avoidance collision prevention disabled
-
@AP123 Hey there. Are you running VOA against a stereo camera pair or via a ToF sensor?
If you run
voxl-inspect-points voa_pc_outand see data, then the voxl2 SDK services are good and generating the correct mavlink obstacle distance points to PX4. If not then there's a configuration issue.If that is good, then you need to make sure PX4 has
MPC_POS_MODE= Simple pos control or smooth pos control,COM_OBS_AVOIDis enabled,CP_DIST> 0 (e.g. 2) and you must have an established home position (or good position from qvio if that is the case). Typically an "obstacle system not ready" is due to the MPC_POS_MODE (I think we default to acceleration-based input).If all those check out, then it's likely missing a home position requirement in PX4 & not voxl, and we'll need to look that up.
-
@Cliff-Wong said in avoidance collision prevention disabled:
voxl-inspect-points voa_pc_out
Thank you Cliff for your support, everything is set properly and i am getting data from oxl-inspect-points voa_pc_out.

Isn't home position set once i arm the drone? How can i do that if it wont let me arm it?
-
@AP123 We just released SDK 1.1 yesterday which contains a few months worth of bug fixes, I would recommend loading that and seeing if your issue is resolved
-
@tom is it compatible with the PWM board 0065?
-
@AP123 No, didn't realize you were tackling that as well. M0065 PWM support will be in SDK 1.1.1 and we're actively polishing / testing that release and hope to have it out in the next couple weeks
-
@tom Yes i was having a bit of an issue with the ESC 4 in 1 so i stuck to the 0.9.5 SDK and PWM board. Does 1.1.0 address any ESC 4 in 1 issues?
-
@AP123 We don't have any known issues with the 4 in 1 escs. If you have an issue can you open a new thread?
-
@tom i just flashed my other voxl 2 to the 1.1.0, i like how you guys simplified the setup process for sure with the GPS, MPA, WIFI, camera and ESC setup. Although after i ran the command systemctl enable voxl-dfs-server and rebooted the drone. The data for the DFS was flowing but still, avoidance system not ready.
I did all this:
"MPC_POS_MODE = Simple pos control or smooth pos control, COM_OBS_AVOID is enabled, CP_DIST > 0 (e.g. 2) and you must have an established home position (or good position from qvio if that is the case). Typically an "obstacle system not ready" is due to the MPC_POS_MODE (I think we default to acceleration-based input)."
Do you have a brand new drone sitting somewhere you can unbox to try to reproduce this issue? I didn't have my ESC board on it and the PWM isn't compatible yet could that be the issue? I wish you guys would make a video of setting it up not just flying it around the office.
-
@AP123 This is a shot in the dark, but can you turn off your GPS and Mag and see if that works. We tried to do collision prevention with GPS on and we were getting these errors
-
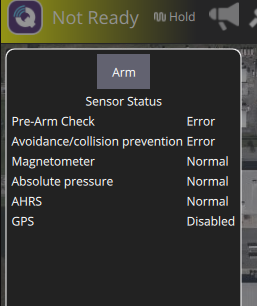
@wilkinsaf Hey Wilk, Thank you so much for the suggestion, i unplugged the GPS/MAG it changed to error, did you guys turn them off in the parms? Do you just leave it off to use collision prevention?
-
you can turn it off with has_gps and has_mag parameters I believe.
Yes, i believe this might be a PX4 thing. Might need to troubleshoot that PX4 bug in order to resolve -
Hi there, looks like there's some confusion with what mode is being tested. Here's some clarification. PX4 has 2 approaches to handling obstacle distance data:
a. Obstacle Avoidance(OA) feature which stops the aircraft if object detection occurs from the voxl-voa service. This requires CP_* parameters set that you can compare with your drone listed here based on your application.b. Collision Prevention(CP) feature, which not only includes OA, but also rerouting capability in all autonomous modes (position, alt, mission, offboard) and leverages the same voxl-voa service. This requires not only the CP_* parameters but also requires COM_OBS_AVOID = enable.
If your application requires (a), you can leave com_obs_avoid = disable and OA should work out of the box as is. If your application requires (b), then we have discovered a software bug in the VOA service. And the main reason you get the "collision module not ready", no arm possible. It has been corrected [code here] and binaries will be available in our gitlab daily builds shortly.