Seeker failing to take off after several successful flights
-
I have had several successful flights with our Seeker. No hardware or software changes.
Last several attempts (spaced out over a week) have failed. The front left landing gear never leaves the ground. When the throttle is pushed to 75% in manual mode the Seeker will start to spin in circles around the front left motor.
I have pulled PX4 ULG logs and plotted them with PlotJuggler.
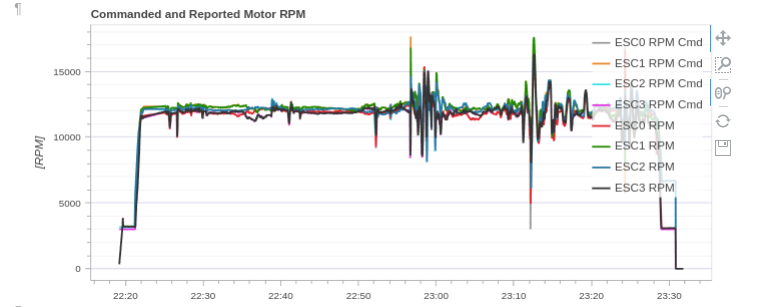
Motor actuator and ESC RPMs show that 1 motor (or ESC) spins up almost none. I can upload this data, but I dont seem to be able to attach to this post.I can buy a replacement motor from GetFpv. I assume I would need a quote for a Modal AI ESC?
-
I have had several successful flights with our Seeker. No hardware or software changes.
Last several attempts (spaced out over a week) have failed. The front left landing gear never leaves the ground. When the throttle is pushed to 75% in manual mode the Seeker will start to spin in circles around the front left motor.
I have pulled PX4 ULG logs and plotted them with PlotJuggler.
Motor actuator and ESC RPMs show that 1 motor (or ESC) spins up almost none. I can upload this data, but I dont seem to be able to attach to this post.I can buy a replacement motor from GetFpv. I assume I would need a quote for a Modal AI ESC?
Hi @Cody , is it the case that the commanded RPM is relatively high, but motor just does not spin up? Did you confirm that from the logs?
We have a fork of
px4-flight-review, which you can run on your linux pc locally https://github.com/modalai/px4-flight-review . There is aQuickstart Guidethat should get you up and running in a few steps (Dockeris required) - https://github.com/modalai/px4-flight-review?tab=readme-ov-file#quickstart-guideThis has support for our custom data logs, including commanded and actual motor RPMs, which is useful for debugging. Can you send a plot of RPMs from the flight review app?
You should have a plot like this, maybe zoomed in on areas of interest.
Alex
-
Hi @Cody , is it the case that the commanded RPM is relatively high, but motor just does not spin up? Did you confirm that from the logs?
We have a fork of
px4-flight-review, which you can run on your linux pc locally https://github.com/modalai/px4-flight-review . There is aQuickstart Guidethat should get you up and running in a few steps (Dockeris required) - https://github.com/modalai/px4-flight-review?tab=readme-ov-file#quickstart-guideThis has support for our custom data logs, including commanded and actual motor RPMs, which is useful for debugging. Can you send a plot of RPMs from the flight review app?
You should have a plot like this, maybe zoomed in on areas of interest.
