Starling 2 flying into ceiling
-
Hello ModalAI Team,
I have a Starling 2 drone:
system-image: 1.8.02-M0054-14.1a-perf
kernel: #1 SMP PREEMPT Mon Mar 24 22:31:58 UTC 2025 4.19.125
hw platform: M0054
mach.var: 1.0.1
SKU: MRB-D0014-4-V1-C27-T8-M22-X0
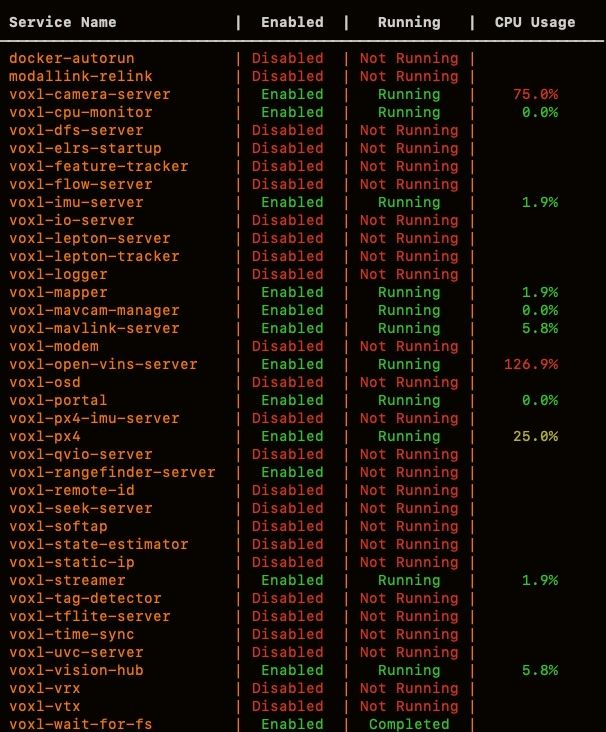
voxl-suite: 1.4.5Services:
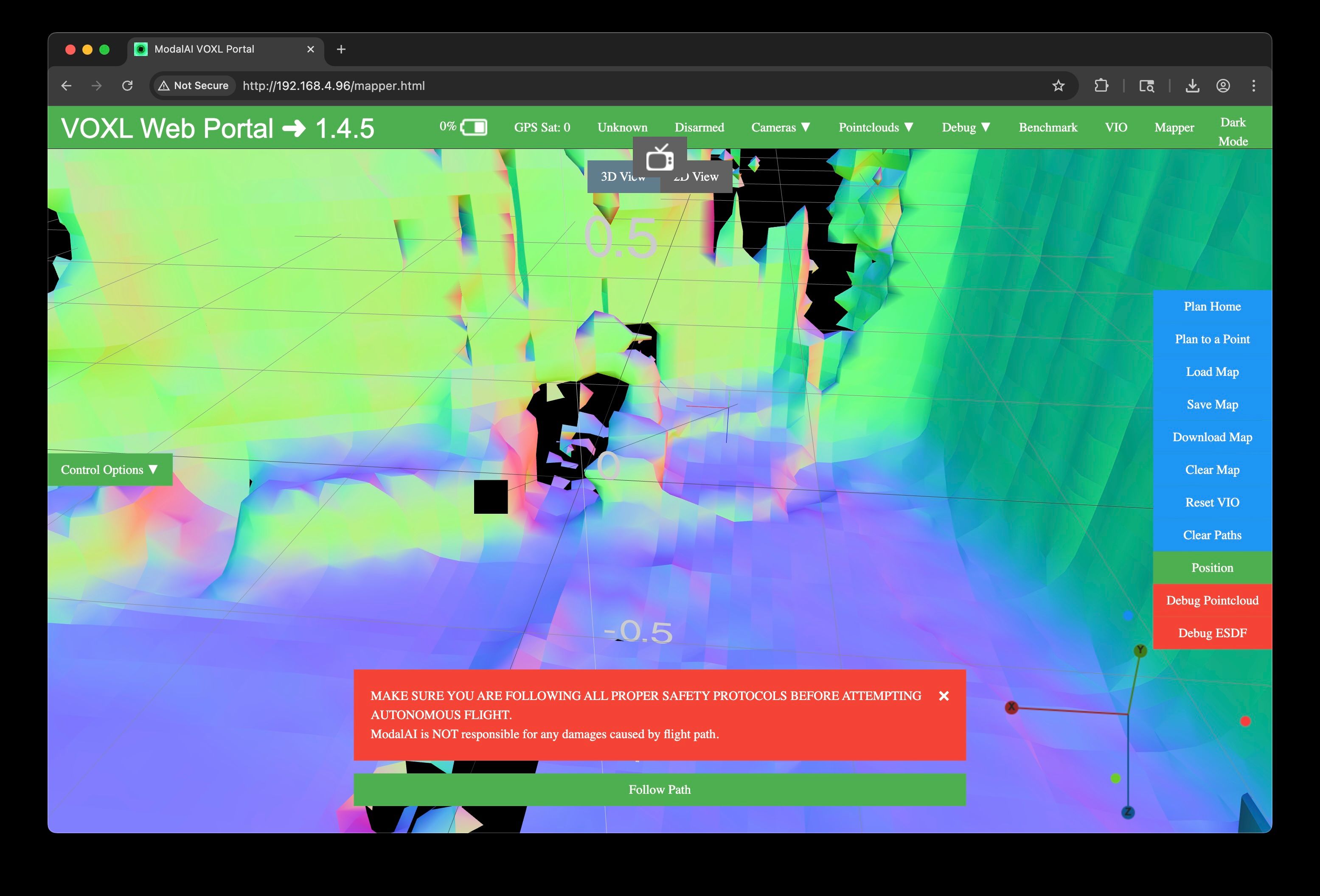
When using the navigation of the Mapper, after plotting a location like this short route with no obstacles:
The drone flies up into the ceiling. The position mode works well though it can drift upwards some. The drone can run the figure 8 without any issue. So far, I am not sure what the issue with the navigation once the Mapper create the route. It am afraid the drone with break itself or something else in the room. I can attempt to send videos of the fly if they would be helpful.
-
@tom Thank you for the assistance on the previous topic. Is there a best way to diagnosis the navigation? The path appears fine, but the drone few straight upward into the ceiling before falling and breaking one of main battery clips next to the LED board.
-
Hello. Just checking to see if there is any more data I can provide to help determine the issue. Is there some configuration that allows the drone to fly in the figure-8 without issue but not navigate within the map that has been generated?
-
Hello. Checking in again if assistance can be provided and/or if more information is needed.
@greg_s Hi there, can you post these 2 files from your drone:
/etc/modalai/voxl-vision-hub.conf /etc/modalai/voxl-open-vins-server.confOne thing from your screenshot is I sort of see the drone's position and the trajectory planned. For example as in this screenshot, the drone's xyz position should be visible (xyz axes) and a trajectory (black & red lines) should be displayed before executing a trajectory. The drone should be moving in realtime hovering in position. If it's static the vio was likely lost.
-
@greg_s Hi there, can you post these 2 files from your drone:
/etc/modalai/voxl-vision-hub.conf /etc/modalai/voxl-open-vins-server.confOne thing from your screenshot is I sort of see the drone's position and the trajectory planned. For example as in this screenshot, the drone's xyz position should be visible (xyz axes) and a trajectory (black & red lines) should be displayed before executing a trajectory. The drone should be moving in realtime hovering in position. If it's static the vio was likely lost.
Hello @Cliff-Wong,
Yes, I flew the drone around the room in position mode until the map was generated. I then flipped the remote to offboard with 'trajectory' set. Here are the files below:
/**
- VOXL Vision PX4 Configuration File
- version: don't touch this, used to keep track of changing config file formats
- ##############################################################################
-
MAVROS MAVSDK
- ##############################################################################
- en_localhost_mavlink_udp:
-
If you are running MAVROS/MAVSDK onboard VOXL and wish to open access to -
PX4 through a localhost UDP port simply ensure the follow feature is -
enabled. This is set to true by default. This will allow one local process -
to communicate with PX4 via port 14551 by default, NOT 14550 which is -
reserved for connections outside the board. These separation prevents -
conflicts between the two sockets. Both MAVROS and MAVSDK can be -
configured to use this port. - localhost_udp_port_number:
-
Port number for localhost UDP socket, default 14551 - ##############################################################################
