Best quality for the Mapping and Planning
-
Hello all,
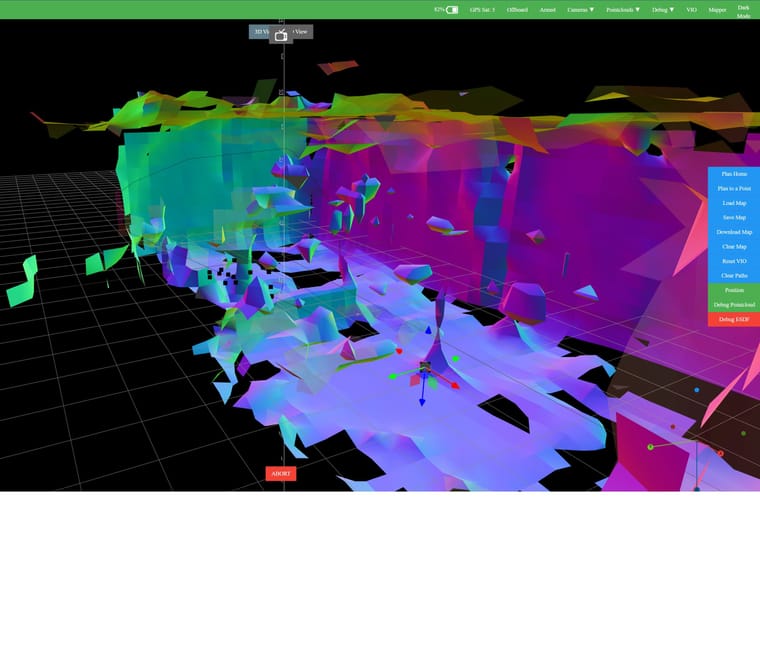
I am using the mapping and the planning with a seeker drone indore. I was wondering how I can get better results by configuring the parameters or if there is any other possible ways. I can see that I will encounter some obstacles like bubbles on the map which do not really exist, and when I turn the drone at the end of the environment to map the way back, many noises will happen.
Another question of mine is how can I make the planning and the trajectory lines thicker in the Voxl-web to be seen clearly.
I would appreciate it if you could give me some hints on these @tom.
-
Hello all,
I am using the mapping and the planning with a seeker drone indore. I was wondering how I can get better results by configuring the parameters or if there is any other possible ways. I can see that I will encounter some obstacles like bubbles on the map which do not really exist, and when I turn the drone at the end of the environment to map the way back, many noises will happen.
Another question of mine is how can I make the planning and the trajectory lines thicker in the Voxl-web to be seen clearly.
I would appreciate it if you could give me some hints on these @tom.
-
@Pooyan And something else is that sometimes when the drone is standing in a position, some bubble objects would appear exactly in front of it. Do you know how I can configure the parameters to get rid of those noises?
-
@Pooyan @Vinny @modaltb @Moderator @Zachary-Lowell-0 I would appreciate it if you could give me some hints on this:
-
@Pooyan @Vinny @modaltb @Moderator @Zachary-Lowell-0 I would appreciate it if you could give me some hints on this:
@Pooyan , if it looks like you are detecting false obstacles, it is possible that either propellers or part of the drone is being picked up as an obstacle. In which case, perhaps, you can check the output of the depth sensor first (before it is being integrated into the map).
Which sensor are you using for mapping, stereo cameras or TOF sensor?
-
@Pooyan , if it looks like you are detecting false obstacles, it is possible that either propellers or part of the drone is being picked up as an obstacle. In which case, perhaps, you can check the output of the depth sensor first (before it is being integrated into the map).
Which sensor are you using for mapping, stereo cameras or TOF sensor?
@Alex-Kushleyev Hello, thank you so much for your reply. Actually, I checked and the propellers can be seen in both stereo cameras and a little bit in the tracking cam.
for the camera in the mapper, I am using the default situation, which I am not sure in what part I should check to tell you, but in Volx-mapper.conf, I can see that tof is true. the rest of the parameters are as follows:
The other problem I can see in mapper is when I give it a point to go. It will just stop in the middle of the trajectory while there are no obstacles. As the stereo cam is used for VOA in DFS, might this be because of the propellers? I would appreciate it if there is anything I could do to prevent that.
I would appreciate it if you could tell me how to get the output of the depth sensor and check it. I have tried this:
-
@Alex-Kushleyev Hello, thank you so much for your reply. Actually, I checked and the propellers can be seen in both stereo cameras and a little bit in the tracking cam.
for the camera in the mapper, I am using the default situation, which I am not sure in what part I should check to tell you, but in Volx-mapper.conf, I can see that tof is true. the rest of the parameters are as follows:The other problem I can see in mapper is when I give it a point to go. It will just stop in the middle of the trajectory while there are no obstacles. As the stereo cam is used for VOA in DFS, might this be because of the propellers? I would appreciate it if there is anything I could do to prevent that.
I would appreciate it if you could tell me how to get the output of the depth sensor and check it. I have tried this:
@Pooyan , please see this post where another use asked how to avoid seeing obstacles using the stereo camera : https://forum.modalai.com/topic/2891/will-the-blades-spinning-affect-collision-prevention
-
@Pooyan , please see this post where another use asked how to avoid seeing obstacles using the stereo camera : https://forum.modalai.com/topic/2891/will-the-blades-spinning-affect-collision-prevention
@Alex-Kushleyev Thank you for the information.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login