Alex
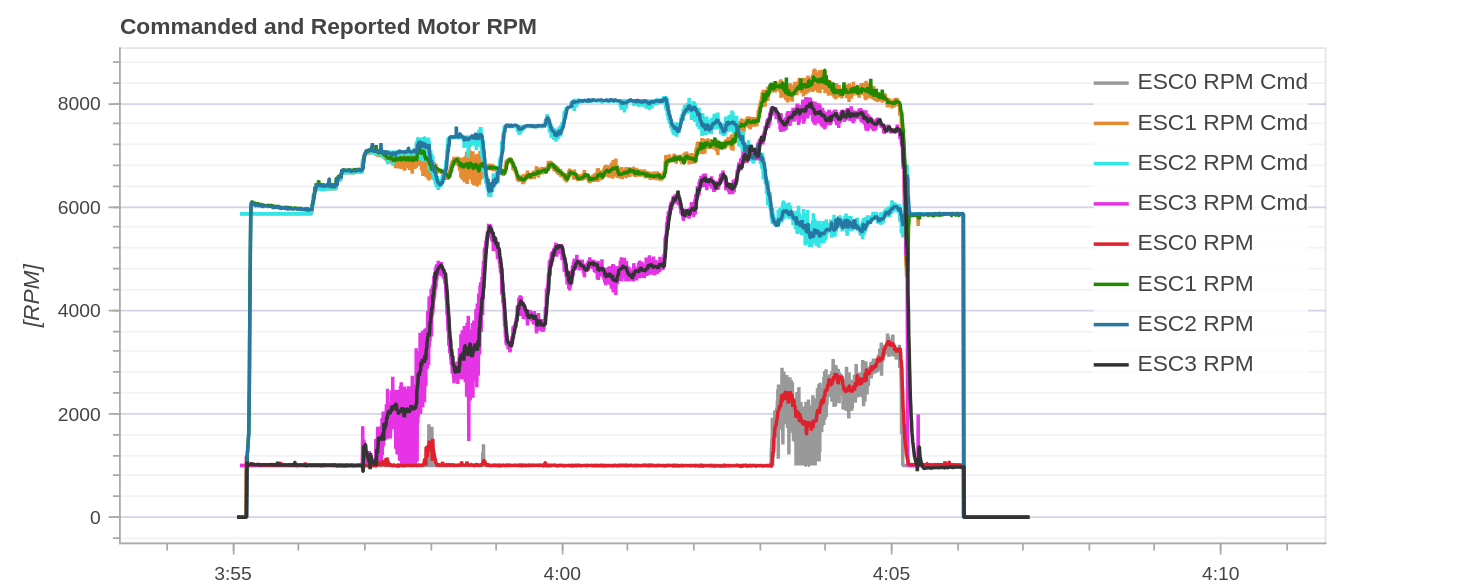
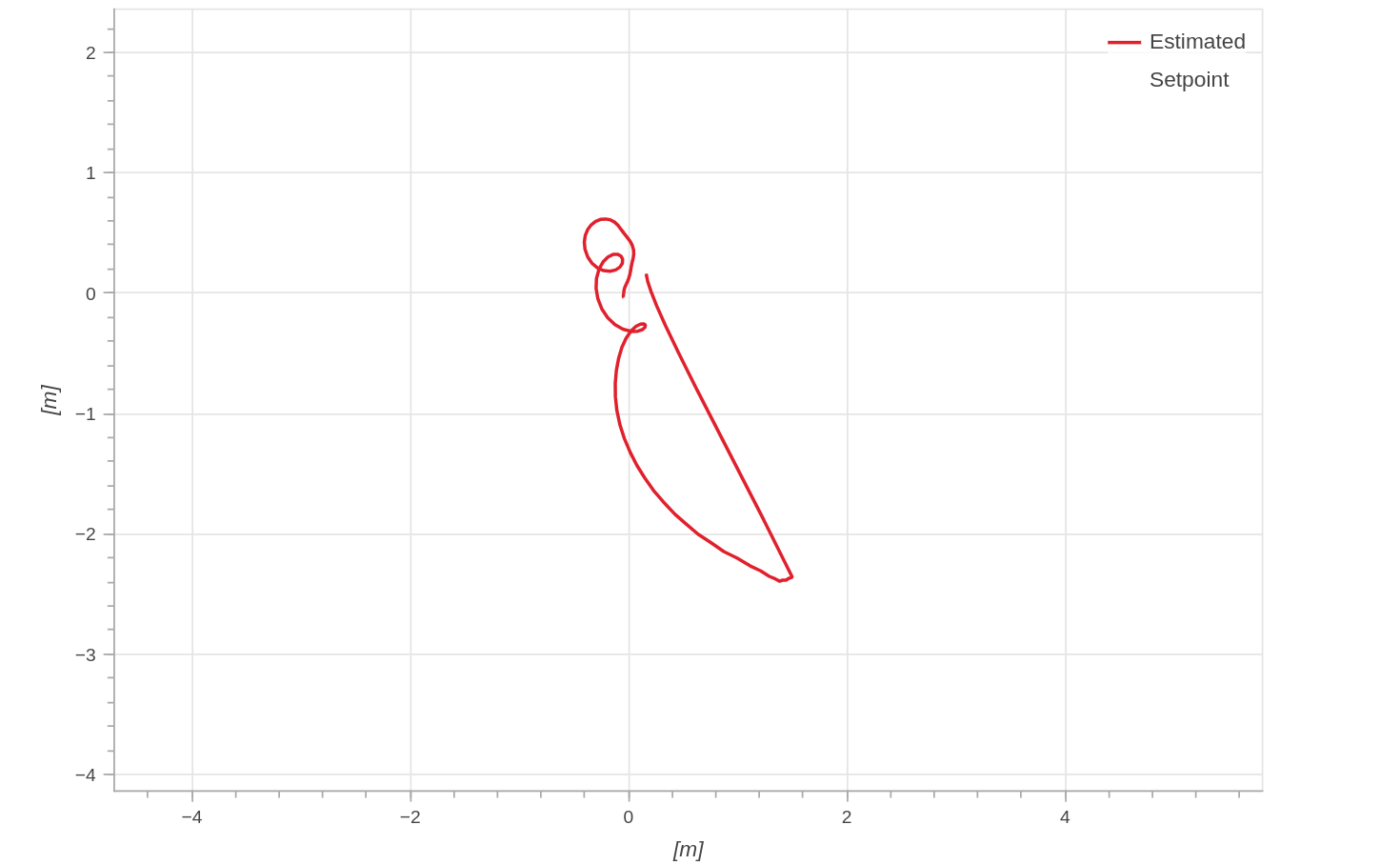
I have attached several plots from flight review. It has more plot able variables than PlotJuggler.
It does not seem that the RPMs are being commanded very high, which is confusing.
The X Y Z set points and estimates are far off though.Thoughts?
-
Hi @Cody , is it the case that the commanded RPM is relatively high, but motor just does not spin up? Did you confirm that from the logs?
We have a fork of
px4-flight-review, which you can run on your linux pc locally https://github.com/modalai/px4-flight-review . There is aQuickstart Guidethat should get you up and running in a few steps (Dockeris required) - https://github.com/modalai/px4-flight-review?tab=readme-ov-file#quickstart-guideThis has support for our custom data logs, including commanded and actual motor RPMs, which is useful for debugging. Can you send a plot of RPMs from the flight review app?
You should have a plot like this, maybe zoomed in on areas of interest.
Alex
-
@Alex-Kushleyev
One of my colleges tested the Seeker again. He managed to have a smooth take off, but shortly after it begin to drift to the left very hard making landing very difficult. The flight was at most several seconds long.@Cody , Are you trying to fly in position control mode? if so, please try flying in manual mode (thrust, roll, pitch, yaw) and see if the vehicle is behaving normally.
From your ESC plots, it does seem like one ESC (red/gray) is commanded very low RPM, which means a higher level controller is sending commands that are different from just hover in place.
Alex
-
@Cody , Are you trying to fly in position control mode? if so, please try flying in manual mode (thrust, roll, pitch, yaw) and see if the vehicle is behaving normally.
From your ESC plots, it does seem like one ESC (red/gray) is commanded very low RPM, which means a higher level controller is sending commands that are different from just hover in place.
Alex
@Alex-Kushleyev All indoor flights have been done in manual mode. Several of the above plots also show manual mode.
Most outdoor flights have been done in position mode, but both position and manual flights have recently been attempted unsuccessfully outdoors.