-
VIO
- ##############################################################################
- en_vio:
-
Enable processing of VIO data from MPA to be sent to PX4 as mavlink -
odometry messages. Enabled by default. - vio_pipe:
-
Primary pipe to subscribe to for VIO data. Must be a standard libmodal-pipe -
vio_data_t type. Default is qvio. If no data is available on this pipe -
then voxl-vision-hub will subscribe to secondary_vio_pipe instead. - secondary_vio_pipe:
-
Secondary pipe to subscribe to for VIO data. Must be a standard libmodal-pipe -
vio_data_t type. Default is ov for openvins. If no data is available on this -
pipe then voxl-vision-hub will subscribe to the primary vio_pipe instead. -
Set to an empty string to disable. Default: ov - en_reset_vio_if_initialized_inverted:
-
For VIO algorithms like qVIO that can initialize in any orientation -
and output their estimate of the gravity vector, we suggest leaving -
this enabled to allow vvpx4 to automatically send the reset signal -
back to the VIO pipe if VIO was initialized upside-down or sufficiently -
off-level. Helpful if the user powers on a drone while carrying it to -
the flight area and VIO starts too early. - vio_warmup_s:
-
Wait this for this amount of time of having good VIO data before -
actually starting to send to PX4. This helps stop EKF2 getting -
confused if VIO flickers in and out while struggling to init. -
Set to 0 to disable the feature. - send_odom_while_failed:
-
On by default. Send Odometry messages to PX4 with a quality of -1 when -
VIO indicates a failure so EKF2 can start dead reckoning. -
This MAY need to be turned off with PX4 versions older than 1.14 -
since the quality metric was no implemented prior to PX4 1.14 - ##############################################################################
-
APQ8096-only Features
- ##############################################################################
- en_set_clock_from_gps:
-
Enable setting the VOXL system time to GPS time if no NTP server can be -
reached via network to set the time. - en_force_onboard_mav1_mode:
-
Force PX4 to use onboard mode for mavlink 1 channel which is the channel -
apq8096 (VOXL1) uses to communicate UART Mavlink with PX4. Not applicable -
to qrb5165-based platforms. Sets the MAV1_MODE PX4 param. - en_reset_px4_on_error:
-
Trigger a reboot of PX4 one some of PX4's unrecoverable errors, -
Not applicable to qrb5165 -
Yaw estimate error & High Accelerometer Bias and both detected - ##############################################################################
-
Misc Features
- ##############################################################################
- horizon_cal_tolerance:
-
Allowable standard deviation in roll/pitch values to consider the drone -
stable enough in flight to do a PX4 horizon calibration. Default is 0.45, -
you can increase this slightly if flying in a small indoor area or with -
a drone that does not hold still very well. -
See https://docs.modalai.com/calibrate-px4-horizon/ - en_hitl:
-
Enable Hardware In The Loop (HITL) testing extensions. Disabled by default. - ##############################################################################
-
offboard mode config
- ##############################################################################
- offboard_mode: The following are valid strings
-
off: VVPX4 will not send any offboard commands to PX4 -
figure_eight: Default value, VVPX4 commands PX4 to fly a figure 8 path -
