Setup problems on new boards (Sensors and QGC connection problems)
-
Thanks for the update and data! OK yes let me get a troubleshoot session going on a Windows machine and I'll get back to you!
-
Great, thanks!
We'll also try repeating everything on Mac instead of Linux to see if we can further troubleshoot on our end in case something weird is happening with our Linux build.
-
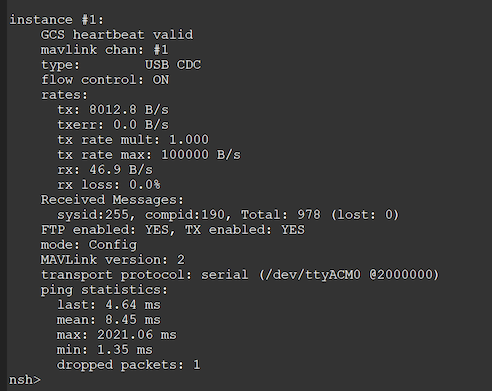
So we can confirm that the Windows USB driver is the main issue with the connection, it connected right away on QGC Mac. Looks like something's being buggy there.
We had a friend try installing the firmware via Mac instead of Linux just to test if something in our setup could be messing with the firmware, but couldn't get the bootloader to actually write the firmware and gave up after an hour of troubleshooting (that's the third engineer who's tried working on the problem from our end). We'll keep working at it on our side but we're running out of new computers to test things on.
Any thoughts on why our firmware seems to not be working correctly (e.g. attitude estimator not running on bootup)? Could there be a glitch we're running into on our machine during the firmware installation that would mess with that?
Will be good to see if you run into the same connection problem on Windows too.
-
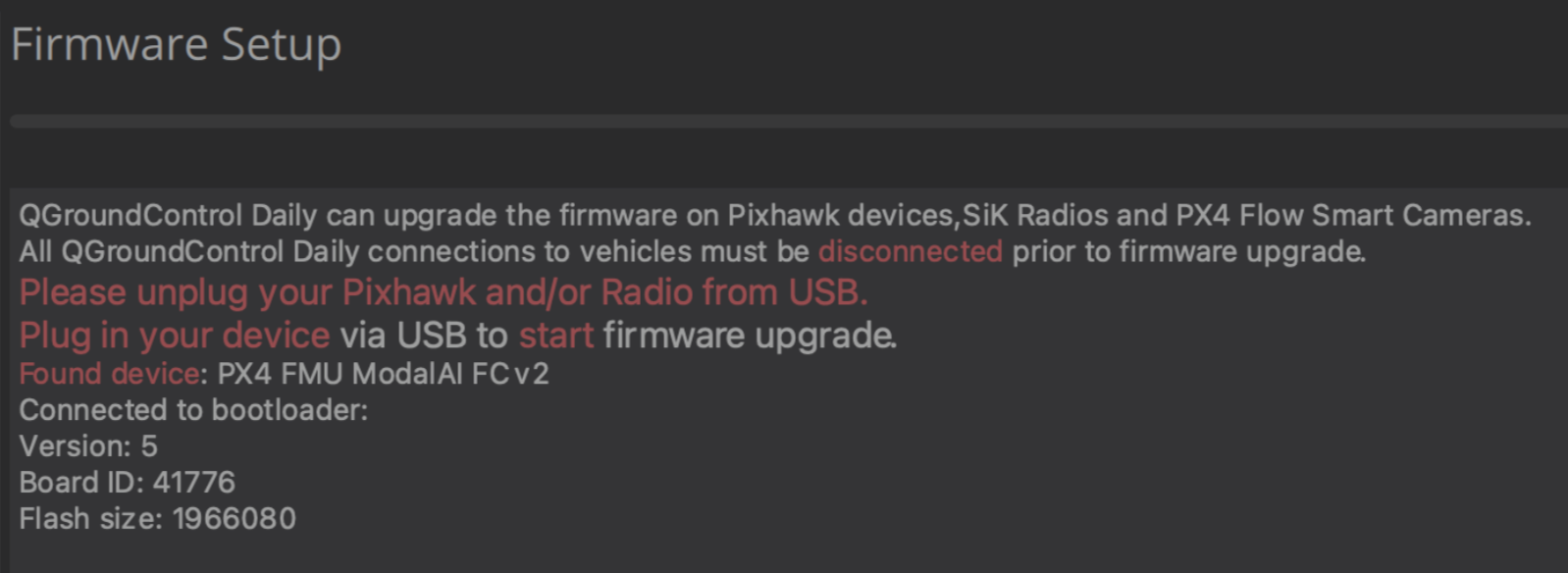
Hi @Ansel-Misfeldt , yes I believe I've replicated this on Windows (10)..... I'm digging in!
-
@modaltb Awesome, glad you were able to replicate it! We'll keep working on the firmware on our end to see if something weird was happening with our firmware flashing.
Again, appreciate the help!
-
side data point: on Windows10 with python 3.11, after I installed pyserial, I can use px_uploader to flash FW successfully.