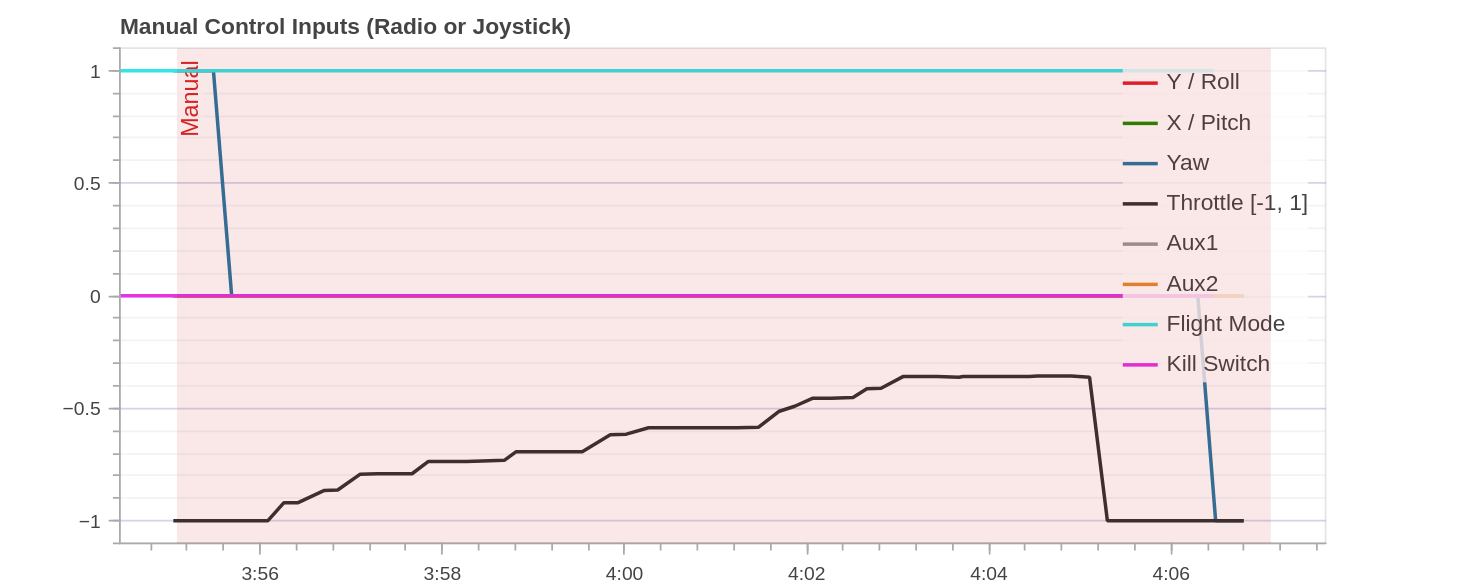
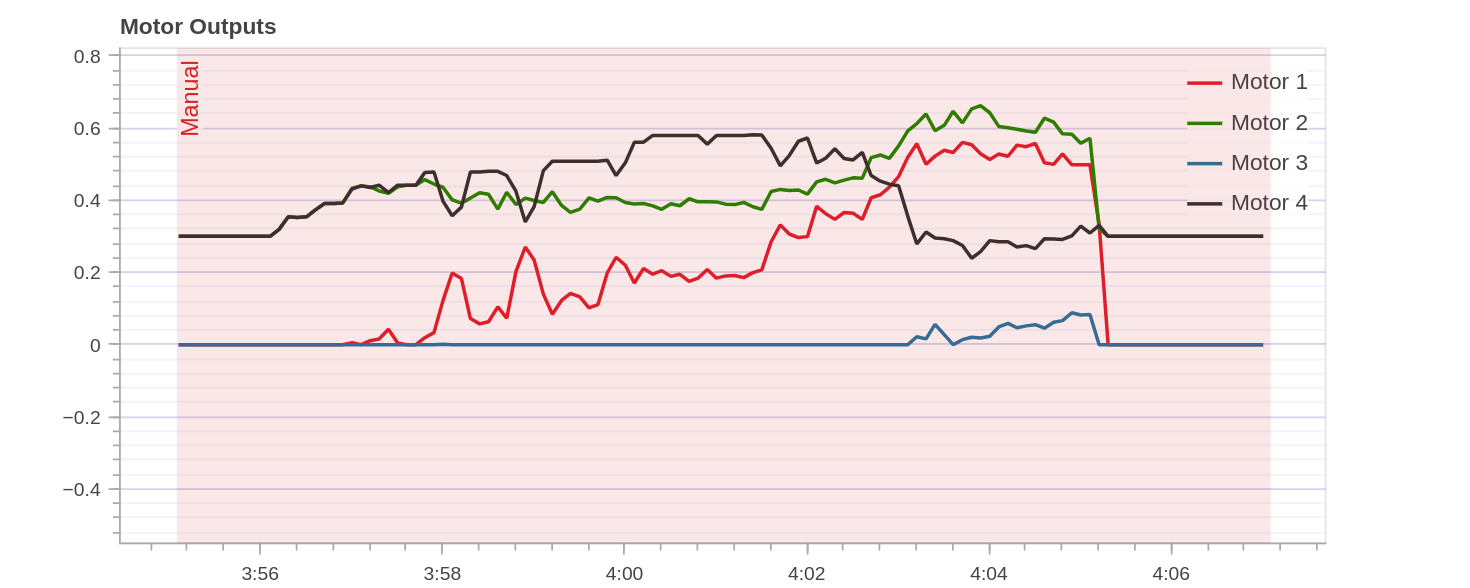
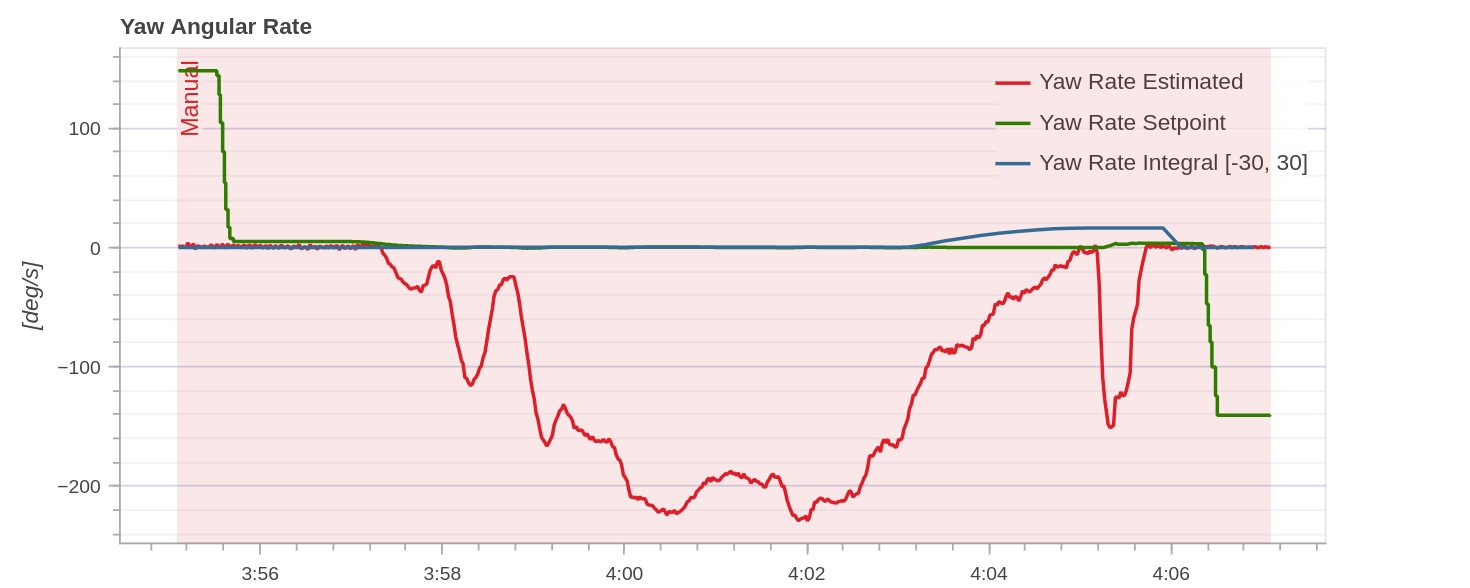
In the plots, you can see the RC commands include no yaw or roll commands, only throttle increase. I cannot find any reason that the ESC signal is so low? -
@Alex-Kushleyev All indoor flights have been done in manual mode. Several of the above plots also show manual mode.
Most outdoor flights have been done in position mode, but both position and manual flights have recently been attempted unsuccessfully outdoors.
In the plots, you can see the RC commands include no yaw or roll commands, only throttle increase. I cannot find any reason that the ESC signal is so low?@Cody , please double check the actual and desired roll / pitch / yaw values in the flight review. When the vehicle is level, then roll and pitch should be close to zero and desired roll/pitch will be zero as well if you don't touch RC sticks.
If the attitude estimate is incorrect (for whatever reason) this can cause the vehicle to not be level during flight / take-off.
Alex

Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login