follow_tag: Drone will follow an apriltag around. Very dangerous, not -
recommended for customer use, for ModalAI R&D only. -
trajectory: VVPX4 receives polynomial trajectories by pipe and commands -
PX4 to follow the trajectory path. Still in development. -
backtrack: Drone will replay, in reverse order, the last few seconds of it's -
position including yaw. This is useful when the drone loses -
the communication link and needs to get back to a place where -
it is able to regain the link. This mode will notice when the -
RC link goes away and sends a command to px4 to enter offboard mode. -
wps: read waypoints in local coordinate system - follow_tag_id:
-
Apriltag ID to follow in follow_tag mode - figure_eight_move_home:
-
Enable by default, resets the center of the figure 8 path to wherever -
the drone is when flipped into offboard mode. When disabled, the drone -
will quickly fly back to the XYZ point 0,0,-1.5 in VIO frame before -
starting the figure 8. Disabling this feature can be dangerous if VIO -
has drifted significantly. - wps_move_home:
-
Enable by default, resets the center of the wps path to wherever -
the drone is when flipped into offboard mode. When disabled, the drone -
will quickly fly back to the XYZ point 0,0,-1.5 in VIO frame before -
starting the figure 8. Disabling this feature can be dangerous if VIO -
has drifted significantly. - robot_radius:
-
Robot radius to use when checking collisions within the trajectory monitor. -
The trajectory monitor is only active when in trajectory mode - collision_sampling_dt:
-
The time step to sample along the polynomials by when checking for collisions -
in the collision monitor. - max_lookahead_distance:
-
Maximum distance to look along the trajectory. Sensor data further out can be -
unrealiable so keeping this value small reduces false positives - backtrack_seconds:
-
Number of seconds worth of position data to store for replay in backtrack mode. - backtrack_rc_chan:
-
RC channel to monitor for transitions into and out of backtrack mode. - backtrack_rc_thresh:
-
Value above which backtrack is considered enabled on the configured RC channel. - ##############################################################################
-
Fixed Frame Tag Relocalization
- ##############################################################################
- en_tag_fixed_frame:
-
Enable fixed frame relocalization via voa_inputs. -
See: https://docs.modalai.com/voxl-vision-px4-apriltag-relocalization/ - fixed_frame_filter_len:
-
Length of the moving average filter to use for smooth relocalization -
when a tag is detected. Default is 5, a longer filter will result in -
smoother behavior when a new tag comes into view. Set to 1 to do no -
filtering at all and assume every tag detection is accurate. - en_transform_mavlink_pos_setpoints_from_fixed_frame:
-
When enabled, mavlink position_target_local_ned_t commands received on -
via UDP will be assumed to be in fixed frame and are then transformed -
to local frame before being sent to PX4. This allows offboard mode -
position commands from MAVROS/MAVSDK to be in fixed frame relative to -
voa_inputs even though PX4/EKF2 operates in local frame relative to where -
VIO initialized. - ##############################################################################
-
Collision Prevention (VOA)
-
Settings for configuring Mavlink data sent to Autopilot for VOA
- ##############################################################################
- en_voa:
-
Enable processing of DFS and TOF data to be sent to PX4 as mavlink -
