How to fly RB5 with VIO ?
-
I following the DOC at https://docs.modalai.com/flying-with-vio/#confirm-px4-is-getting-vio-data
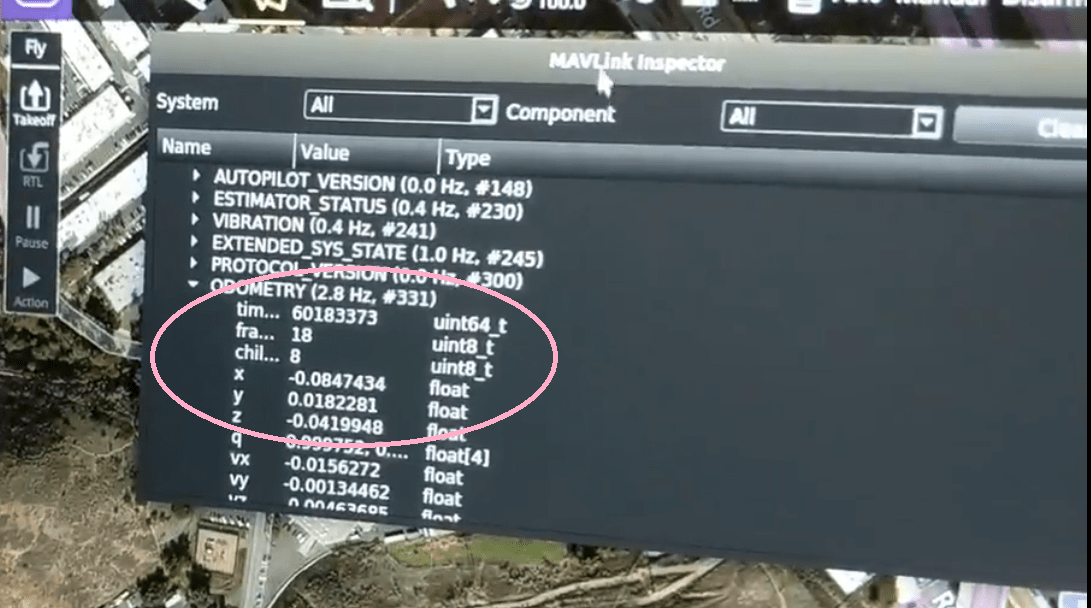
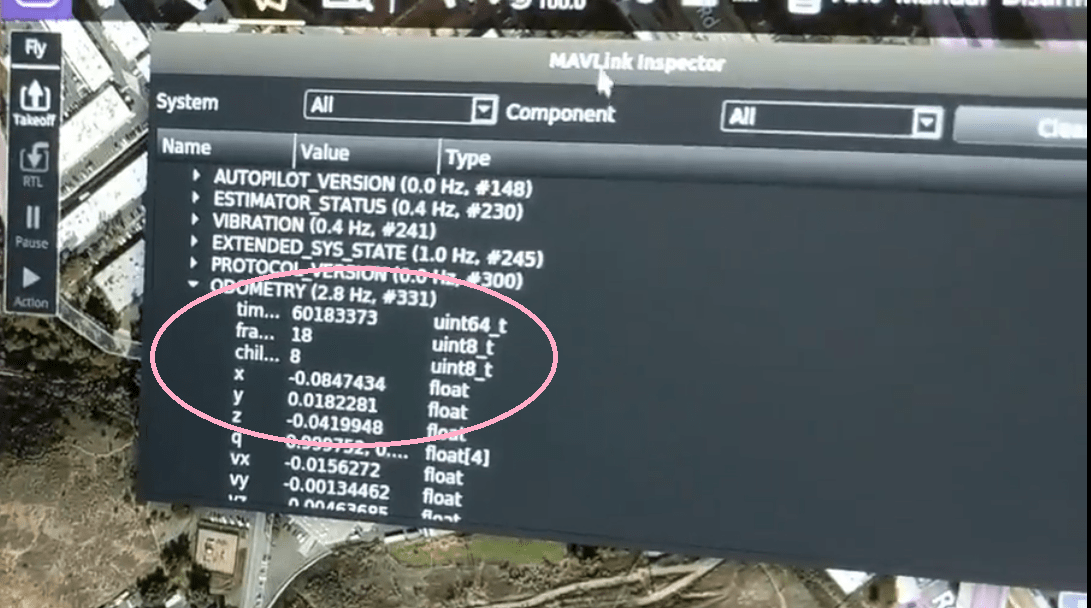
But I can't get theO DOMETRY mavlink telemetry at QC mavlink inspector.
Please help me, thanks!
rb5:/$ systemctl status rb5-qvio-server ● rb5-qvio-server.service - rb5-qvio-server Loaded: loaded (/usr/bin/rb5-qvio-server; enabled; vendor preset: enabled) Active: active (running) since Thu 2022-09-22 08:33:58 UTC; 3min 1s ago Main PID: 5573 (rb5-qvio-server) Tasks: 6 (limit: 4915) CGroup: /system.slice/rb5-qvio-server.service └─5573 /usr/bin/rb5-qvio-server Sep 22 08:33:58 m0052 systemd[1]: Started rb5-qvio-server. rb5:/$ rb5-qvio-client Waiting for server to start: /dev/rb5-qvio-pipe Successfully connected to named pipe: /dev/rb5-qvio-pipe T_imu_wrt_vio (m) |Roll Pitch Yaw (deg)| state| error_code 0.00 0.00 0.00| 0.0 -0.0 0.0| INIT | -
Hey Kevin,
This Page might be helpful to you
-
@Matt-Lohier Thanks! I already follow the page you sent. The rb5-qvio-server.service status is OK. But when we use the rb5-qvio-client to check the state is always at INIT.
-
@Kevin We've recently released VOXL SDK support for RB5-Flight, I'd highly recommend upgrading your drone to this newer system image and VOXL SDK as you will have much more software support. Checkout the video we have here: https://docs.modalai.com/Qualcomm-Flight-RB5-system-image/#voxl-sdk-for-rb5-flight
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login