannot find the odometry mavlink message. And the local position estimate gives very high velocity even when the drone is static:
This is the list of qvio services running:

-
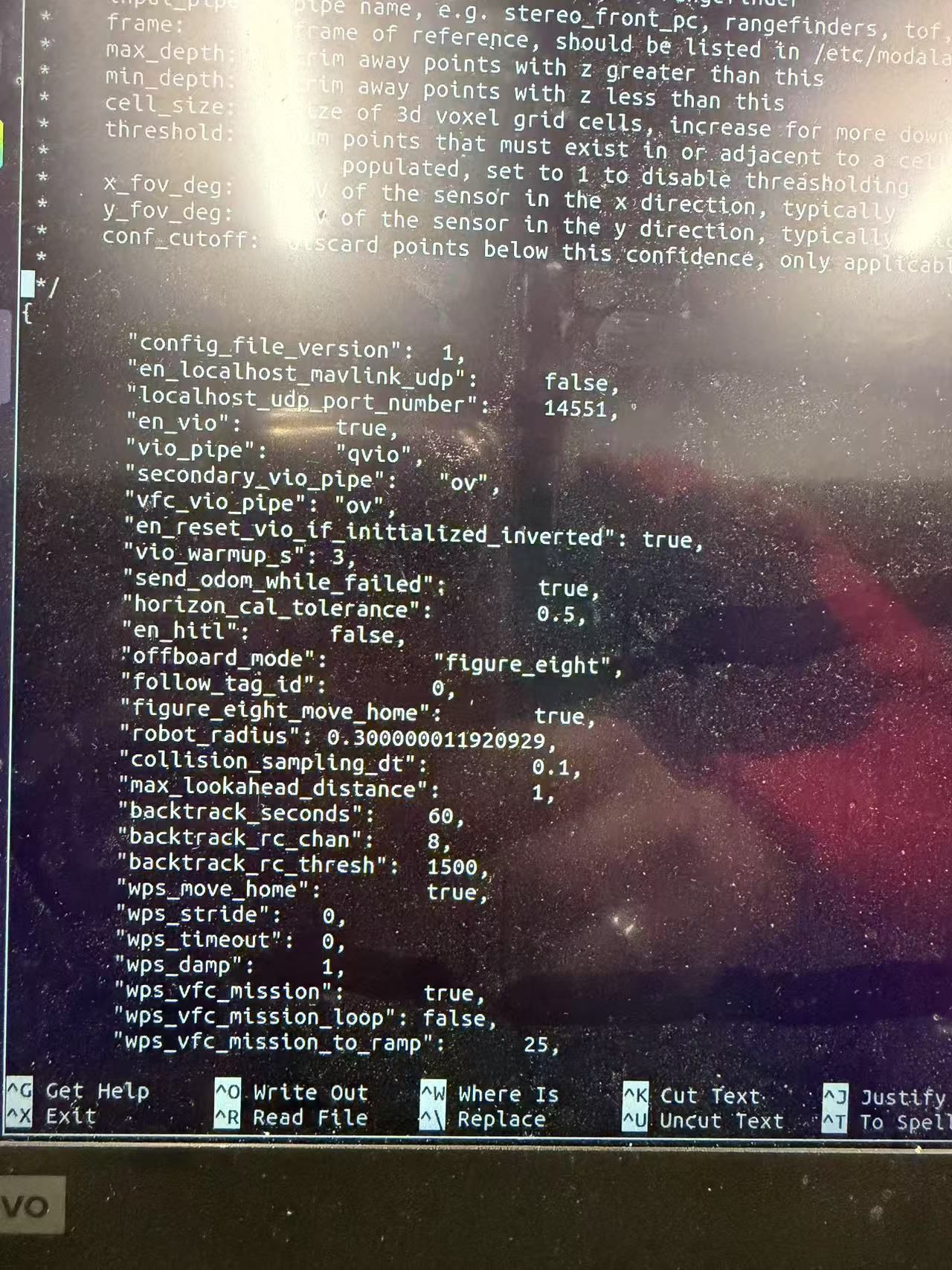
@Muqing-Cao In the voxl-vision-hub configuration file
/etc/modalai/voxl-vision-hub.confhow is the parameteren_vioset? -
@Eric-Katzfey
en_vio is set to true
-
@Eric-Katzfey any idea how to resolve this? we need to get the position mode flying soon. thanks.
-
@Muqing-Cao
Can you confirm your SDK version? -
@zauberflote1 it's 1.5.1
-
@Muqing-Cao you have voxl-open-vins-server and voxl-qvio-server running at the same time. Only one can be run - modalAI defaulted to open-vins as the main method for positioning - if you have both running, you are bound to run into conflicting errors.
-
@Zachary-Lowell-0 after turning off open-vins and rebooting it works. thanks!