obstacle_distance messages for collision prevention in position mode. - voa_lower_bound_m & voa_upper_bound_m:
-
VOA ignores obstacles above and below the upper and lower bounds. -
Remember, Z points downwards in body and NED frames, so the lower bound -
is a positive number, and the upper bound is a negative number. -
Defaults are lower: 0.15 upper: -0.15 Units are in meters. - voa_memory_s:
-
number of seconds to keep track of sensor readings for VOA -
default: 1.0 - voa_max_pc_per_fusion:
-
maximum number of sensor samples (points clouds) to fuse for every -
mavlink transmision. Default is 100 so that voa_memory_s determines -
when to discard old data instead. set this to 1 if you only want to use -
the most recent sensor sample for example. If you start severly limiting -
the number of point clouds used per fusion, you will also need to lower -
voa_pie_threshold. - voa_pie_min_dist_m:
-
minimum distance from the drone's center of mass to consider a sensor -
sample a valid point for mavlink transmission. - voa_pie_max_dist_m:
-
minimum distance from the drone's center of mass to consider a sensor -
sample a valid point for mavlink transmission. Note this is and can be -
different from the individual sensor limits. - voa_pie_under_trim_m:
-
VOA discards points in a bubble under the drone with this radius. -
default 1.0. This helps the drone approach an obstacle, stop -
ascend, and continue forward smoothly over the top. - voa_pie_threshold:
-
Minimum number of points that must appear in and adjacent to a pie -
segment to consider it populated. Default 3 - voa_send_rate_hz:
-
Rate to send VOA mavlink data to autopilot. Independent from the -
sensor input rates. Default 20 - voa_pie_slices:
-
number of slices to divide the 360 degree span around the drone into. -
default 36 (10 degree slices) - voa_pie_bin_depth_m:
-
Radial depth of each bin during the pie binning step. Default 0.15 - ##############################################################################
-
Collision Prevention (VOA) Input Configuration
-
Settings for configuring pipe data sources for VOA
- ##############################################################################
- voa_inputs:
-
Array of pipes to subscribe to for use with VOA, up to 10 supported -
Each entry has 4 fields: - Fields:
- enabled: true or false, it's safe to leave this enabled when the pipe is missing
- type: can be point_cloud, tof, or rangefinder
- input_pipe: pipe name, e.g. stereo_front_pc, rangefinders, tof, etc
- frame: frame of reference, should be listed in /etc/modalai/extrinsics/conf
- max_depth: trim away points with z greater than this
- min_depth: trim away points with z less than this
- cell_size: size of 3d voxel grid cells, increase for more downsampling
- threshold: num points that must exist in or adjacent to a cell to consider it
-
populated, set to 1 to disable threasholding - x_fov_deg: FOV of the sensor in the x direction, typically width
- y_fov_deg: FOV of the sensor in the y direction, typically height
- conf_cutoff: discard points below this confidence, only applicable to TOF
*/
{
"config_file_version": 1,
"en_localhost_mavlink_udp": false,
"localhost_udp_port_number": 14551,
"en_vio": true,
"vio_pipe": "qvio",
"secondary_vio_pipe": "ov",
"vfc_vio_pipe": "ov",
"en_reset_vio_if_initialized_inverted": true,
"vio_warmup_s": 3,
"send_odom_while_failed": true,
"horizon_cal_tolerance": 0.5,
"en_hitl": false,
"offboard_mode": "trajectory",
"follow_tag_id": 0,
"figure_eight_move_home": true,
"robot_radius": 0.300000011920929,
"collision_sampling_dt": 0.1,