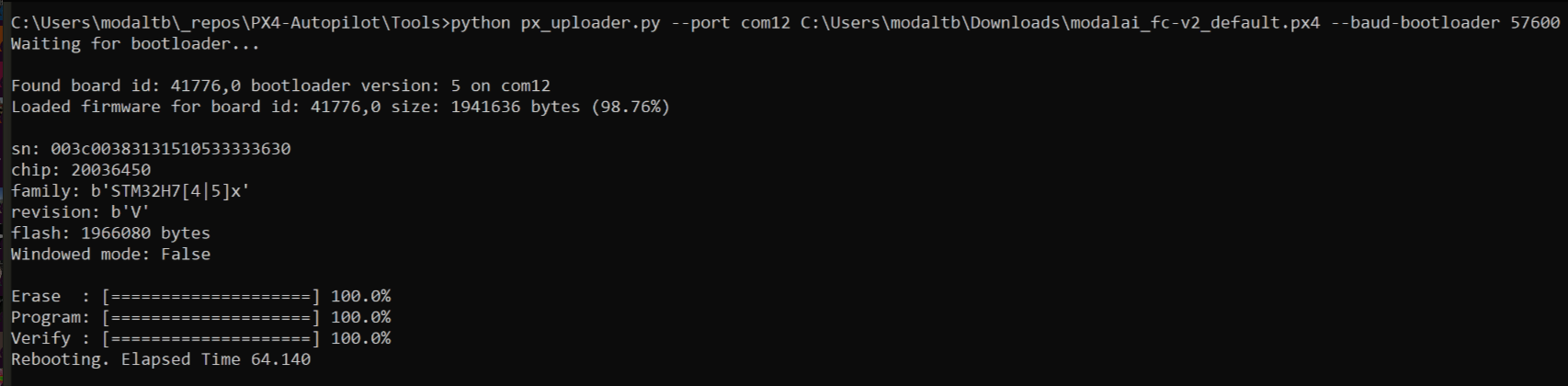
After we get USB working with QGC, I still FW update via QGC isn't going to work (perhaps) so wanted to make sure the work around is useable to get you guys flashing on Windows, so please use px_uploader.py to flash in short term
")
-
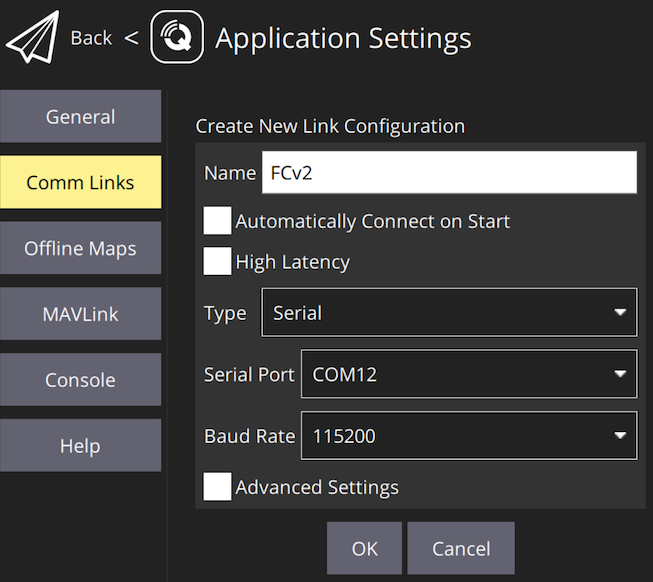
OK so I also replicated (after forgetting that you mentioned it!) that you can create the connection manually and things get connected.
Working through some QGC build errors on windows and will try to see why the 'auto connection' isn't working...
So two things we know:
- FW update has to be done via px_uploader.py tool (confirmed on my end to work on windows, ubuntu, OSX, after installing pyserial!!)
- QGC connection on Windows needs to be manually started with settings like above
-
Will try the Pyserial on Windows on our end to see if that fixes our firmware issue, which I suspect it might given everything works fine on your end. It's a super busy week for us so will try to verify that by EOW if possible! Let me know what you figure out on the auto-connect issue!
-
Hey @modaltb,
Wanted to follow up again on this thread as we managed to make some progress.
We've continued troubleshooting and can conclusively say that the firmware linked to on the https://docs.modalai.com/flight-core-v2-firmware/#v1132-px4-support page does not work when flashed on our units. We finally tried downgrading to an older version of the firmware in desperation and it worked just fine. On the linked FW version the attitude estimator doesn't start up correctly which renders the controller unusable for flight. Not sure why it worked for you when you installed that version of the firmware but we were able to replicate the behavior on two separate units in our possession. Is it possible it went unnoticed that the attitude estimator was broken when you tested it on your end?
Wanted to share that insight with you and ask if there's any progress or an ETA on getting the QGC auto connection on windows fixed?
Thanks!
-
Hi @Ansel-Misfeldt ,
I believe by default the attitude estimator isn't running because we had the internal mag disabled in our current production release, as our default setup is used in an M500 like vehicle with an external mag. Essentially we are shipping our setup that we use.
For example, if you set EKF2_MAG_TYPE to NONE and SYS_HAS_MAG to Disabled and reboot the flight controller, the attitude estimator will likely be running?
The other options are:
- use external mag
- use the SD card method above to start the internal mag to startup on default
- recompile our branch, enabling this line of code:
https://github.com/modalai/px4-firmware/blob/modalai-1.13.2/boards/modalai/fc-v2/init/rc.board_sensors#L25
and load the FW - rebuild off PX4 main, which has the mag enabled
As for the Windows connection issue, there's a work around currently so it's not deemed a show stopper at this point, and its in our tracking system to be looked at but I have not time frame unfortunately.
-
FW update feature is working in QGC daily build starting today, no change needed on flight core v2.
-
J jcroughan referenced this topic on
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login