Seeker Sensor Calibration Rotation Problem
-
Hello team,
I've reset my seeker's PX4 parameter and have uploaded the /px4-parameters-master/helpers/seeker/ekf2_indoor_vio.params.
My question is, when calibrating the compass, which option of the "Autopilot Orientation" I should use?
If I choose ROTATION_NONE like this doc suggest, the result seems wrong.
This is the orientation I see with ROTATION_NONE on the QGC panel:
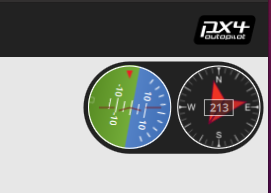
Thank you for your time.
Corey
-
@Jhih-De-Wu have you also loaded the seeker platform files?
-
That's it, thank you!
You save my day!
-
can you post the link of seeker platform file? i have the same problem but i can't find the solution... thank you!
-
can you post the link of seeker platform file? i have the same problem but i can't find the solution... thank you!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login