"max_lookahead_distance": 1,
"backtrack_seconds": 60,
"backtrack_rc_chan": 8,
"backtrack_rc_thresh": 1500,
"wps_move_home": true,
"wps_stride": 0,
"wps_timeout": 0,
"wps_damp": 1,
"wps_vfc_mission": true,
"wps_vfc_mission_loop": false,
"wps_vfc_mission_to_ramp": 25,
"wps_vfc_mission_to_kp": 0.10000000149011612,
"wps_vfc_mission_cruise_speed": 1,
"en_tag_fixed_frame": false,
"fixed_frame_filter_len": 5,
"en_transform_mavlink_pos_setpoints_from_fixed_frame": false,
"vfc_rate": 100,
"vfc_rc_chan_min": 980,
"vfc_rc_chan_max": 2020,
"vfc_thrust_ch": 3,
"vfc_roll_ch": 1,
"vfc_pitch_ch": 2,
"vfc_yaw_ch": 4,
"vfc_submode_ch": 6,
"vfc_alt_mode_rc_min": 0,
"vfc_alt_mode_rc_max": 0,
"vfc_flow_mode_rc_min": 0,
"vfc_flow_mode_rc_max": 0,
"vfc_hybrid_flow_mode_rc_min": 0,
"vfc_hybrid_flow_mode_rc_max": 0,
"vfc_position_mode_rc_min": 0,
"vfc_position_mode_rc_max": 2100,
"vfc_traj_mode_rc_min": 0,
"vfc_traj_mode_rc_max": 0,
"vfc_yaw_deadband": 30,
"vfc_vxy_deadband": 50,
"vfc_vz_deadband": 150,
"vfc_min_thrust": 0,
"vfc_max_thrust": 0.800000011920929,
"vfc_tilt_max": 0.43599998950958252,
"vfc_yaw_rate_max": 3,
"vfc_thrust_hover": 0.5,
"vfc_vz_max": 1,
"vfc_kp_z": 5.2899999618530273,
"vfc_kd_z": 5.9800000190734863,
"vfc_vxy_max": 3,
"vfc_kp_xy": 0.63999998569488525,
"vfc_kd_xy": 2.559999942779541,
"vfc_kp_z_vio": 5.2899999618530273,
"vfc_kd_z_vio": 5.9800000190734863,
"vfc_kp_xy_vio": 3.2400000095367432,
"vfc_kd_xy_vio": 3.9600000381469727,
"vfc_w_filt_xy_vio": 10,
"vfc_w_filt_xy_flow": 3,
"vfc_vel_ff_factor_vio": 0.899999976158142,
"vfc_xy_acc_limit_vio": 2.5,
"vfc_max_z_delta": 3,
"vfc_att_transition_time": 0.5,
"vfc_stick_move_threshold": 30,
"vfc_flow_transition_time": 1,
"vfc_q_min": 10,
"vfc_points_min": 7,
"vfc_en_submode_announcement": 1,
"vfc_disable_fallback": false,
"vfc_traj_csv": "/data/voxl-vision-hub/traj.csv",
"en_voa": true,
"voa_upper_bound_m": -0.15000000596046448,
"voa_lower_bound_m": 0.15000000596046448,
"voa_voa_memory_s": 1,
"voa_max_pc_per_fusion": 100,
"voa_pie_max_dist_m": 20,
"voa_pie_min_dist_m": 0.25,
"voa_pie_under_trim_m": 1,
"voa_pie_threshold": 3,
"voa_send_rate_hz": 20,
"voa_pie_slices": 36,
"voa_pie_bin_depth_m": 0.15000000596046448,
"voa_inputs": [{
"enabled": true,
"type": "point_cloud",
"input_pipe": "dfs_point_cloud",
"frame": "stereo_l",
"max_depth": 8,
"min_depth": 0.300000011920929,
"cell_size": 0.079999998211860657,
"threshold": 4,
"x_fov_deg": 68,
"y_fov_deg": 56,
"conf_cutoff": 0
}, {
"enabled": true,
"type": "point_cloud",
"input_pipe": "stereo_front_pc",
"frame": "stereo_front_l",
"max_depth": 8,
"min_depth": 0.300000011920929,
"cell_size": 0.079999998211860657,
"threshold": 4,
"x_fov_deg": 68,
"y_fov_deg": 56,
"conf_cutoff": 0
}, {
"enabled": true,
"type": "point_cloud",
"input_pipe": "stereo_rear_pc",
"frame": "stereo_rear_l",
"max_depth": 8,
"min_depth": 0.300000011920929,
"cell_size": 0.079999998211860657,
"threshold": 4,
"x_fov_deg": 68,
"y_fov_deg": 56,
"conf_cutoff": 0
}, {
"enabled": true,
"type": "tof",
"input_pipe": "tof",
"frame": "tof",
"max_depth": 6,
"min_depth": 0.15000000596046448,
"cell_size": 0.079999998211860657,
"threshold": 3,
"x_fov_deg": 106.5,
"y_fov_deg": 85.0999984741211,
"conf_cutoff": 125
}, {
"enabled": true,
"type": "rangefinder",
"input_pipe": "rangefinders",
"frame": "body",
"max_depth": 8,
"min_depth": 0.300000011920929,
"cell_size": 0.079999998211860657,
"threshold": 4,
"x_fov_deg": 68,
"y_fov_deg": 56,
"conf_cutoff": 0
}]
}
/**
-
This file contains configuration that's specific to voxl-open-vins-server.
