TOF sensor quailty down after upgrading to VOXL 1.3
-
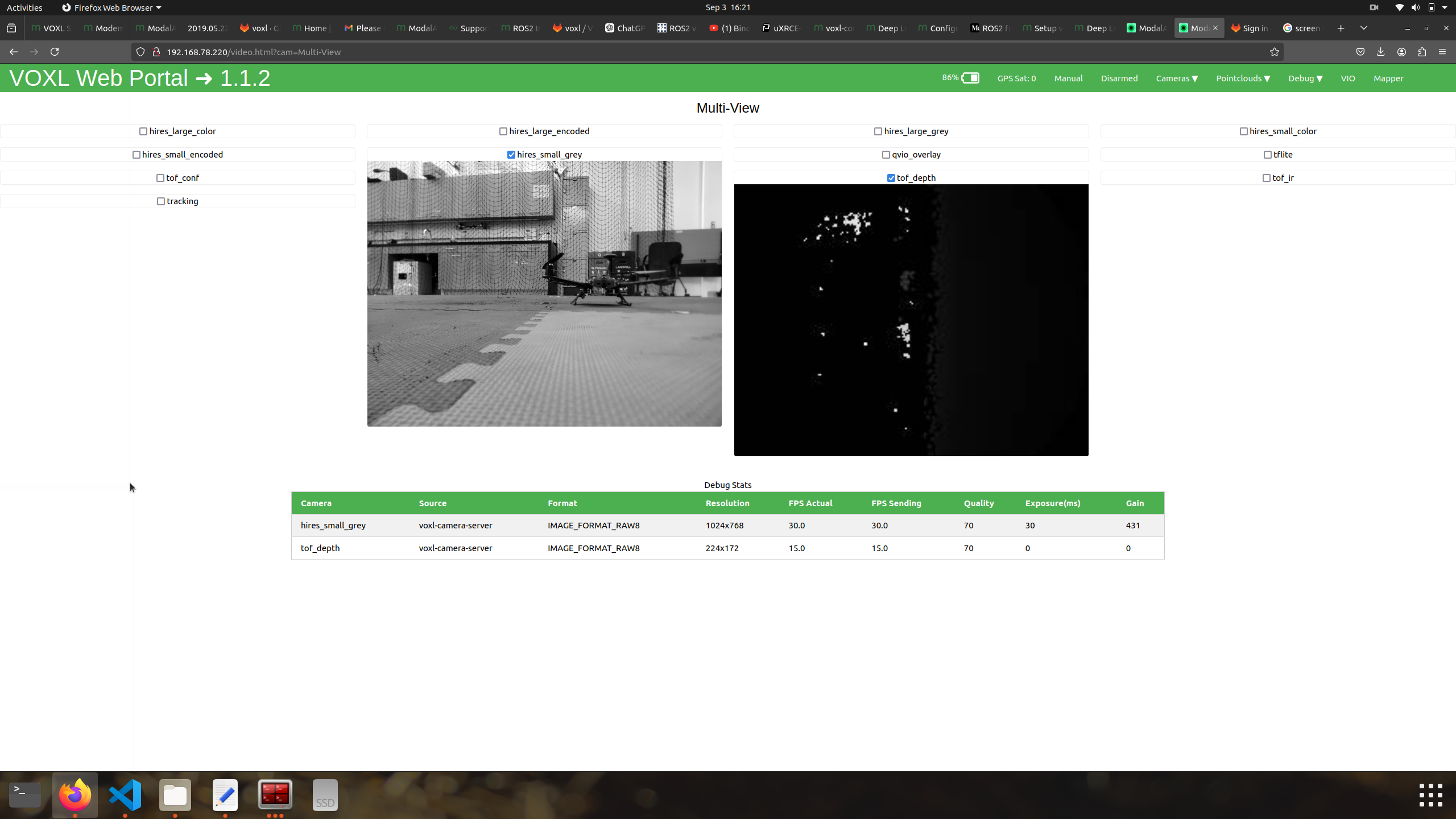
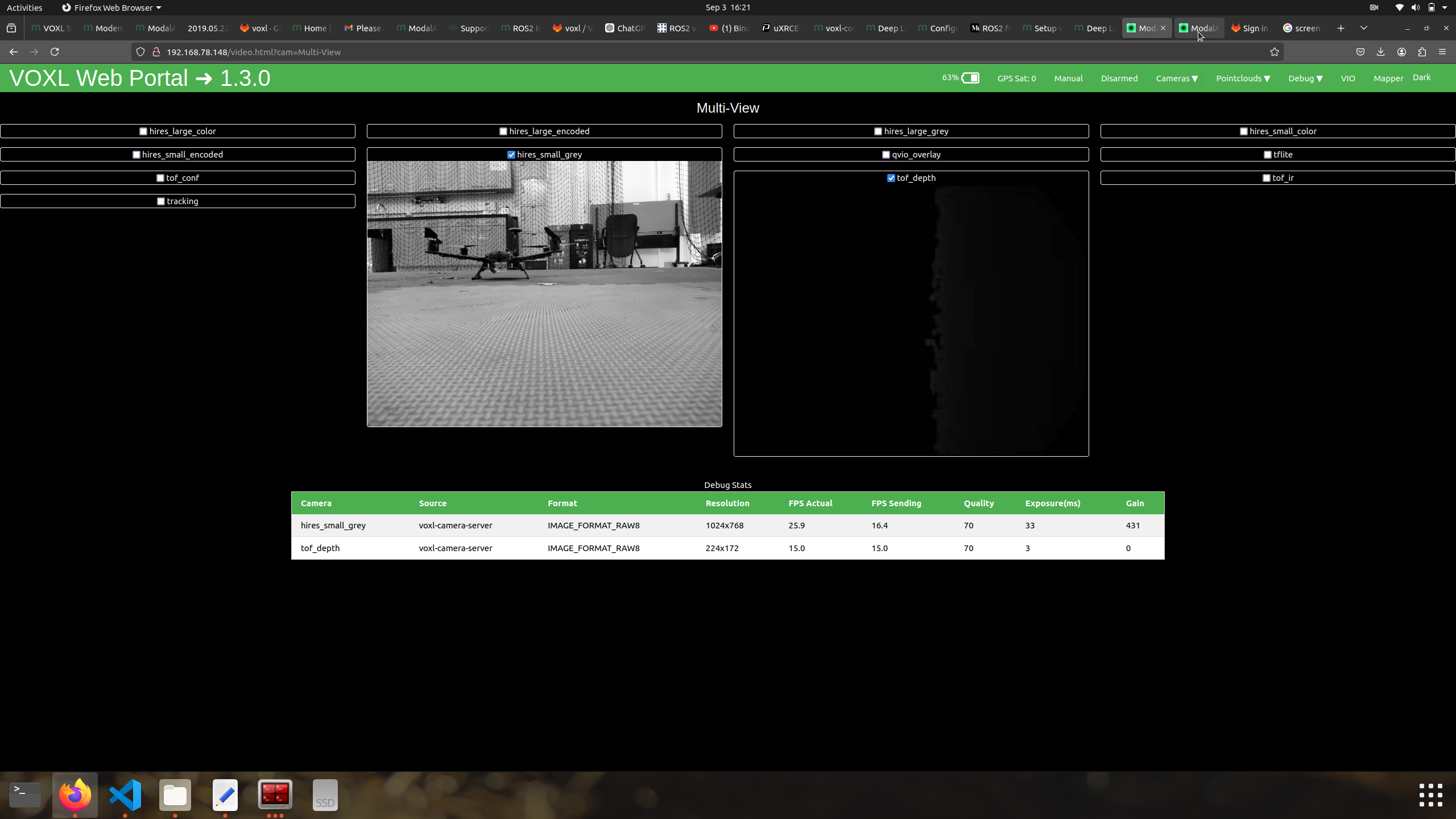
I have two Starling drones, one running VOXL-SDK 1.1.2 and the other running VOXL-SDK 1.3. I've noticed a significant difference in the depth output from the TOF sensor between the two drones. The drone with the newer VOXL version is producing poorer depth data, even though both drones are running at the same 15 FPS and have identical quality settings. I'm trying to understand the cause of this issue and explore ways to improve the depth output on the drone with the newer VOXL version.
Below are the images attached.
-
I have two Starling drones, one running VOXL-SDK 1.1.2 and the other running VOXL-SDK 1.3. I've noticed a significant difference in the depth output from the TOF sensor between the two drones. The drone with the newer VOXL version is producing poorer depth data, even though both drones are running at the same 15 FPS and have identical quality settings. I'm trying to understand the cause of this issue and explore ways to improve the depth output on the drone with the newer VOXL version.
Below are the images attached.
@Shivam-Sehgal , I believe the TOF processing settings may have changed between SDK 1.1 and 1.3 (more noise filtering was added).
In both cases, the ground is visible (although hard to see in the black image). In the 1.3.0 case, the other vehicle is not visible in TOF output, but there is less noise.
Are you able to test the two SDK versions with some easy features for TOF sensor to pick up? Some large objects with simple geometry and some small objects.
Alex
-
S Shivam Sehgal referenced this topic on
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login