-
NOTE: all time variables are measured in seconds
-
OpenVins param breakdown:
-
do_fej: whether or not to do first estimate Jacobians
-
imu_avg: whether or not use imu message averaging
-
use_rk4_integration: if we should use Rk4 imu integration.
-
cam_to_imu_refinement: whether or not to refine the imu-to-camera pose
-
cam_intrins_refinement: whether or not to refine camera intrinsics
-
cam_imu_ts_refinement: whether or not to calibrate cam to IMU time offset
-
max_clone_size: max clone size of sliding window
-
max_slam_features: max number of estimated SLAM features
-
max_slam_in_update: max number of SLAM features in a single EKF update
-
max_msckf_in_update: max number of MSCKF features used at an image timestep
-
Feature Reps can be any of the following:
-
0 - GLOBAL_3D
-
1 - GLOBAL_FULL_INVERSE_DEPTH
-
2 - ANCHORED_3D
-
3 - ANCHORED_FULL_INVERSE_DEPTH
-
4 - ANCHORED_MSCKF_INVERSE_DEPTH
-
5 - ANCHORED_INVERSE_DEPTH_SINGLE
-
feat_rep_msckf: (int) what representation our msckf features are in
-
feat_rep_slam: (int) what representation our slam features are in
-
cam_imu_time_offset: time offset between camera and IMU
-
slam_delay: delay that we should wait from init before estimating SLAM features
-
gravity_mag: gravity magnitude in the global frame
-
init_window_time: amount of time to initialize over
-
init_imu_thresh: variance threshold on our accel to be classified as moving
-
imu_sigma_w: gyroscope white noise (rad/s/sqrt(hz))
-
imu_sigma_wb: gyroscope random walk (rad/s^2/sqrt(hz))
-
imu_sigma_a: accelerometer white noise (m/s^2/sqrt(hz))
-
imu_sigma_ab: accelerometer random walk (m/s^3/sqrt(hz))
-
imu_sigma_w_2: gyroscope white noise covariance
-
imu_sigma_wb_2: gyroscope random walk covariance
-
imu_sigma_a_2: accelerometer white noise covariance
-
imu_sigma_ab_2: accelerometer random walk covariance
-
****_chi2_multiplier: what chi-squared multipler we should apply
-
****_sigma_px: noise sigma for our raw pixel measurements
-
****_sigma_px_sq: covariance for our raw pixel measurements
-
use_stereo: if feed_measurement_camera is called with more than one
-
image, this determines behavior. if true, they are treated as a stereo
-
pair, otherwise treated as binocular system
-
if you enable a camera with stereo in the name, this will be set to true
-
automatically
-
try_zupt: if we should try to use zero velocity update
-
zupt_max_velocity: max velocity we will consider to try to do a zupt
-
zupt_only_at_beginning: if we should only use the zupt at the very beginning
-
zupt_noise_multiplier: multiplier of our zupt measurement IMU noise matrix
-
zupt_max_disparity: max disparity we will consider to try to do a zupt
-
NOTE: set zupt_max_disparity to 0 for only imu based zupt, and
-
zupt_chi2_multipler to 0 for only display based zupt
-
num_pts: number of points we should extract and track in each image frame
-
fast_threshold: fast extraction threshold
-
grid_x: number of column-wise grids to do feature extraction in
-
grid_y: number of row-wise grids to do feature extraction in
-
min_px_dist: after doing KLT track will remove any features closer than this
-
knn_ratio: KNN ration between top two descriptor matchers for good match
-
downsample_cams: will half image resolution
-
use_nultithreading: if we should use multi-threading for stereo matching
-
use_mask: if we should load a mask and use it to reject invalid features
*/
{
"en_auto_reset": true,
"auto_reset_max_velocity": 20,
"auto_reset_max_v_cov_instant": 0.10000000149011612,
"auto_reset_max_v_cov": 0.10000000149011612,
"auto_reset_max_v_cov_timeout_s": 0.5,
"auto_reset_min_features": 1,
"auto_reset_min_feature_timeout_s": 3,
"auto_fallback_timeout_s": 3,
"auto_fallback_min_v": 0.600000023841858,
"en_cont_yaw_checks": false,
"fast_yaw_thresh": 5,
"fast_yaw_timeout_s": 1.75,
"do_fej": true,
"imu_avg": true,
"use_rk4_integration": true,
"cam_to_imu_refinement": true,
"cam_intrins_refinement": true,
"cam_imu_ts_refinement": true,
"max_clone_size": 8,
"max_slam_features": 35,
"max_slam_in_update": 10,
"max_msckf_in_update": 10,
"feat_rep_msckf": 4,
"feat_rep_slam": 4,
"cam_imu_time_offset": 0,
"slam_delay": 1,
"gravity_mag": 9.80665,
"init_window_time": 1,
"init_imu_thresh": 1,
"imu_sigma_w": 0.00013990944749616306,
"imu_sigma_wb": 4.1189724174615527e-07,
"imu_sigma_a": 0.0038947538150776763,
"imu_sigma_ab": 5.538346201712153e-05,
"msckf_chi2_multiplier": 1,
"slam_chi2_multiplier": 40,
"zupt_chi2_multiplier": 1,
"refine_features": true,
"pyr_levels": 6,
"grid_x": 5,
"grid_y": 5,
"msckf_sigma_px": 1,
"slam_sigma_px": 1.8,
"zupt_sigma_px": 1,
"try_zupt": true,
"zupt_max_velocity": 0.03,
"zupt_only_at_beginning": true,
"zupt_noise_multiplier": 1,
"zupt_max_disparity": 8,
"init_dyn_use": false,
"triangulate_1d": false,
"max_runs": 5,
"init_lamda": 0.001,
"max_lamda": 10000000000,
"min_dx": 1e-06,
"min_dcost": 1e-06,
"lam_mult": 10,
"min_dist": 0.1,
"max_dist": 60,
"max_baseline": 40,
"max_cond_number": 600000,
"use_mask": false,
"use_stereo": false,
"use_baro": false,
"num_opencv_threads": 4,
"fast_threshold": 15,
"histogram_method": 1,
"knn_ratio": 0.7,
"takeoff_accel_threshold": 0.5,
"takeoff_threshold": -0.1,
"use_stats": false,
"max_allowable_cep": 1,
"en_force_init": false,
"en_force_ned_2_flu": false,
"en_imu_frame_output": false,
"track_frequency": 15,
"publish_frequency": 5,
"en_vio_always_on": true,
"en_ext_feature_tracker": false,
"en_gpu_for_tracking": true,
"num_features_to_track": 20,
"raansac_gn": false,
"raansac_tri": true,
"en_thermal_enhance": false,
"en_overlay_landscape": false,
"thermal_brightness": 1,
"thermal_brightness_bos": 1
}
-
Hi there, looking at the files and review our analytics here since you were flying fine in position mode that says VIO was likely ok (as per you config files).
We did have a some changes between vision-hub and px4 that make have been incompatible with the 1.4.5 version. Hence you have 2 options:
option 1: debug & confirm either probem lies in voxl-vision-hub or PX4.
(a) you need to ssh onto the vehicle, in the remote terminal, run:
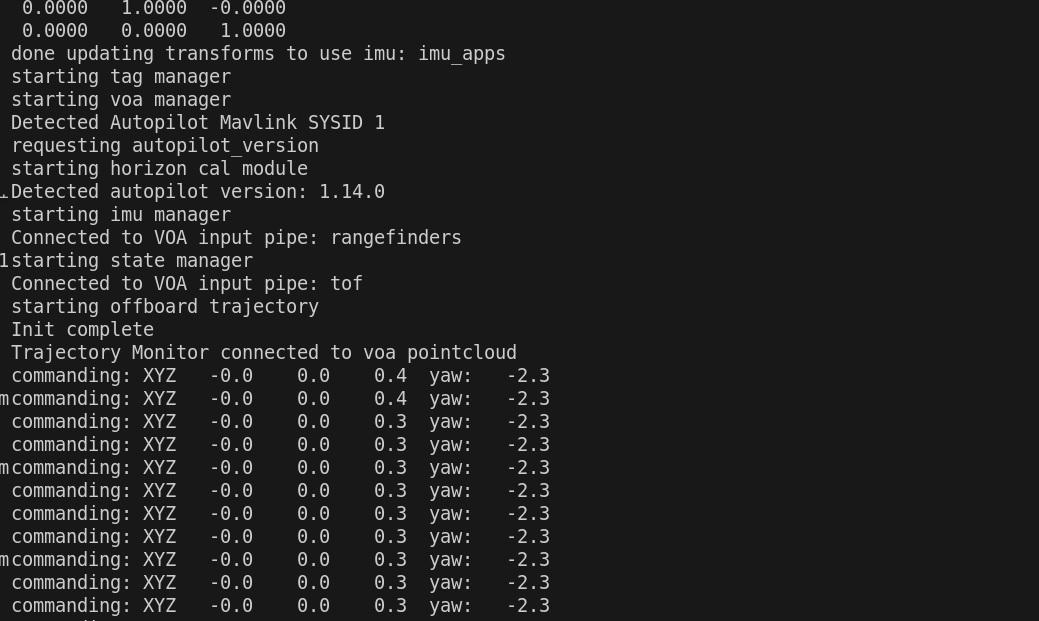
voxl-vision-hub --debug_offboardThat will display streaming position data, which is the traj commands to PX4. Then you may restart/start voxl-mapper (e.g.
systemctl restart voxl-mapper). In the vision-hub streaming output, you'll see a print out likeTrajectory Monitor connected to voa pointcloud.(b) you can now switch to position mode, fly around in that mode to map as normal, then stop to hover. Draw your simple trajectory in portal and execute. Ensure the draw trajectory is within the space using the mouse and rotating around the area--portal can sometimes make the 'plan point' appear close to the drone, but it is actually very far away so you need to check at different viewing angles. When you execute the plan, the streaming output in the vision-hub display above should reflect the drawn trajectory. In both your example and mine, the Z position output should stay relatively close to the current. If it rises, we have a trajectory calculation problem (drone is doing what it's told). If it rises while the position data is fairly minimal, then PX4 likely has failed (VIO or dropped out of offboard mode). Please try this and report back. We suspect VIO may have failed. Here's a example of the output:
-
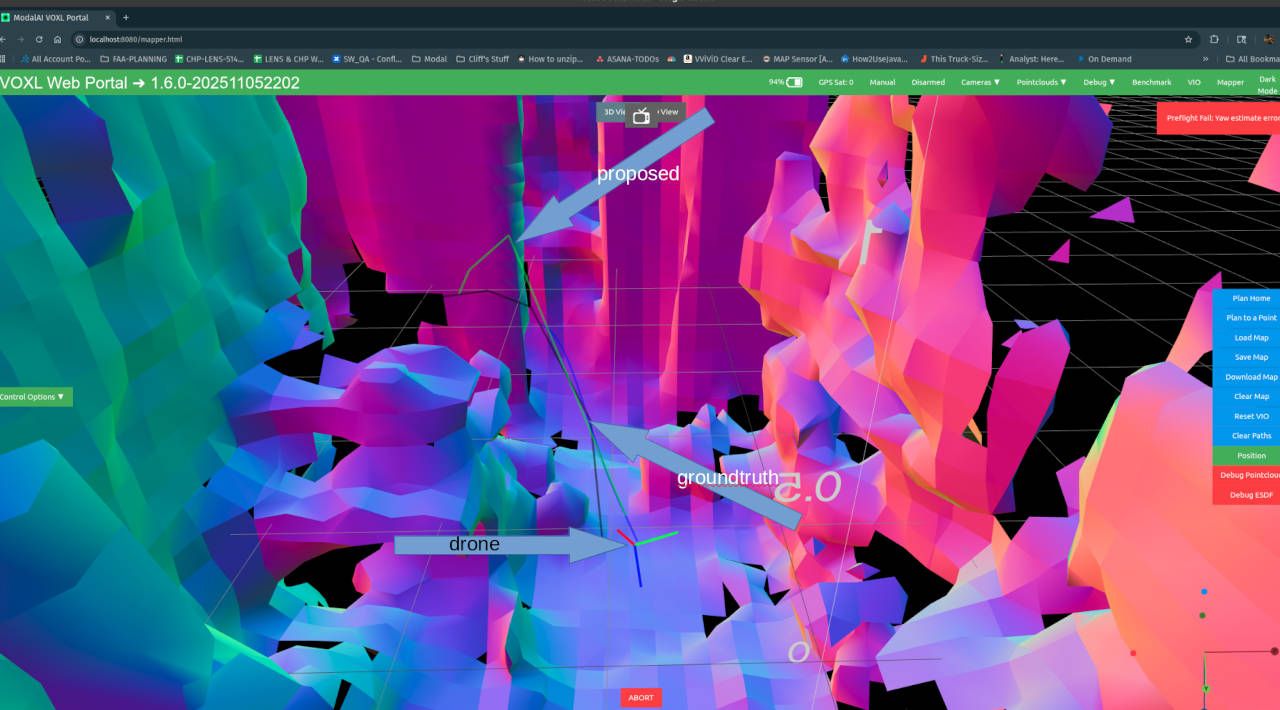
option 2: upgrade to SDK 1.6 as we have a new version of VIO and numerous bug fixes
Directions are found here. where the SDK for starling 2 is found here.
-
option 2: upgrade to SDK 1.6 as we have a new version of VIO and numerous bug fixes
Directions are found here. where the SDK for starling 2 is found here.
@Cliff-Wong Thanks! I will try this as soon as possible and report how it works out.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login